

на двух степенных шарикоподшипниковых гироскопах окажется вполне приемлемой.
3.2.2. Поплавковый гироскоп
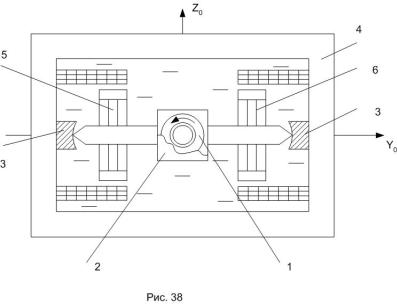
Поплавковый гироскоп является конструктивной разновидностью двухстепенного интегрирующего гироскопа. Его схема представлена на рис.38.
П
рибор состоит из махо вика
1,
разме- щенн ого в герме- тичн
ом кожухе
2,
выполняющем функции внутренней рамки. Ось рамки смонтирована в подшипниках 3, изготовленных из камней типа агата и рубина, как в часовых механизмах. Тем самым гироскоп имеет две угловых степени свободы: вращение маховика вокруг оси Х (перпендикулярно плоскости чертежа), а также вращение маховика вместе с рамкой 2 вокруг оси Y. Гироузел смонтирован в герметичном корпусе 4, полость которого заполнена специальной, тяжелой, вязкой (как свежий мед) жидкостью. Следовательно, на гироблок в данном приборе действует выталкивающая сила. Параметры гироблока и жидкости выбираются такими, чтобы гироблок в жидкости пребывал в безразличном состоянии. Тем самым обнуляется давление гироблока на опоры, и, следовательно, минимизируется трение в них. Теоретически оно должно быть равным нулю. В самом деле, в силу технологических допусков процесса изготовления, полного обнуления
87
давления не происходит, не происходит и полного обнуления трения в опорах.
Дополнительно прибор оснащается преобразователем угловых перемещений в электрический сигнал 5, а также моментным датчиком 6.
С целью обеспечения постоянства поплавкового эффекта в диапазоне температур обеспечивается и постоянство вязкости жидкости в приборе. Это достигается ее термостабилизацией. Погрешность термостабилизации на превышает 0,1° . Термостабилизация осуществляется подогревом жидкости до температуры, несколько превышающей максимальную рабочую температуру окружающей среды. При такой организации термостабилизации упрощается и она сама. Система работает лишь на подогрев, восполняя перепад температур между температурой окружающей среды и максимальной температурой термостабилизации. Вязкость жидкости соответствует вязкости «молодого» меда.
Жидкость в приборе не только разгружает опоры, но и обеспечивает необходимое вязкое трение поворотному движению гироузла. Тем самым исключается необходимость в демпферах.
Применение жидкостного подвеса, наряду с уменьшением трения, увеличивает перегрузочную способность прибора. Это происходит из-за одинакового увеличения веса поплавка и жидкости при воздействии перегрузок. Тем самым линейные ускорения практически не увеличивают давления на опоры прибора.
Иначе ведет себя прибор при угловых эволюциях основания. Здесь возможны большие перегрузки. В самом деле при угловых движениях основания, например, вокруг оси 0Y возникают гироскопические моменты, действующие на опоры и полуоси. Эти нагрузки могут быть очень большими и приводить к изгибу и даже излому полуосей. Это обстоятельство заставляет использовать в поплавковых гироскопах роторы с малыми кинетическими моментами.
Введение поплавкового подвеса существенно повысило точность гироскопа, но не сделало его идеальным. Появились иные проблемы, такие как неравномерность нагрева жидкости по объему, возбуждающая ее циркуляцию, остаточная неуравновешенность гироузла и т.д. Эти проблемы требуют более высокого технологического уровня изготовления прибора. По этой причине они и дороги.
Масса поплавковых гироскопов составляет 0,1-3 кг, а их уходы лежат в пределах 0,01-5°/час.
Таким образом, поплавковые гироскопы позволяют существенно увеличить точность гироскопических систем за счет уменьшения трения в подвесе по оси прецессии прибора. Однако, как и в случае с ДИГ, здесь не представляется возможным исключить кинематическую ошибку.
88
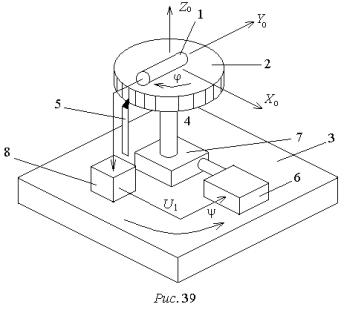
Для реализации высокой точности, принципиально присущей поплавковым приборам, их используют обычно по схемам нульиндикаторов в компенсационных схемах измерения углов поворота основания. Одна из таких схем представлена на рис.39.
Здесь
поплавковый гироскоп 1 монтируется на подвижной платформе 2. Платформа с гироскопом может поворачиваться вокруг оси 0Z0 основания 3 - посредством электродвигателя 6 через редуктор 7, смонтированных на основании. На ободе платформы 2 размещена шкала 4, а с основанием 3 связан указатель 5. Преобразователь угловых перемещений гироскопа связан электрически через усилитель 8 с электродвигателем 6. Принцип действия прибора прост.
Поворот основания 3 вокруг оси 0Z0 на угол ψ ≈ 0 из-за механической связи через редуктор 7 приводит к такому же повороту и платформы 2. В результате на выходе гироскопа появляется электрический сигнал U, который усиливается усилителем 8 и подается на электродвигатель 6. Последний через редуктор разворачивает платформу 2 относительно
платформы 3 в противоположном направлении со скоростью ϕ& = ψ& . В
результате платформа 2 остается неподвижной относительно оси 0Z0. 89