

Емкостные преобразователи
Для контроля перемещений очень часто используются емкостные преобразователи. Принцип действия емкостных преобразователей основан на взаимодействии двух заряженных тел (электродов), образующих конденсатор, значение емкости которого изменяется под действием входной преобразуемой величины.
Емкость
С между двумя параллельными проводящими
плоскостями площадью S,
разделёнными малым зазором
 без
учёта краевого эффекта определяется
выражением:
без
учёта краевого эффекта определяется
выражением:
 (3)
(3)
где:
 ;
;
Изменение
емкости посредством механических
воздействий можно производить путём
изменения: зазора
 ,
площадиS,
материала диэлектрика
,
площадиS,
материала диэлектрика
 ,
а так же изменением
,
а так же изменением за счёт механических деформаций
диэлектрика.
за счёт механических деформаций
диэлектрика.
Для получения большей точности используют дифференциальные датчики. Емкостные дифференциальные датчики с переменным зазором (рис. 7) между двумя параллельными пластинами, расположенными одна против другой, на которые подаётся э.д.с., помещается третья подвижная пластина – ротор, которая под действием внешней силы (перемещения) перемещается поступательно. С этой пластины и осуществляется съём сигнала на усилитель.[7]
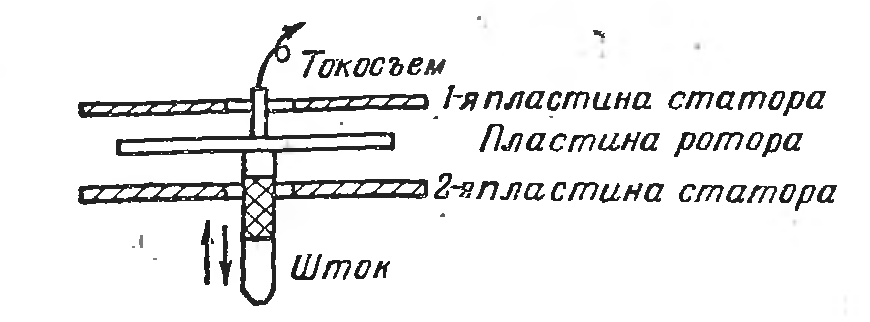
Рисунок 7 – Емкостной дифференциальный преобразователь с переменным зазором
При
проектировании емкостных преобразователей
следует учитывать паразитные емкости
 ,
создаваемые как конструктивными
элементами, так и соединительными
проводами, которые шунтируют емкость
,
создаваемые как конструктивными
элементами, так и соединительными
проводами, которые шунтируют емкость преобразователя и могут вызывать
значительное уменьшение его
чувствительности.
преобразователя и могут вызывать
значительное уменьшение его
чувствительности.
Механотроны
Механотронные преобразователи (механотроны) относятся к большой группе электровакуумных электронно-механических преобразователей, действие которых основано на механическом управлении электронным током электровакуумных приборов. Управление электронным током в механотронах осуществляется путём непосредственного механического перемещения их электродов. Они работают на постоянном токе, обладают высокой чувствительностью и очень малой зоной нечувствительности.
В зависимости от вида измеряемой механической величины механотроны подразделяются на преобразователи перемещений, усилий, давлений, ускорений, углов поворота, параметров вибраций, а так же частоты.
Подвижные электроды механотрона соединяются с его оболочкой (баллоном) посредством упругого элемента (мембраны, консольной пружины, торсионного подвеса и т.д.). Совокупность электродов механотрона называется его электродной (или механотронной) системой, а упругий элемент вместе с подвижными электродами и другими подвижными деталями – его кинематической системой.
Кинематическая система интересующих нас механотронных преобразователей линейных перемещений, как правило, имеет внешний восприниматель механического сигнала, и эти преобразователи обычно называются механотронами с внешним механическим управлением.
Процесс
преобразования входной механической
величины М в выходную электрическую Э,
происходящий в механотроне, можно
разделить на два этапа. На первом этапе
механическая величина М преобразуется
кинематической системой механотрона
в линейное или угловое перемещение
подвижных электродов
 .
На втором этапе величина
.
На втором этапе величина преобразуется электродной системой в
изменение тока или напряжения, т.е. в
электрическую величину Э. Зависимость
между величинами Э и М – характеристика
преобразования в общем случае может
быть представлена выражением:
преобразуется электродной системой в
изменение тока или напряжения, т.е. в
электрическую величину Э. Зависимость
между величинами Э и М – характеристика
преобразования в общем случае может
быть представлена выражением:
Э = f(М) (4)
Наибольшее распространение в мехатронных преобразователях нашли кинематические системы, упругие звенья которых выполнены в виде:
плоской мембраны, в центр которой впаян или вварен управляющий стержень (используется в преобразователях перемещений и усилий, а также в мехатронных преобразователях ускорений и угломерах с внешним механическим управлением);
плоских и гофрированных мембран, а также сильфонов и мембранных коробок (используются в преобразователях давлений);
консольных пружин, консольных балок на торсионном подвесе и двухплечих балок (типа коромысла) на торсионном подвесе (используются в преобразователях ускорений, параметров вибраций и углов поворота).
