

будет увеличиваться β& , будет возрастать и гироскопический момент MгZн , а значит, будет возрастать ускорение α&& и, как следствие, и скорость вращения гироскопа α& , вследствии чего будет увеличиваться и гироскопический момент МгY. Этот процесс будет продолжаться до тех пор, пока МгY не станет равным МY. В момент равенства нулю разности моментов МY и МгY увеличение скорости β& прекращается.
Однако постоянной скорости β& будет соответствовать постоянный MгZн, а, следовательно, конечное ускорение α&& и увеличивающаяся скорость α& и возрастающий гироскопический момент МгY. Теперь он станет большим МY, величина скорости β& начнет уменьшаться и движение гиро-
скопа вокруг оси ОYр будет замедляться.
В результате этого в некоторый момент времени движение гироскопа вокруг оси OYр сначала прекращается, а потом начинается его движение вокруг оси ОYр в обратном направлении в силу MгY > MY. Гироскопический момент MгZн изменит свое направление. Рост скорости α& прекратится, гироскопический момент МгY начнет уменьшаться и т.д.
Таким образом, сразу же после приложения момента внешних сил МY по оси внутренней рамки возникает колебательное движение главной оси
гироскопа вокруг осей ОYр и ОZн со скоростями β& и α& , называемое нута-
ционным.
Нутационные колебания происходят с большой частотой и малой амплитудой и при решении основных технических задач не учитываются.
Возникшие нутационные колебания достаточно быстро затухают из-за трения в подшипниках по осям подвеса, а также из-за трения о воздух и остается только прецессионное движение главной оси гироскопа ωпZн=MY/Hcosβ , рассмотренное ранее.
1.4. Уравнения движения трехстепенного гироскопа в кардановом подвесе
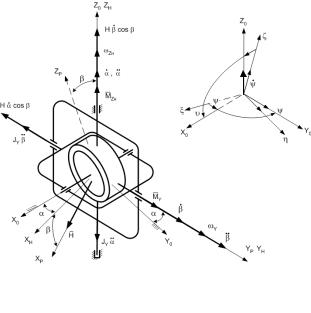
Рассмотрим движение трехстепенного гироскопа под действием моментов внешних сил МZн и МY с учетом инерции элементов карданова подвеса гироскопа. Положим при этом для общности, что гироскоп движется
со скоростями α& и β& , в соответствии со знаками приложенных моментов
и что эти скорости не постоянны, т.е. имеют место ускорения, как показано на рис. 9. Будем считать систему координат ОХ0Y0Z0, связанную с основанием, неподвижной в абсолютном пространстве.
16
а) |
|
б) |
|
|
|
ωz0
ωy0
υ
z
Рис. 9
Положение гироскопа относительно неподвижной системы координат ОХ0Y0Z0 в каждый момент времени определяется углами α и β. Скорости и
ускорения движения гироскопа соответственно равны: α& и α&& ; β& и β&&.
Вывод уравнений движения гироскопа проводится при соблюдении условий
β& <<Ω и α& <<Ω.
Рассмотрим сначала схему моментов, действующих, например, по оси ОYр. Очевидно, что, во-первых здесь действует в отрицательном направ-
лении момент инерционных сил MисY=IY β&&, где IY – момент инерции гиро-
узла (внутренней рамы и ротора) относительно оси ОYр. Во-вторых, вокруг оси ОYр действует в отрицательном направлении гироскопический
момент MгY=H α& sin(H^α)=H α& cosβ.
Аналогично относительно оси ОZн действует в отрицательном направлении момент инерционных сил сопротивления MиZн = IZ α&& , а также гиро-
скопический момент MгZн = Hβ& cosβ, направленный в положительном
направлении оси ОZ0. Здесь IZ – момент инерции всех элементов подвеса (наружной, внутренней рам и ротора) относительно оси ОZн.
Направления гироскопических моментов определяем в соответствии со сформулированным ранее правилом.
17

