


Учебная библиотека АВОК Северо-Запад
ипоэтомудлядавленийдо13баробычно
достаточно одной ступени сжатия. Малая
обратная утечка в элементе означает также, что эффективно работают даже относительно небольшие компрессоры.
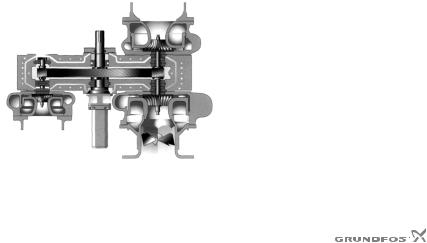
На рисунке 4.2.7.д представлена
модель маслосмазываемого винтового
компрессора GA-7 марки «Атлас Копко»,
производительностью 1м3/мин и макси-
мальным давлением 10 бар.
4.3. Турбокомпрессоры
Принципиально турбокомпрессор
можно представить как несколько после
довательно соединенных на одном валу
радиальных вентиляторов (или осевых). Между ступенями для повышения КПД
устанавливаются направляющие аппа
раты. Турбокомпрессор по сравнению
Рис. 4.2.7.д. Маслосмазываемый винтовой компрессор GA7 марки
«Атлас Копко» одноступенчатого
сжатия на ресивере
Рис. 4.2.8. Турбокомпрессор
Генеральный спонсор – |
159 |
Учебная библиотека АВОК Северо-Запад
с другими компрессорами более компактен и надежен и имеет гораздо большую производительность.
Для регулирования производительности компрессора часто устанавливается перепускной клапан, или регулирование производят изме-
нением частоты вращения рабочего колеса.
Динамические компрессоры (называемые также «турбокомпрессоры») бывают осевой и радиальной конструкций. Компрессоры радиальной конструкции называют центробежными. Динамический компрессор работает с постоянным давлением в противоположность объемным компрессорам, работающим с постоянной производительностью. Про-
изводительность динамического компрессора подвержена внешним ус
ловиям, например, небольшое изменение давления на входе приводит к большому изменению производительности.
4. 4. Центробежные компрессоры
Центробежные компрессоры характеризуются радиальным выходным потоком. Воздух подводится в центр вращающегося рабочего колеса с радиальными лопатками (крыльчатки) и выбрасывается к периферии центробежными силами. Перед поступлением в центр следующей
крыльчатки воздух проходит диффузор и спиральную камеру, где кине-
тическая энергия превращается в давление. Степень повышения давле-
ния на каждой ступени зависит от увеличения скорости воздуха после
крыльчатки. Промежуточное охлаждение воздуха необходимо вследс-
твие того, что его температура на выходе из каждой ступени накладывает ограничение на эффективность сжатия.
Р ис. 4.3.1. Схема трехступенчатого
ис. 4.3.1. Схема трехступенчатого
центробежного компрессора компании
«Атлас Копко»
Центробежный компрес-
сор с числом ступеней вплоть до
шести и давлением до 25 бар –
не редкость. Крыльчатка может
иметь либо открытую, либо за-
крытую конструкцию. Открытая
конструкция характерна для воз
душных компрессоров
На рис. 4.3.1 представлена
схема воздушного трехступен
чатого центробежного компрес-
сора
160 |
Генеральный спонсор – |
Учебная библиотека АВОК Северо-Запад
Рис. 4.3.2. Трехступенчатый центробежный компрессор марки «Атлас Копко» серии
ZH 4000
Центробежный компрессор «Атлас Копко» серии ZH представляет собой устройство динамического типа сжатия, водяного охлаждения, который подает сжатый воздух без примесей масла и пульсаций. Все элементы компрессора «Атлас Копко» смонтированы на собственной, единой силовой раме и оснащены всеми соединительными патрубками и трубопроводами, а также автоматической системой слива конденсата.
См. рис. ZH 4000 (4.3.2).
В состав компрессора входят: компрессорный узел с приводом через муфту, элект-
родвигатель, системы смазки,
охлаждения, регулирования и
контроля. Компрессор может
быть помещен в звукоизолиру-
ющийкорпус,вкоторомсмонтирован шкаф электроавтоматики
с микропроцессорным модулем
Elektronikon® . (см. рис.4.3.3).
Р ис. 4.3.3. Удобная для пользователя панель
ис. 4.3.3. Удобная для пользователя панель
управления контроллера «Электроникон»
показывает все эксплуатационные параметры
компрессора «Атлас Копко», например давле-
ния и температуры; данные логически группи
руются для непосредственного считывания
Генеральный спонсор – |
161 |

