

3. Аналитический метод кинематического и силового анализа плоского рычажного механизма
3.1. Кинематический анализ
Особенностью рычажных механизмов является то, что для каждого положения входного (ведущего) звена путем геометрических построений можно определить соответствующие положения всех других звеньев. Эти построения основываются на том, что стержни являются жесткими, т. е. имеют неизменную геометрическую форму и длину. В качестве единственного определяющего параметра принимается угол поворота входного звена, либо линейное перемещение при поступательном характере движения входного звена.
Рассмотрим
следующий метод. Графическая его часть
состоит в геометрическом прочерчивании
положения звеньев механизма при
последовательном вращении входного
звена с некоторым шагом
![]() в пределах его изменения на протяжении
одного полного рабочего цикла (рис.
3.1). Шаг
в пределах его изменения на протяжении
одного полного рабочего цикла (рис.
3.1). Шаг![]() примем
равным
примем
равным
![]() .
.
На
чертеже отмечаются положения характерных
точек звеньев механизма
![]() .
Для каждой характерной точки измеряют
их координаты
.
Для каждой характерной точки измеряют
их координаты![]() и заносят в табл. 3.1, предварительно
пересчитав их в натуральные размеры.
и заносят в табл. 3.1, предварительно
пересчитав их в натуральные размеры.
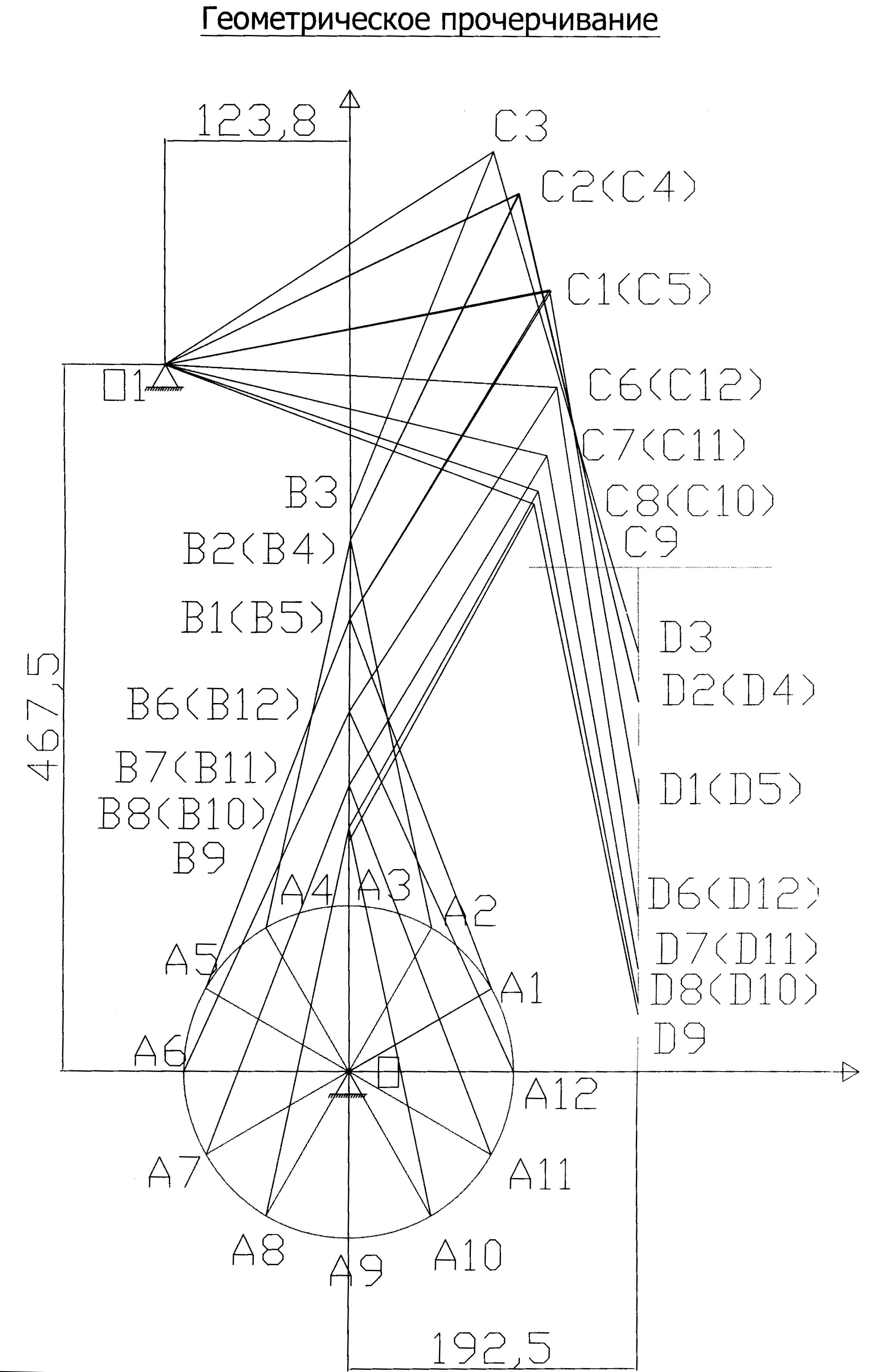
Рис. 3.1. Прочерчивание положений звеньев механизма
Для
аппроксимации траекторий кинематических
пар квадратичным полиномом достаточно
будет точек
![]() .
.
При постоянной угловой скорости вращения входного звена в i-м положении находим
![]() ;
;
![]() ;
;![]() .
.
Для
многих механизмов степень неравномерности
угловой скорости не превышает
![]() ,
и для первого приближения неравномерностью
,
и для первого приближения неравномерностью![]() можно пренебречь.
можно пренебречь.
По
данным табл. 3.1 координат в качестве
проверки данных можно построить
траектории движения точек:
![]() ;
;![]() ;
;![]() .
.
Таблица 3.1
Координаты кинематических пар
|
№ положения
|
Угол
поворота
|
Время
|
|
|
|
|
|
|
|
-1 |
