

условии pV≠0 инвариантность (невозмущаемость) гировертикали к действию линейных ускорений наблюдается при условии:
|
KмдK1Ku |
− |
1 |
|
= 0 или |
KмдK1Ku |
= |
g |
. |
||
|
gH |
R |
|
H |
R |
||||||
|
|
|
|
|
|
|
|||||
|
|
|
З |
|
|
|
|
|
З |
|
|
Следовательно q = |
KмдK1Ku |
= |
g |
. |
|
|
|
||||
|
H |
|
R |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
З |
|
|
|
|
Таким образом для обеспечения нечувствительности гировертикали к линейным ускорениям, возникающим при движении объекта, необходимо собственную частоту колебаний гировертикали выбирать из условия
q = |
K |
мд K |
1 Ku |
= |
g |
|
H |
|
. Отсюда период колебаний такой, невоз- |
||
|
|
|
|
RЗ |
мущающейся линейным ускорением, вертикали определится соотношени-
ем: T = |
2π |
= 2π |
RЗ |
= 84,3 мин. Это условие невозмущаемости |
|
g |
g |
||||
|
|
|
гировертикали к линейным ускорениям движения основания было впервые сформулировано Максом Шулером. Отсюда и название «период Шулера».
Собственное движение гировертикали определяется простым соотно-
••
шением: α+ q2 α = 0 . Это уравнение колебательного звена. Его реше-
ние имеет вид α = C1cos(qt + ϕ). При нулевых начальных условиях C1 = 0 и, следовательно, α = 0. Тем самым ошибка в каждый момент времени при любых ускорениях равна нулю.
У реальных приборов имеются различные причины, обуславливающие C1 ≠ 0. По этой причине в неидеализированных приборах необходимо демпфирование собственных колебаний. Оно осуществляется введением корректирующей цепи в канал сигнала коррекции.
2.4. Гироинтеграторы
Гироинеграторы предназначены для измерения линейных скоростей движения оснований. Центр масс таких гироскопов смещен относительно точки подвеса, т. е. в качестве гироинтеграторов используются статические гироскопы. Известны различные реализации гироинтеграторов. Две наиболее распространенные схемы представлены на рис. 30а, б.
67
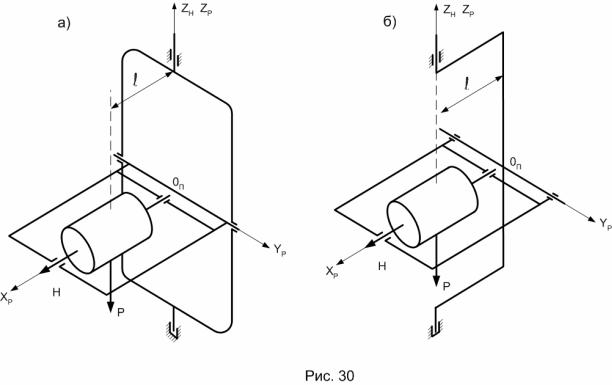
Как видно из рис. 30, в обоих случаях центр масс гироинтегратора
смещен относительно оси 0YР в направлении главной оси на величину l. Отличие этих подвесов состоит в возможности обеспечения большей точности устройства, представленного на рис. 30б, т. е. когда центр масс гироузла совмещен с осью наружной рамки, а ось внутренней рамки
смещена на величину l.
В обоих случаях момент маятника составляет величину M = mg l. Принцип действия гироинтегратора рассмотрим на примере схемы
прибора, представленного на рис. 31.
68
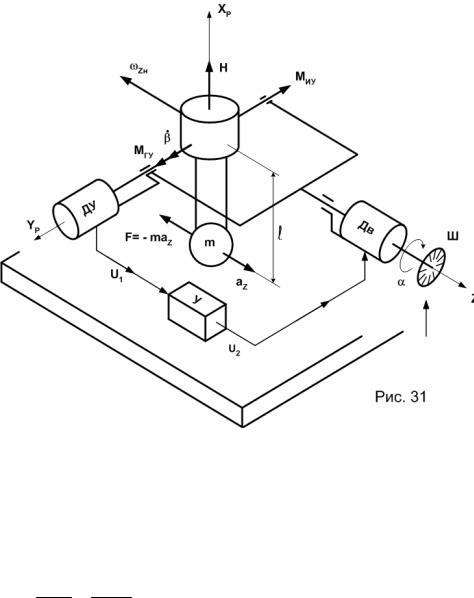
Положим, что ось 0ZН этого прибора лежит в плоскости горизонта и совмещена с направлением движения основания. В случае движения основания с ускорением az на гироузел прибора, как следует из рис. 31, дейст-
вует сила инерции Fu = -maz. На плече l она создает момент силы MИУ =
maz l, если считать, что начальное положение главной оси гироскопа вертикально. Под действием MИУ гироскоп прецессирует вокруг оси 0ZН с
такой скоростью ωПZН , что возникающий вследствие прецессии гироскопический момент Mгу компенсирует момент сил инерции. Отсюда
ωПZН = MHИУ = mHlaz . Если угол поворота гироскопа вокруг оси 0ZН
69
обозначить через α, то получим ω |
ПZН |
= α& = |
mlaz |
. Отсюда найдем |
|||
|
|||||||
|
|
|
|
|
H |
||
α = ml |
|
∫t |
|
|
|
||
az dt . Так как интеграл от ускорения равен линейной ско- |
|||||||
H |
|
0 |
|
|
|
|
|
рости, то α = mHlV .