Приближенные упрощенные уравнения равновесия моментов по осям подвеса OZн и OYр:
&& |
& |
(1.1) |
IZ α − Hβcosβ = MZн ; |
||
&& |
& |
|
IYβ + Hαcosβ = MY . |
|
|
Поясним физическое содержание полученных уравнений. Здесь в каждом случае момент внешних сил преодолевает момент сил инерции и гироскопический момент. Знак "минус" в первом уравнении по-прежнему означает, что положительный момент внешних сил вызывает отрицательную скорость прецессии. Отсюда при подстановке в первое уравнение скорости прецессии, обусловленной внешним моментом, получим противодействующий внешнему моменту гироскопический момент. Таким образом, сформулированное ранее свойство триединства и здесь не нарушается. Уравнения (1) и (2) нелинейные, так как IZ≠const и cosβ≠const, и найти их точное решение невозможно.
Для упрощения анализа движения главной оси гироскопа предположим, что β мал, т.е. cosβ=1. Положим также IY=const и IZ=const. Тогда, при условии MZн=0 и MY=0, свободное движение главной оси гироскопа определяется системой уравнений:
|
&& |
& |
|
; |
|
(1.2) |
|
IY β+ Hα = 0 |
|
||||
|
&& |
& |
|
|
|
|
|
IZ α − Hβ = 0 . |
|
|
|||
& |
&& |
&& |
&&& |
|
/ H . |
Подставляя в уравнение |
Отсюда следует: β = αIZ / H и |
β = αIZ |
|||||
(1.2) получим дифференциальное уравнение движения главной оси вокруг оси Zн
IY IZ |
α+ Hα = 0 . |
(1.3) |
H |
||
|
&&& & |
|
Аналогично может быть найдено дифференциальное уравнение, определяющее свободное движение главной оси гироскопа вокруг оси Y его рамки.
Обозначим собственную частоту колебаний гироскопа через ν и уравнение (1.3) в канонической форме:
&&& |
H 2 |
& |
&&& |
2 & |
|
|
α + |
IY IZ |
α = 0 |
; α +ν |
α = 0 |
, |
(1.4) |
где ν = H 2 / IY IZ = H / |
IY IZ . |
|
|
|
|
|
18

Решим |
уравнение |
(1.4): α = A e |
pt |
& |
|
pt |
&& |
2 |
e |
pt |
и |
|
|
, тогда α = Ape |
|
, α = Ap |
|
|
|||||||
&&& |
3 pt |
. Отсюда соответствующее характеристическое уравнение име- |
||||||||||
α = Ap e |
||||||||||||
ет вид |
p3 + ν2 p = 0 . |
|
|
|
|
|
|
|
|
|
|
|
Корни этого алгебраического уравнения равны: |
p1 = 0 ; |
p2 = ± jν . Сле- |
||||||||||
довательно |
решение |
уравнения (1.4) |
имеет вид |
α = A1 + B1 cos(νt +ϕ1) . |
||||||||
Аналогично движение главной оси гироскопа вокруг оси его внутренней рамки определяется уравнением β = A2 + B2 cos(νt +ϕ2 ) .
Окончательно свободное движение главной оси гироскопа вокруг двух взаимно перпендикулярных осей имеет вид
α = A1 + B1 cos(νt +ϕ1) , β = A2 + B2 cos(νt +ϕ2 ) .
Коэффициенты A1, A2, B1, B2 зависят от начальных условий. Учитывая,
что ϕ −ϕ |
2 |
= π |
2 |
и полагая ϕ = ϕ , получаем |
|
1 |
|
1 |
|
||
|
|
α = A1 + B1 cos(νt +ϕ) , β = A2 + B2 sin(νt +ϕ) . |
(1.5) |
||
Из системы уравнений (1.5) следует, что свободное движение главной оси гироскопа колебательное. В силу B1≠B2 конец главной оси описывает в пространстве эллипс, назаваемый апексом. Эти колебательные движения главной оси гироскопа называются нутацией. Физический смысл этих ко-
лебаний объяснен ранее. Частота нутационных колебаний ν = H / IY IZ очень высока. В самом деле, если положим , что экваториальные моменты
IY=IZ равны моменту инерции ротора, т.е. IY=IZ=I, то ν = IΩ/  I 2 = Ω и частота нутационных колебаний очень высока. Чем выше частота нутационных колебаний, тем меньше их амплитуда.
I 2 = Ω и частота нутационных колебаний очень высока. Чем выше частота нутационных колебаний, тем меньше их амплитуда.
Таким образом, под действием импульса возмущающего момента (толчки, неравномерность трения в подшипниках) главная ось гироскопа колеблется с очень высокой частотой и очень малой амплитудой. В силу последнего ими часто пренебрегают на практике.
К сожалению, это пренебрежение не всегда оправдано. Так, частота нутаций может совпадать с собственными частотами колебаний конструктивных элементов гироскопа, тогда возможно появление ощутимых уходов оси гироскопа от исходного положения.
Нутационные движения сильно затухают из–за трения в подшипниках, сопротивления воздуха и других сил рассеивания.
Если пренебречь нутационными движениями главной оси гироскопа, что связано с пренебрежением инерционными членами в уравнениях (1) и (2), то получим усеченные уравнения движения гироскопа, в основном, и используемые в технике:
19