3.2. Кинематический анализ звена
Для каждого звена механизма, в состав которого должны быть включены две кинематические пары, в каждый момент времени можно построить схему векторов скоростей и ускорений (рис. 3.3).

Рис. 3.3. Схема скоростей звена АВ
Абсолютные
скорости точек
![]() и
и![]() будут:
будут:
![]() ;
;
![]()
Примем:
![]() – полюс, в качестве которого целесообразно
принять центр масс звена;
– полюс, в качестве которого целесообразно
принять центр масс звена;![]() – связанная созвеном
система координат;
– связанная созвеном
система координат;
![]() – угол наклона звена. Зададим направление
потока движения
– угол наклона звена. Зададим направление
потока движения![]() и
т. д. Точка
и
т. д. Точка![]() будет началом звена 2, а точка
будет началом звена 2, а точка![]() – окончанием. Звено механизма
– окончанием. Звено механизма![]() может занимать различное положение на
плоскости, которое
определяется углом
может занимать различное положение на
плоскости, которое
определяется углом
![]() .
.
Тогда
проекции абсолютных скоростей точек
![]() и
и![]() на оси, связанной со звеном системы
координат, можно определить по формулам:
на оси, связанной со звеном системы
координат, можно определить по формулам:
![]()
![]()
![]()
![]()
Условие
постоянной длины звена
![]()
![]() дает:
дает:![]() – равенство составляющих скоростей
точек звена вдоль оси
– равенство составляющих скоростей
точек звена вдоль оси![]() .
.
Вместо
скоростей
![]() и
и![]() ,
распределение скоростей точек звена
,
распределение скоростей точек звена![]() можно охарактеризовать скоростью полюса
можно охарактеризовать скоростью полюса![]() и угловой скоростью вращения звена
вокруг полюса
и угловой скоростью вращения звена
вокруг полюса![]() ,
определяемой при помощи зависимостей:
,
определяемой при помощи зависимостей:
![]()
![]()
![]() .
.
Для ускорений имеем аналогичные зависимости:
![]()
![]() ;
;
![]()
![]()
![]()
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Вращательное ускорение определим так:
![]()
Кинематический анализ звена, охарактеризованный данными формулами, осуществляется с помощью программы ТММ20. Программа должна запускаться для каждого звена отдельно. Исходной информацией являются файлы rezO, rezA, … По запросу программы указываются:
имя точки начала звена;
имя точки конца звена;
номер звена.
Положение центра масс звена полагается заданным по середине его длины.
В
начале программы осуществляется контроль
постоянства длины звена :
![]() во всех состояниях механизма. Если это
условие не выполняется с приемлемой
точностью, то программа делает об этом
сообщение и снимается. Это означает,
что на этапе геометрического прочерчивания
координаты точек измерены неточно и их
следует исправить.
во всех состояниях механизма. Если это
условие не выполняется с приемлемой
точностью, то программа делает об этом
сообщение и снимается. Это означает,
что на этапе геометрического прочерчивания
координаты точек измерены неточно и их
следует исправить.
При успешном выполнении программы ТММ20 результаты анализа заносятся в файлы zveno1, zveno2, ……
Итак,
для каждого звена механизма
![]() с помощью программTMM10
и ТММ20
создается
кинематическая база данных, в которую
входят:
с помощью программTMM10
и ТММ20
создается
кинематическая база данных, в которую
входят:
1.
Геометрическое состояние механизма
(координаты начала и конца звеньев, углы
наклона
![]() ),
определяемое углом поворота
),
определяемое углом поворота![]() входного звена и задаваемое рядом
последовательных значений с шагом
входного звена и задаваемое рядом
последовательных значений с шагом![]() в пределах одного полного цикла работы
механизма.
в пределах одного полного цикла работы
механизма.
2.
Скорости и ускорения точек
![]() для каждого положения звена
для каждого положения звена
![]() ….
….
![]() .
.
Характеристики движения центра масс звеньев должны быть приведены в табл. 3.3.
