

Индуктивные преобразователи
Индуктивный преобразователь представляет собой катушку индуктивности (дроссель), полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. Такие преобразователи так же являются параметрическими.
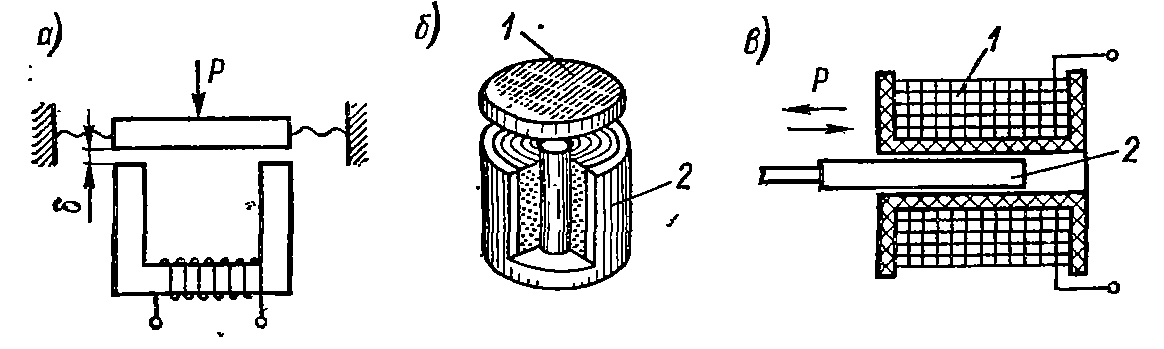
Рисунок 5 – Типы индуктивных преобразователей
На
рисунке 5, а изображен наиболее
распространённый преобразователь с
малым воздушным зазором
 ,
который изменяется под действием
измеряемой величины Р. Рабочее перемещение
в преобразователях с переменным зазором
составляет 0,01-10 мм. В этих преобразователях
могут быть использованы ферритовые
элементы 2 (рис 5, б), выпускаемые
промышленностью; для изготовления
подвижного сердечника 1 используется
основание такого же элемента 2, стенки
которого сошлифовываются. На рис. 5, в
изображен преобразователь с разомкнутой
магнитной цепью. Он представляет собой
катушку 1, внутри которой помещён стальной
сердечник 2. Перемещение сердечника
вызывает изменение индуктивности
катушки. Этот тип преобразователя
применяется для измерения значительных
перемещений сердечника (10…100 мм). Одно
из основных достоинств индуктивных
преобразователей – возможность получения
большой мощности преобразователя (до
1…5 В*А), что позволяет пользоваться
сравнительно малочувствительным
указателем на выходе измерительной
цепи и регистрировать измеряемую
переменную величину самописцем или
вибратором осциллографа без предварительного
усиления.[3]
,
который изменяется под действием
измеряемой величины Р. Рабочее перемещение
в преобразователях с переменным зазором
составляет 0,01-10 мм. В этих преобразователях
могут быть использованы ферритовые
элементы 2 (рис 5, б), выпускаемые
промышленностью; для изготовления
подвижного сердечника 1 используется
основание такого же элемента 2, стенки
которого сошлифовываются. На рис. 5, в
изображен преобразователь с разомкнутой
магнитной цепью. Он представляет собой
катушку 1, внутри которой помещён стальной
сердечник 2. Перемещение сердечника
вызывает изменение индуктивности
катушки. Этот тип преобразователя
применяется для измерения значительных
перемещений сердечника (10…100 мм). Одно
из основных достоинств индуктивных
преобразователей – возможность получения
большой мощности преобразователя (до
1…5 В*А), что позволяет пользоваться
сравнительно малочувствительным
указателем на выходе измерительной
цепи и регистрировать измеряемую
переменную величину самописцем или
вибратором осциллографа без предварительного
усиления.[3]
Существенно уменьшить погрешности и увеличить линейный участок характеристики позволяет применение дифференциальных преобразователей. Поэтому в практике индуктивные преобразователи всегда выполняются дифференциальными. На рисунке 6 показана схематическая конструкция преобразователя для измерения больших перемещений.
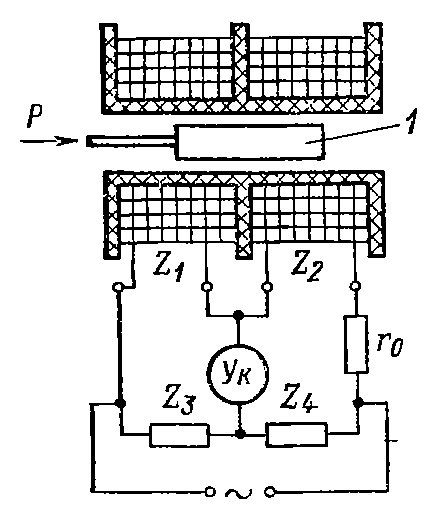
Рисунок 6 – Схематическая конструкция преобразователя
В
преобразователе происходит перемещение
сердечника 1 и при перемещении в
направлении стрелки – увеличение
сопротивления
 .
.
Наиболее
распространённой измерительной цепью
индуктивных преобразователей является
неравновесный измерительный мост, в
два плеча которого включены две половины
дифференциального преобразователя.
Оптимальным является включение
преобразователей параллельно источнику
и питание моста от источника напряжения.
Уравновешивание моста в начальном
положении (при отсутствии входной
величины), производится по двум
составляющим – изменением сопротивления
нерабочего плеча
 и изменением сопротивления
и изменением сопротивления включаемого в плечо, имеющее меньшее
активное сопротивление. Если при
включаемого в плечо, имеющее меньшее
активное сопротивление. Если при цепь была уравновешена, то при
цепь была уравновешена, то при через указатель потечёт ток, равный
через указатель потечёт ток, равный ,
где
,
где -приращение
электрической проводимости преобразователя.
-приращение
электрической проводимости преобразователя.
Ток
 сдвинут по фазе относительно напряжения
питания. Угол сдвига
сдвинут по фазе относительно напряжения
питания. Угол сдвига ,
если
,
если ,
и
,
и при
при ;
при согласовании сопротивления указателя
с выходным сопротивлением моста
;
при согласовании сопротивления указателя
с выходным сопротивлением моста .
Это обстоятельство необходимо учитывать
при наличии в измерительной цепи
фазочувствительных устройств.[6-9]
.
Это обстоятельство необходимо учитывать
при наличии в измерительной цепи
фазочувствительных устройств.[6-9]
По сравнению с другими преобразователями перемещения индуктивные преобразователи отличаются значительными по мощности выходными сигналами, простотой и надёжностью в работе.
Недостатком их является наличие обратного воздействия преобразователя на измеряемый объект (воздействие электромагнита на якорь) и влияние инерции якоря на частотную характеристику прибора.