Учебная библиотека АВОК Северо-Запад
5. АВТОМАТИЗАЦИЯ ИНЖЕНЕРНОГО
ОБОРУДОВАНИЯ ЗДАНИЙ
5.1. Основные понятия и определения
Автоматизация инженерного оборудования зданий и протекаю-
щих в нем технологических процессов – это совокупность технических
средств и методов, освобождающих человека от функций контроля и уп-
равления
Автоматизация оборудования может осуществляться в пределах од-
ного агрегата, машины, насоса, компрессора, или группы агрегатов, свя
занных между собой общими условиями технологического процесса.
В зависимости от выполняемых функций различают основные виды
автоматизации: управление, сигнализация, блокировка, контроль, за-
щита и регулирование
Управление объектом – это воздействие на него с целью обеспечения требуемых параметров работы. Например, для вентиляционных
установок и кондиционеров – это поддержание заданных значений рас-
хода воздуха или температуры в помещении при изменении внешних и
внутренних условий.
Система управления, в которой поддержание заданного технологи-
ческого процесса выполняется без участия человека-оператора, назы-
вается системой автоматического управления (САУ)
Современные системы управления обычно создаются с несколь-
кими ступенями (уровнями) управления. Если рассматривать системы
управления вентиляцией и кондиционированием воздуха таких объектов как большие общественные здания и производственные помещения,
то на первом (нижнем, локальном) уровне располагаются автономные системы управления параметрами воздуха отдельных помещений или отдельными установками и устройствами. На верхнем уровне осущест-
вляется управление параллельной работой систем локальных уровней с учетом показателей их тепловых нагрузок, контроля над работой всех систем, централизованного учета отказов в работе и др. На этом уровне для обработки большого объема информации используется вычислительная техника. Такие системы выдают информацию в форме, удобной
для принятия решений (режим советчика), или непосредственно коррек-
162 |
Генеральный спонсор – |

Учебная библиотека АВОК Северо-Запад
тируют задания системам локального уровня (супервизорный режим).
Непосредственно управление объектом осуществляется комплек-
сом технических средств (КТС) в состав которого входят: измери
тельные преобразователи, исполнительные механизмы, контроллеры,
линии связи, внешние устройства – компьютер, принтер, модем и т.п.
Измерительный преобразователь – это средство измерений,
предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и хранения, но не поддающейся непосредственному восприятию наблюдателем (в практике применяется термин «датчики»).
Датчики осуществляют преобразование физических величин, на-
пример, температуры, давления, расхода, влажности, химического со
става в выходной сигнал. В зависимости от вида используемой энергии
различают датчики электрические, пневматические, гидравлические.
Наиболее удобны для дальнейшей обработки электрические сигналы:
сопротивление, ток, напряжение, частота, емкость, индуктивность
Для удобства и унификации параметры выходных сигналов нормируются, и, соответственно, преобразователи с выходными сигналами согласно существующих норм называются преобразователями с унифи-
цированным выходным сигналом
Наиболее распространены измерительные преобразователи:
–термопреобразователи сопротивления, осуществляющие преобразование температуры среды, где размещен преобразователь, в сопротивление; измерение температуры с помощью таких преобра-
зователей сводится или к измерению падения напряжения на тер-
мосопротивлении или силы тока (при использовании термопреоб-
разователей сопротивления с унифицированным токовым выходом)
специальными приборами;
–преобразователи давления, перепада давления, осуществляющие преобразование этих величин в ток или напряжение;
–преобразователи расхода, осуществляющие преобразование рас-
хода жидкости или газа в частоту, ток или напряжение
Принципдействиядатчиковразличен,нопозависимостивыходного
сигнала от измеряемого параметра их обычно разделяют на аналоговые,
двухпозиционные и дискретные (с цифровым выходом).
Аналоговыми называются датчики, у которых в зависимости от изменения измеряемой физической величины выходной сигнал меняет-
Генеральный спонсор – |
163 |

Учебная библиотека АВОК Северо-Запад
ся непрерывно и пропорционально ей по известной (обычно линейной)
зависимости. Зависимость изменения выходной величины называется
нормирующей функцией преобразования (НФП) (рис. 5.1).
Датчики, у которых выходной
I, мА
|
|
сигнал в зависимости от измене |
|
20 |
|
ния измеряемой величины меня- |
|
|
ется дискретно, называются диск |
||
|
|
||
|
|
ретными или двухпозиционными. |
|
|
|
Например, на рис. 5.2 показано, |
|
100 |
P, кПа |
что изменение выходного сигнала |
|
Рис. 5.1. Зависимость выходного сигнала |
датчика от 1 мА до 20 мА и наоборот |
||
происходит за малый промежуток |
|||
тока от измеряемого давления |
|
||
|
времени при достижении измеряе |
||
аналогового датчика давления |
|
||
мым давлением заданной величины – 100 кПа. При этом изменение от 1 до 20 мА происходит при величине давления 100 + 0,5 • кПа, а от 20 до 1 мА при 100 - 0,5 • . Это делается для исключения так называемо-
го «дребезга», т.е. изменения выходного сигнала при колебании значе-
ния измеряемой величины около значения уставки (на рис. 5.2 значение уставки – 100 кПа), а величина определяет гистерезис срабатывания
датчика
Р,кПа |
|
У некоторых типов выходной |
100 |
|
сигнал двухпозиционного датчика |
|
представляет собой состояние ме- |
|
|
|
|
|
|
ханических контактов (замкнуто – |
I, мА |
I, мА |
разомкнуто), выходного транзис- |
20 |
|
тора (открыт – закрыт). Подобные |
|
I, мА |
датчики иногда называются – «су |
|
хой контакт». |
|
Рис. 5.2. Зависимость выходного сигнала |
С развитием микроэлектро- |
|
|
тока от измеряемого давления |
|
|
ники в последние десятилетия все |
|
двухпозиционного датчика давления |
||
шире стали применяться дискрет
ные (цифровые или «интеллектуальные») датчики, на выходе которых не электрический сигнал, пропорциональный измеряемой величине, а цифровой код, т.е. значение измеряемого параметра в двоичном коде.
Устройство управления. Сбор информации об объекте, принятие решения и выработка управляющих воздействий (команд) осуществля-
ется устройством управления – контроллером.
164 |
Генеральный спонсор – |