Таблица 3.3
Ускорения центра масс звеньев
|
i |
Звено 1 |
Звено 2 | ||||||
|
|
|
|
|
|
|
|
| |
|
0 |
-17,8139 |
0 |
18,0084 |
0 |
-17,8139 |
0 |
18,0084 |
0 |
|
1 |
-15,205 |
-9,1434 |
17,971 |
-5,3645 |
-15,205 |
-9,1434 |
17,971 |
-5,3645 |
|
2 |
-9,2884 |
-15,1969 |
18,0042 |
7,7222 |
-9,2884 |
-15,1969 |
18,0042 |
7,7222 |
|
3 |
0,1288 |
-17,8788 |
18,0411 |
-2,3752 |
0,1288 |
-17,8788 |
18,0411 |
-2,3752 |
Окончание табл. 3.3
|
4 |
9,1435 |
-15,205 |
17,971 |
-5,3963 |
9,1435 |
-15,205 |
17,971 |
-5,3963 |
|
5 |
15,205 |
-9,1433 |
17,971 |
5,3327 |
15,205 |
-9,1433 |
17,971 |
5,3327 |
|
6 |
17,8788 |
-0,1286 |
18,0411 |
2,3101 |
17,8788 |
-0,1286 |
18,0411 |
2,3101 |
|
7 |
15,1969 |
9,2885 |
18,0042 |
-7,7542 |
15,1969 |
9,2885 |
18,0042 |
-7,7542 |
|
8 |
9,1433 |
15,205 |
17,971 |
5,3335 |
9,1433 |
15,205 |
17,971 |
5,3335 |
|
9 |
-0,0002 |
17,8139 |
18,0084 |
-0,3334 |
-0,0002 |
17,8139 |
18,0084 |
-0,3334 |
|
10 |
-9,1436 |
15,205 |
17,971 |
-5,4281 |
-9,1436 |
15,205 |
17,971 |
-5,4281 |
|
11 |
-15,1969 |
9,2881 |
18,0042 |
7,6585 |
-15,1969 |
9,2881 |
18,0042 |
7,6585 |
|
12 |
-17,8788 |
-0,1289 |
18,0411 |
-2,4078 |
-17,8788 |
-0,1289 |
18,0411 |
-2,4078 |
|
i |
Звено 3 |
Звено 4 | ||||||
|
|
|
|
|
|
|
|
| |
|
0 |
-1,5717 |
16,9238 |
-0,1313 |
119,5074 |
12,4354 |
-23,0062 |
-1,1722 |
33,8402 |
|
1 |
-14,1307 |
-3,215 |
2,0464 |
52,0399 |
-19,5399 |
-20,0742 |
-0,5457 |
36,9312 |
|
2 |
-14,4616 |
-35,6401 |
2,9629 |
-169,818 |
-38,9543 |
-10,7409 |
0,233 |
24,8224 |
|
3 |
-0,3607 |
-52,8368 |
0,0095 |
-381,763 |
-35,7411 |
-4,0881 |
0,8718 |
12,4501 |
|
4 |
-14,4346 |
-35,6709 |
-2,9591 |
-170,188 |
-21,3793 |
0,7761 |
1,2213 |
1,5880 |
|
5 |
-14,1306 |
-3,2315 |
-2,0464 |
52,0402 |
-8,5813 |
7,2517 |
1,2501 |