-0,523 |
-0,0278 |
0,095 |
-0,055 |
0 |
0,1895 |
0,1316 |
0,4080 |
|
0 |
0 |
0 |
0,110 |
0 |
0 |
0,2384 |
0,1380 |
0,4529 |
|
1 |
0,523 |
0,0278 |
0,095 |
0,055 |
0 |
0,2996 |
0,1333 |
0,5173 |
|
2 |
1,046 |
0,0556 |
0,055 |
0,095 |
0 |
0,3521 |
0,1127 |
0,5809 |
|
3 |
1,569 |
0,0833 |
0 |
0,110 |
0 |
0,3725 |
0,0957 |
0,6089 |
|
4 |
2,092 |
0,1111 |
-0,055 |
0,095 |
0 |
0,3521 |
0,1127 |
0,5809 |
|
5 |
2,615 |
0,1389 |
-0,095 |
0,055 |
0 |
0,2996 |
0,1333 |
0,5173 |
|
6 |
3,138 |
0,1667 |
-0,110 |
0 |
0 |
0,2384 |
0,1380 |
0,4529 |
|
7 |
3,661 |
0,1944 |
-0,095 |
-0,055 |
0 |
0,1895 |
0,1316 |
0,4080 |
|
8 |
4,184 |
0,2222 |
-0,055 |
-0,095 |
0 |
0,1614 |
0,1258 |
0,3845 |
|
9 |
4,707 |
0,2500 |
0 |
-0,110 |
0 |
0,1525 |
0,1231 |
0,3758 |
|
10 |
5.230 |
0,2778 |
0,055 |
-0,095 |
0 |
0,1614 |
0,1258 |
0,3845 |
|
11 |
5,753 |
0,3056 |
0,095 |
-0,055 |
0 |
0,1895 |
0,1316 |
0,4080 |
|
12 |
6,283 |
0,3333 |
0,110 |
0 |
0 |
0,2384 |
0,1380 |
0,4529 |
|
13 |
6,806 |
0,3611 |
0,095 |
0,055 |
0 |
0,2996 |
0,1333 |
0,5173 |
|
Продолжение табл. 3.1 | ||||||||
|
№ положения
|
Угол
поворота
|
Время
|
|
|
|
|
|
|
|
-1 |
-0,523 |
-0,0278 |
0,1925 |
0,06848 |
0 |
0 |
0,1235 |
0,4675 |
|
0 |
0 |
0 |
0,1925 |
0,1038 |
0 |
0 |
0,1235 |
0,4675 |
|
1 |
0,523 |
0,0278 |
0,1925 |
0,1781 |
0 |
0 |
0,1235 |
0,4675 |
|
2 |
1,046 |
0,0556 |
0,1925 |
0,2459 |
0 |
0 |
0,1235 |
0,4675 |
|
3 |
1,569 |
0,0833 |
0,1925 |
0,2777 |
0 |
0 |
0,1235 |
0,4675 |
|
4 |
2,092 |
0,1111 |
0,1925 |
0,2459 |
0 |
0 |
0,1235 |
0,4675 |
|
5 |
2,615 |
0,1389 |
0,1925 |
0,1781 |
0 |
0 |
0,1235 |
0,4675 |
|
6 |
3,138 |
0,1667 |
0,1925 |
0,1038 |
0 |
0 |
0,1235 |
0,4675 |
Окончание табл. 3.1
|
7 |
3,661 |
0,1944 |
0,1925 |
0,0684 |
0 |
0 |
0,1235 |
0,4675 |
|
8 |
4,184 |
0,2222 |
0,1925 |
0,0460 |
0 |
0 |
0,1235 |
0,4675 |
|
9 |
4,707 |
0,2500 |
0,1925 |
0,0385 |
0 |
0 |
0,1235 |
0,4675 |
|
10 |
5,230 |
0,2778 |
0,1925 |
0,0460 |
0 |
0 |
0,1235 |
0,4675 |
|
11 |
5,753 |
0,3056 |
0,1925 |
0,0684 |
0 |
0 |
0,1235 |
0,4675 |
|
12 |
6,283 |
0,3333 |
0,1925 |
0,1038 |
0 |
0 |
0,1235 |
0,4675 |
|
13 |
6,806 |