Рассмотрим механотрон, предназначенный для преобразования линейных перемещений (рис.8).
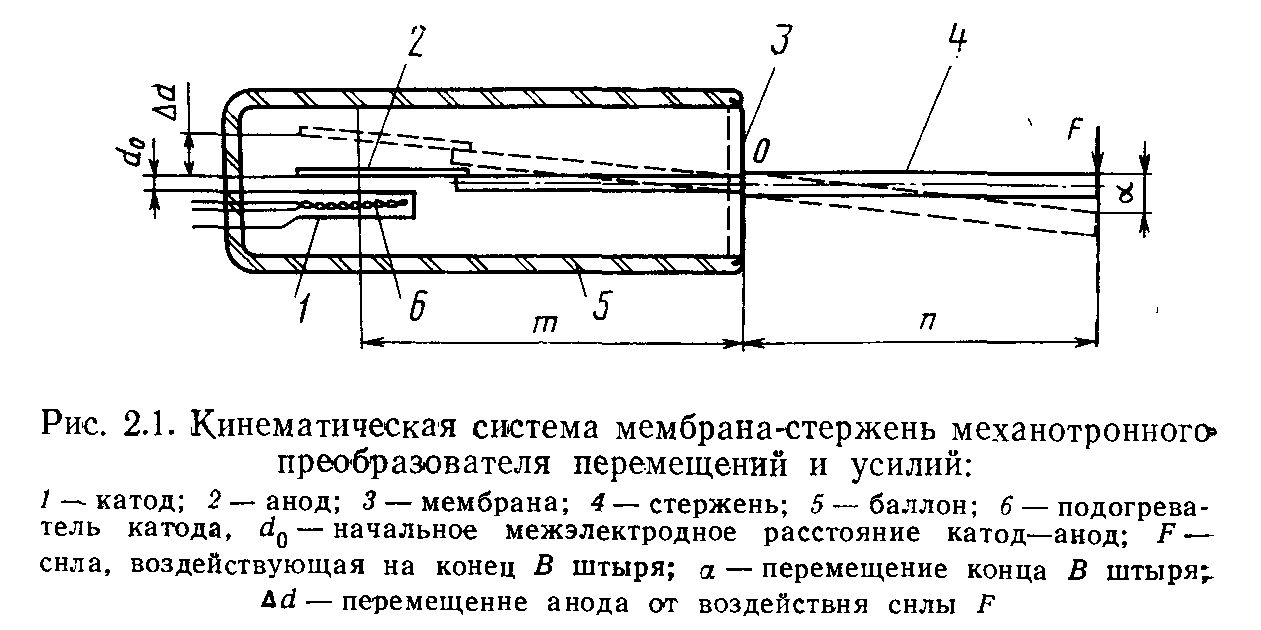
Рисунок 8
В
таком преобразователе входной механический
сигнал – перемещение
 ,
подаваемый на внешний конец стержня
механотрона, преобразуется в перемещение
подвижного электрода
,
подаваемый на внешний конец стержня
механотрона, преобразуется в перемещение
подвижного электрода таким образом, что:
таким образом, что:
 (5)
(5)
где:
m
и n
– длина соответственно внутренней и
внешней частей стержня. Очевидно, что
при этом
 может быть больше, меньше или равно
может быть больше, меньше или равно ,
а чувствительности механотрона по току
и по напряжению к перемещению конца его
штыря определяются следующими
соотношениями:
,
а чувствительности механотрона по току
и по напряжению к перемещению конца его
штыря определяются следующими
соотношениями:
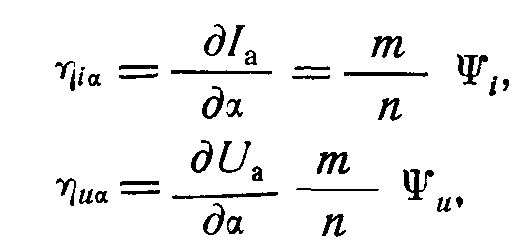 (6)
(6)
где:
 - соответственно чувствительности по
току и по напряжению электродной системы
механотрона.
- соответственно чувствительности по
току и по напряжению электродной системы
механотрона.
Кинематическая система механотрона представляет собой двухплечий рычаг (рис. 8) с упругой опорой в точке О.
Итак, перемещение анода относительно неподвижного катода изменяются величина и конфигурация электрического поля между электродами, что изменяет силу анодного тока.[11]
Такие преобразователи хороши, однако, не годны для измерения нашей величины, т.к. имеют недостаточно большой диапазон измерений (от 0,01 до 100 мкм).