-10,6608 |
|
6 |
-1,6703 |
16,7870 |
0,1350 |
119,1069 |
0,5084 |
14,2521 |
0,9759 |
-23,4264 |
|
7 |
10,0324 |
20,9841 |
1,0511 |
90,0785 |
5,9194 |
17,9329 |
0,4804 |
-29,9674 |
|
8 |
12,1350 |
17,9315 |
0,6880 |
60,1371 |
13,1281 |
16,8892 |
-0,1040 |
-28,9080 |
|
9 |
11,6206 |
16,6257 |
0 |
54,0699 |
39 |
3,9480 |
-0,7503 |
-21,8327 |
|
10 |
12,1350 |
17,9315 |
-0,6880 |
60,1371 |
4,4479 |
13,2539 |
-1,1774 |
-9,2567 |
|
11 |
10,0324 |
20,9841 |
-1,0511 |
90,0784 |
49,4746 |
-15,7501 |
-1,2985 |
16,9411 |
|
12 |
-1,6703 |
16,7870 |
-0,1350 |
119,1072 |
-146,303 |
67,9577 |
-0,1929 |
31,8211 |
|
i |
Звено 5 |
| ||||||
|
|
|
|
|
|
|
|
| |
|
0 |
13,8858 |
29,6375 |
-0,084 |
-60,7561 |
|
|
|
|
|
1 |
-1,793 |
2,593 |
1,4186 |
-0,7121 |
|
|
|
|
|
2 |
-21,7449 |
-51,5729 |
1,9966 |
128,791 |
|
|
|
|
|
3 |
-31,3605 |
-94,7766 |
0,0065 |
193,3712 |
|
|
|
|
|
4 |
-21,7652 |
-51,5729 |
-1,9939 |
128,9144 |
|
|
|
|
|
5 |
-1,793 |
2,5931 |
-1,4186 |
-0,7124 |
|
|
|
|
|
6 |
13,8109 |
29,4699 |
0,0868 |
-60,2468 |
|
|
|
|
|
7 |
12,6009 |
30,1544 |
0,7218 |
-84,9193 |
|
|
|
|
|
8 |
9,3782 |
20,2422 |
0,4557 |
-54,1261 |
|
|
|
|
|
9 |
10,7778 |
23,2936 |
0 |
-65,4162 |
|
|
|
|
|
10 |
9,3782 |
20,2422 |
-0,4557 |
-54,126 |
|
|
|
|
|
11 |
12,6009 |
30,1544 |
-0,7218 |
-84,9194 |
|
|
|
|
|
12 |
13,811 |
29,47 |
-0,0868 |
-60,2471 |
|
|
|
|
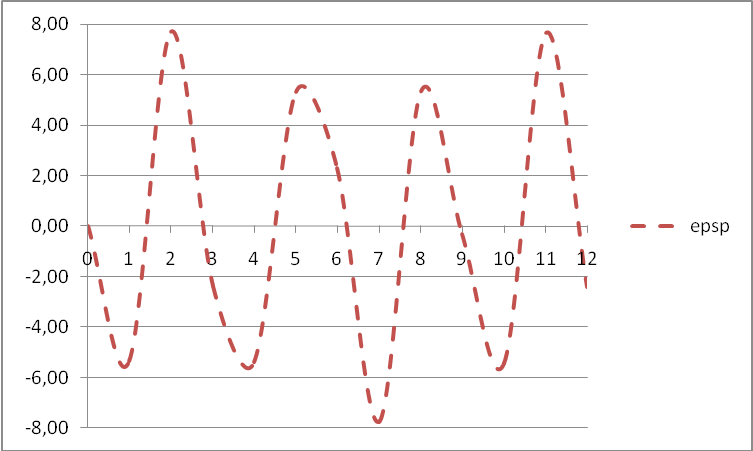
По данным табл.
3.3 или файлов результатов кинематического
анализа вычерчиваются графики:
![]() ;
;![]() ;
;![]() ;
;![]() ;
для звеньев, характер движения которых
представляет интерес. Это устанавливается
по согласованию с руководителем проекта.
;
для звеньев, характер движения которых
представляет интерес. Это устанавливается
по согласованию с руководителем проекта.