Учебная библиотека АВОК Северо-Запад
Центральной частью контроллера является микроЭВМ, управляю-
щая преобразованием электрических сигналов в двоичный код (анало- го-цифровое преобразование) или приемом сигнала от «интеллектуаль-
ных» датчиков, их измерение, контроль, представление информации о
работе объекта оператору или диспетчеру, формирование управляющих
воздействий в соответствии с заложенной в контроллер программой.
По структуре АСУ можно разделить на централизованные (сосредо-
точенные, распределенные) и децентрализованные.
Централизованные системы имеют устройство связи с объектом и центральный процессор. Устройства связи с объектом (УСО), входящие
в состав распределенных АСУ могут или находиться рядом с центральным процессором (сосредоточенные АСУ), или удалены от него на зна-
АСУ могут или находиться рядом с центральным процессором (сосредоточенные АСУ), или удалены от него на зна-
чительное расстояние (распределенные АСУ). В подобных системах УСО
устройство связи обеспечивает:
–обработку сигналов от объекта управления и трансляцию этих сиг-
налов в центральный процессор;
–формирование управляющих воздействий (команд) для объекта по
командам центрального процессора
Всвязи с тем, что выход из строя процессора или устройства связи
приводит к отказу всей системы, то в большинстве случаев их дублируют. Децентрализованные АСУ представляют набор контроллеров, каж-
дый из которых осуществляет управление отдельным локальным конту-
ром объекта управления, при этом контроллер осуществляет обработку
входных сигналов и формирование выходных управляющих сигналов в
соответствии с собственным алгоритмом, командами оператора с собс-
твенной клавиатуры или поступающими с верхнего по иерархии уровня
управления
При такой организации выход из строя одного из контроллеров при-
водит к деградации функций АСУ, часть которой продолжает работать. В
этом случае существенно повышается живучесть системы
Основой децентрализованной системы управления являются объ- ектно-ориентированные контроллеры, которые могут быть созданы на базе контроллеров как свободно программируемых, так и на базе спе-
циализированных
Выбор варианта структуры АСУ определяется особенностями конкретного объекта, стоимостью контроллеров, их техническими характе-
ристиками, в первую очередь – надежностью
Генеральный спонсор – |
165 |

Учебная библиотека АВОК Северо-Запад
Исполнительные механизмы. Изменение параметров объекта осу-
ществляется исполнительными механизмами – электродвигателями, элек
тромагнитами и т.п., которые, меняя положение регулирующих органов –
клапанов, заслонок, шиберов и др., меняют параметры работы объекта. Например, необходимо поддерживать заданную температуру в по-
мещении,котораяменяетсявтечениеднявзависимостиоттемпературы
наружного воздуха. Изменение температуры осуществляется изменением расхода воздуха, подаваемого в помещение. Расход воздуха может
изменяться или положением регулирующих клапанов, размещенных в
сети воздуховодов, или изменением частоты вращения рабочего колеса
вентилятора
Линии связи. Для связи контроллера с датчиками, исполнительны-
ми механизмами и другими внешними устройствами необходимы линии связи, представляющие собой набор различных кабелей, характеристи-
ки которых определяются конкретными проектами
Системы управления технологическими процессами, в которых
управляющими являются автоматические устройства, вычислительные
машины и человек, называются автоматизированными системами
управления технологических процессов (АСУ ТП). В настоящее вре-
мя, кроме термина АСУ, для обозначения систем такого уровня широкое
распространение получил термин SCADA (Supervisory Control And Data
Acquisition – система диспетчерского управления и сбора данных). Автоматизация процесса управления позволяет исключить на объ-
ектах управления постоянный оперативный персонал, задачей которого
было непосредственное управление объектом, и осуществлять контроль за работой нескольких объектов, территориально размещенных в разных местах в диспетчерских, где собирается информация об объекте и где диспетчер имеет возможность воздействовать на работу объекта.
Информация о работе объекта и команды управления им передаются
по цифровым линиям связи посредством стандартных интерфейсов. При
значительной удаленности объекта от диспетчерской используются модемы,илиобычные,приналичиителефоннойлиниисвязи,илиприееотсутствии радиомодемы, модемы, работающие в стандартах GSM или GPRS.
Для представления диспетчеру информации о ходе техпроцесса
используется компьютер и программное обеспечение, выполненное на базе SCADA систем, позволяющее контролировать работу объекта в ре-
альном времени
166 |
Генеральный спонсор – |