

Обзор аналогов и прототипов
Рассмотреть все известные сегодня датчики линейных перемещений, представляется невозможным ввиду их огромного разнообразия. Поэтому рассмотрим основные типы преобразователей, наиболее часто применяемых и подходящих для измерения нашей величины.
Реостатные преобразователи
Реостатные преобразователи являются подвидом резистивных преобразователей (преобразующих измеряемую величину в омическое сопротивление). Такие преобразователи требуют дополнительного источника питания, т.е. являются параметрическими.
Реостатным преобразователем называют реостат, движок которого перемещается под воздействием измеряемой неэлектрической величины. Входная величина реостатного преобразователя – угловое или линейное перемещение движка, к которому должна быть сведена измеряемая величина. Выходной величиной является активное сопротивление, распределённое линейно или по угловому закону движения этого движка.[2]

6
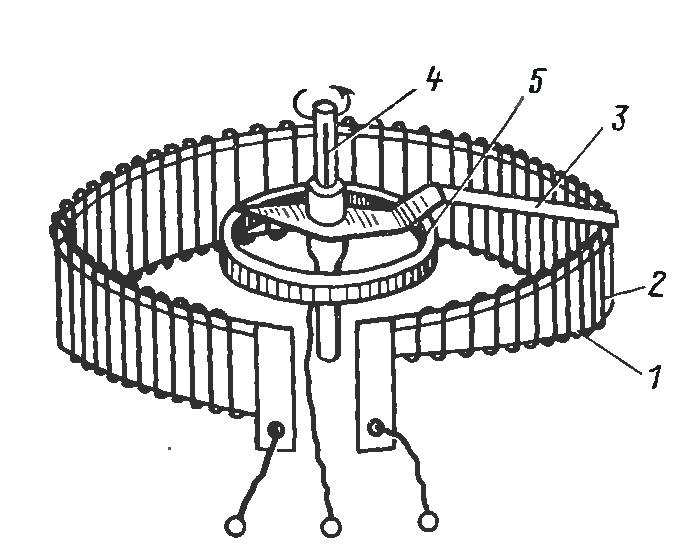
Рисунок 4 – Устройство реостатного преобразователя угловых перемещений
На корпус 1 из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу перемещается щетка 3. Добавочная щётка 6 скользит по токосъёмному кольцу 5. Обе щётки изолированы от приводного валика 4.
а)
б)
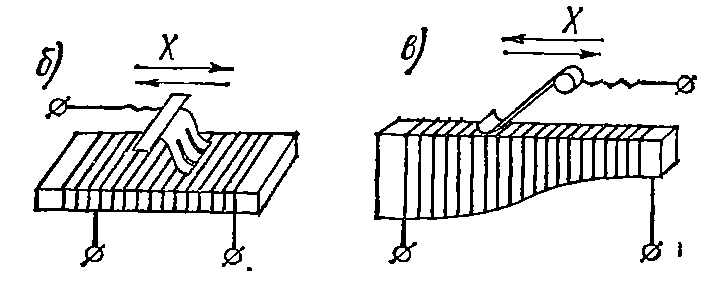
Рисунок 5 – Реостатные преобразователи для линейных (а) и для функционального преобразования линейных перемещений (б)
В качестве материала обмотки для реостатных преобразователей применяют сплав платины с иридием (5…30%), константан, нихром или фехраль. В ответственных случаях используют платиновую проволоку (90% Pt +10% Ir). Диаметр проволоки равен 0,03 мм. Это позволяет изготавливать малогабаритные высокоомные преобразователи (весом 10-12 г при размерах 1х2 см). Для изготовления каркасов применяются диэлектрики (гетинакс, пластмасса, керамика) и металлы (дюралюминий с анодированной поверхностью). Щётка преобразователя выполняется либо из проволок, либо из плоских пружинящих полосок, причём используются как чистые металлы (платина, серебро), так и сплавы (платина с иридием, фосфористая бронза, медно-серебряные сплавы и т.д.).[6] Качество контакта щётки и обмотки определяется контактным давлением, которое выбирается в широких пределах от десятых долей грамма до сотен граммов в зависимости от материалов контакта и обмотки и условий работы преобразователя. Габариты преобразователя определяются значением измеряемого перемещения, сопротивлением обмотки и мощностью, выделяемой в обмотке.
Для получения нелинейной функции преобразования применяются функциональные реостатные преобразователи. Нужный характер функции преобразования очень часто достигается профилированием каркаса преобразователя (рис. 5, б).
Погрешность реостатных преобразователей зависит от числа витков W:
 (1)
(1)
т.е.
с увеличением числа витков ( )
погрешность уменьшается.
)
погрешность уменьшается.
Число
витков выбирают равным 100 200.
200.
Существует так же погрешность преобразования, которая в реостатных преобразователях обусловлена тем, что зависимость изменения сопротивления от перемещения щетки имеет ступенчатый характер, так как сопротивление изменяется скачками на значение сопротивления одного витка. Максимальная приведённая погрешность при этом:
 (2)
(2)
где:
 – максимальное сопротивление одного
витка;R
– полное сопротивление преобразователя.
– максимальное сопротивление одного
витка;R
– полное сопротивление преобразователя.
Иногда применяются реохордные преобразователи, в которых щётка скользит вдоль оси проволоки. В этих преобразователях отсутствует указанная выше погрешность.
К достоинствам реостатных преобразователей относятся возможность получения высокой точности, значительных по уровню выходных сигналов и относительная простота конструкции. Недостатки – наличие скользящего контакта, необходимость относительно больших перемещений движка, а иногда и значительного усилия для его перемещения.