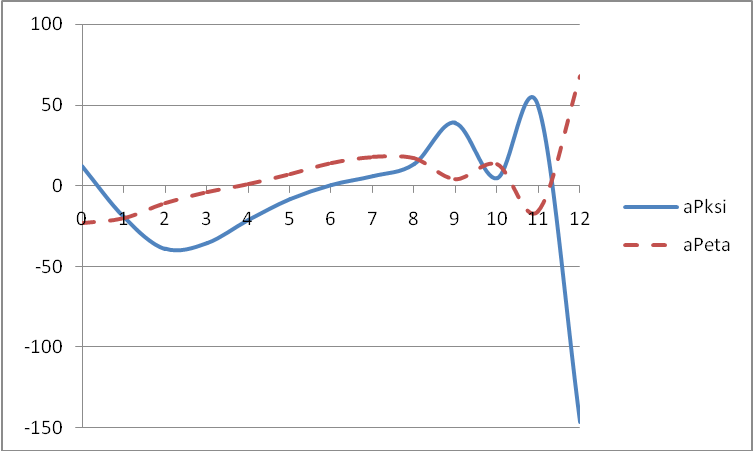
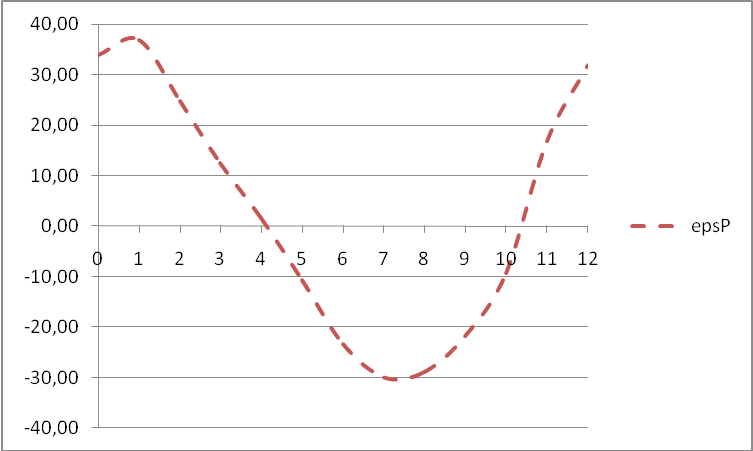
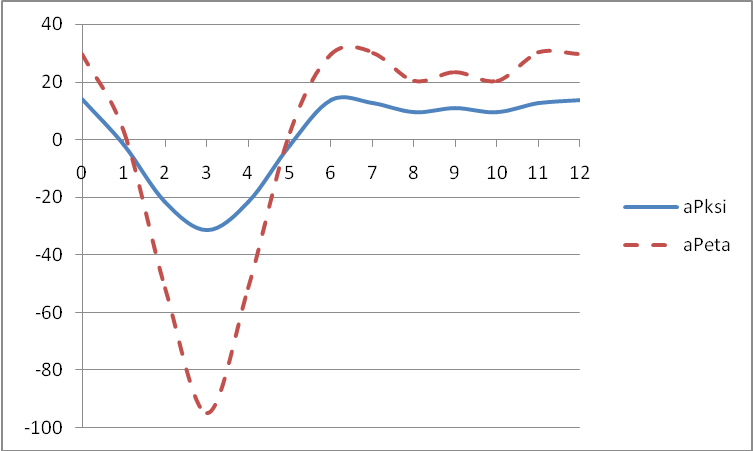
Пример графиков скоростей и ускорений показан на рис. 3.4.
|
|
|
|
Ускорение полюса |
Угловая скорость |
|
| |
|
Угловое ускорение | |
|
Звено 1 | |
|
|
|
|
Ускорение полюса |
Угловая скорость |
|
| |
|
Угловое ускорение | |
|
Звено 2 Рис. 3.4. Графики ускорений, угловой скорости вращения звена:
| |
|
|
|
|
Ускорение полюса |
Угловая скорость |
|
| |
|
Угловое ускорение | |
|
Звено 3 | |
|
|
|
|
Ускорение полюса |
Угловая скорость |
|
| |
|
Угловое ускорение | |
|
Звено 4 (Продолжение) Рис. 3.4. Графики ускорений, угловой скорости вращения звена:
| |
|
|
|
|
Ускорение полюса |
Угловая скорость |
|
| |
|
Угловая скорость | |
|
Звено 5 | |
|
(Окончание) Рис. 3.4. Графики ускорений, угловой скорости вращения звена:
| |