0,3611 |
0,1925 |
0,1781 |
0 |
0 |
0,1235 |
0,4675 |
Скорости и ускорения кинематических пар механизма определим дифференцированием координат по времени
![]()
![]() .
.
Процедуру
дифференцирования осуществим аналитическим
методом, предварительно выполнив
аппроксимацию функций
![]() ,
,![]() .
Для аппроксимации траекторий можно
использовать, например, степенной
многочлен не ниже второй степени.
.
Для аппроксимации траекторий можно
использовать, например, степенной
многочлен не ниже второй степени.
Пошаговым способом, продвигаясь по таблице данных координат, найдем искомые скорости и ускорения контрольных точек.
Для задач курсового проектирования применим учебную программу ТММ00 для преобразования табл. 3.1 в файлы координат кинематических пар и программу ТММ10 для расчета характеристик их движения.
Программа ТММ00 предназначена для создания файлов координат всех кинематических пар и запускается для каждой точки отдельно.
По запросу программы указываются:
O, A, B, О1,….. – имя кинематической пары;
n, об/c – частота вращения входного звена механизма;
 ,
, .–
координаты названной кинематической
пары из табл. 3.1
.–
координаты названной кинематической
пары из табл. 3.1
По окончании ввода программа самостоятельно создает соответствующий файл координат (tockaO; tockaA, ….). Эти файлы служат исходной информацией для последующих расчетов.
Программа ТММ10 выполняет аппроксимацию траектории точки и расчет кинематических параметров ее движения. Программа запускается для каждой точки отдельно.
Должен быть установлен класс каждой кинематической пары. Ползун вместе с кинематической парой его соединения с рычажным звеном определяется как одна пара 4-го класса.
По запросу программы указываются:
O, A, B, О1,….. – имя кинематической пары;
 – класс кинематической пары;
– класс кинематической пары; – угол наклона оси ползуна по отношению
к оси
– угол наклона оси ползуна по отношению
к оси .
.
Результаты расчета выводятся на экран, а также в соответствующий точке файла (rezO,rezA, ……).
Скорости и ускорения контрольных точек должны быть приведены в табл. 3.2.
Таблица 3.2