Следовательно, в идеальном случае угол α поворота наружной рамки такого прибора пропорционален скорости движения основания, на котором установлен прибор.
Информация о скорости здесь снимается со шкалы Ш, отградуированной в единицах линейной скорости.
Градуировка осуществляется посредством воздействия на прибор ускорения силы тяжести. Для этого прибору создается соответствующее наклонное положение, при котором момент, обусловленный ускорением силы тяжести, может быть точно определен в каждой точке калибровочной характеристики.
Рассмотренный принцип действия гироинтегратора соответствует случаю идеализированного прибора:
-трение по осям подвеса равно нулю;
-ось чувствительности прибора, ось 0ZН, лежит в плоскости местного горизонта;
-главная ось гироскопа (вектор H ) совмещена с местной вер-
тикалью.
В неидеализированных приборах эти условия часто не выдерживаются. Как во всех случаях практических приборов трение по оси не бывает равным нулю. Это приводит, при движении гироскопа вокруг оси 0ZН, к по-
•
явлению момента трения MтрZ = -MтрZ sin α . Учитывая, что угловая
•
скорость α в среднем знакопостоянна, можно допустить MтрZ = -MтрZ = const. Под действием этого момента гироскоп прецессирует вокруг оси
внутренней рамки в сторону совмещения H с MтрZ по кратчайшему пути,
т.е. с угловой скоростью β• = MHтрZ . Главная ось гироскопа перестает
быть вертикальной и действующему на гироскоп моменту сил инерции MИУ добавляется составляющая момента, обусловленного маятниково70
стью, и равная mg lsinβ, вызывающая ошибки в измерении ускорения az. При этом причиной ошибок является не только чувствительность гироскопа к дополнительной составляющей момента, обусловленного маятниковостью, но и изменение коэффициента передачи прибора из-за
изменения эффективного значения плеча приложения силы lэф = lcosβ. Для устранения этих ошибок в приборе предусмотрена межрамочная коррекция. Она осуществляется контуром, состоящем из датчика угла ДУ, усилителя У и двигателя Дв. В самом деле, как только, в силу прецессии гироузла вокруг оси 0YР угол β перестанет быть равным нулю, то сразу же появится на выходе ДУ сигнал U1 = Kβ, где K - коэффициент передачи ДУ. Он усиливается усилителем У и подается на двигатель Дв. Последний развивает по оси 0ZН момент, вызывающий встречную прецессию гироскопа вокруг оси 0YР. В результате гироскоп удерживается в положении, при
котором β близко к нулю.
Как следует из текста выше, причиной ошибок гироинтегратора может стать и негоризонтальность его измерительной оси 0ZН. В этом случае прибор становится чувствительным к ускорению силы тяжести. Дополнительно он начинает измерять не ускорение az, а лишь ее проекцию на измерительную ось. Для устранения этой ошибки прибор располагают либо на стабилизированной платформе, если объект не стабилизирован, либо вычисляют ошибки по величине угла негоризонтальности оси чувствительности и учитывают их.
Межрамочная коррекция в гироинтеграторах может быть и релейной.
В этом случае измерителем неперпендикулярности H и оси 0ZН является датчик с релейной характеристикой. В случае релейной межрамочной коррекции главная ось гироскопа постоянно прецессирует относительно положения, перпендикулярного плоскости наружной рамки.
Представляется интересным здесь еще один момент. Из математиче-
ской модели α = mHlV следует, что чувствительность прибора тем
больше, чем меньше кинетический момент гироскопа H . Так обычно и поступают в случае гироинтеграторов, где роторы гироузлов делаются сравнительно маленькими и легкими. Однако на этом пути повышения чувствительности имеются и серьезные ограничения.
Дело в том, что упомянутая выше математическая модель прибора не совсем точна. Здесь не учтены инерционные члены, т. е. не учтены неизбежные нутационные колебания. Уменьшение кинетического момента, как известно, сопровождается уменьшением частоты собственных колебаний гироскопа, увеличением амплитуды этих колебаний. Так что нутаци-
71