

последовательность значений искомой решетчатой функции на последователь-
ных тактах: y[0]=c0, y[1]=c1, y[2]=c2 ...
Лекция 10. Передаточные функции импульсных звеньев и систем
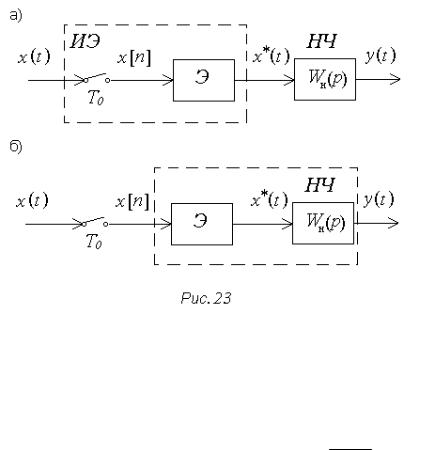
Рассмотрим сначала получение передаточной функции разомкнутой сис- темы (рис. 23а).
При получении пе-
редаточных функций импульсных систем и звеньев используются два варианта модели им- пульсного звена, рас- смотренные на лекции 8.
Для модели перво- го вида, в которой сиг-
нал на выходе ключа x[n] рассматривается в
форме решетчатой функции, вводится поня-
тие приведенной весовой функции непрерывной части системы. Приведенная весовая функция wп(t) - это реакция непрерывной
части на единичную импульсную функцию x[n]=δ0[n]. Отметим, что при этом в состав непрерывной части включается экстраполятор (рис. 23б).
Найдем дискретную передаточную функцию непрерывной части
W(z) = YX((zz)).
Сучетом Z {δ0 [n]} = 1(табл. 1) получим:
∞ |
|
W (z) = Y (z) = Z {wп (t)} = åwп[n]z −n - |
(10.1) |
n=0
результат, аналогичный линейным системам.
Для модели второго вида, в которой сигнал на выходе ключа рассматри- вается в форме последовательности δ-функций:
x[n] = x(t)δ(t-nT0),
может быть определена обычная непрерывная весовая функция w(t) непрерыв- ной части, включая экстраполятор, как реакция на единичный импульс x[n] = δ(t). Далее может быть определена непрерывная передаточная функция непре-
рывной части
36
W (p) = W э (p)W н (p) = L{w(t)} = ∞òw(t)e− pt dt |
(10.2) |
0 |
|
и дискретная передаточная функция непрерывной части |
|
W (z) = Z {W (p)} , |
(10.3) |
совпадающая с (10.1).
Большинство задач исследования и проектирования импульсных систем решается с помощью дискретных передаточных функций, так как при их полу- чении на основе (10.1) или (10.3) полностью учитываются характеристики им- пульсной части системы, включая шаг дискретизации по времени. Однако при использовании импульсных передаточных функций следует учитывать их неко- торые особенности по сравнению с непрерывными, определяемыми (10.2).
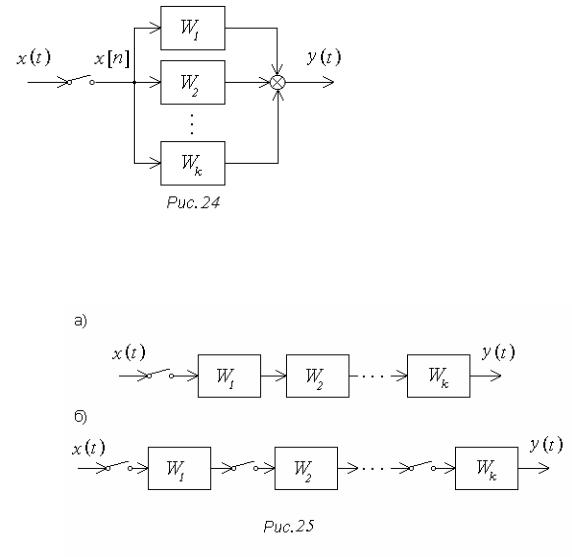
Так при нахождении эквивалентной передаточной функции параллельно соединенных звеньев (рис. 24) в обоих случаях могут использоваться соотно-
шения:
k
W (p) = åW i (p) и
i=1
k
W (z) = åW i (z).
i=1
В то же время для после-
довательного соединения при наличии общего ключа на вхо- де (рис.25а):
k
W (p) = ÕW i (p)
i=1
k |
|
и W (z) ¹ ÕW i (z). |
(10.4) |
i=1
Таким образом, объединение непрерывных последовательно соединен- ных звеньев и получение общей передаточной функции должно быть выполне-
37
но в рамках преобразования Лапласа (10.2) и только потом может быть найдена дискретная передаточная функция всего непрерывного участка системы.
Равенство в (10.4) будет
иметь место только при наличии на входе каждого звена своего импульсного элемента (рис. 25б),
причем передаточные функции звеньев и здесь должны опреде- ляться совместно с экстраполято- рами.
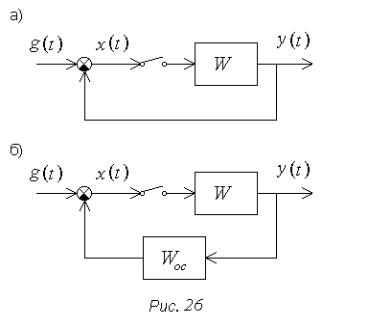
Особенности дискретных передаточных функций проявля-
ются и при описании замкнутых систем.
При наличии единичной от- рицательной обратной связи (рис. 26а) передаточные функции замк- нутой системы определяются ана-
логично непрерывным системам.
Основная передаточная функция замкнутой системы:
Ф(z) = |
Y (z) |
= |
W (z) |
. |
(10.5) |
|
G(z) |
1+W (z) |
|||||
|
|
|
|
Передаточная функция замкнутой системы по ошибке:
Фx (z) = |
X (z) |
= |
1 |
. |
(10.6) |
|
G(z) |
1+W (z) |
|||||
|
|
|
|
В случае гибкой обратной связи (рис. 26б) без дополнительного импульс-
ного элемента указанные передаточные функции определяются следующим образом:
Ф(z)= |
Y (z) |
|
= |
|
W (z) |
|
, |
|
(10.7) |
||
G(z) |
1+W (z) |
|
|||||||||
|
|
|
|
|
|
||||||
|
X (z) |
|
|
1 |
|
|
|
|
|||
Фx (z) = |
= |
|
1 |
|
|
, |
(10.8) |
||||
G(z) |
|
1+W 1(z) |
|||||||||
|
|
|
|
|
|||||||
где W 1(z) = Z {W (p)W ос(p)}.
Для определения передаточной функции замкнутой системы по возму- щению также могут потребоваться дополнительные преобразования. Рассмот- рим случай, когда возмущающее воздействие f(t) приложено к непрерывной части, как показано на рис. 27.
38
Перенесем возмущение на вход системы в виде воздействия f’(t), для ко- торого может быть найдено изображение по Лапласу F1(p) = W 2 (p)F(p).
Передаточная функция системы по возмущению определяется при g(t)=0 и с учетом (10.4) - (10.5) будет равна:
Фf (z) = |
Y (z) |
= − |
F' (z) |
, |
(10.9) |
|
F(z) |
1+W (z) |
|||||
|
|
|
|
где
F' (z) = Z {W 2 (p)F(p)} , W (z) = Z {W 1(p)W 2 (p)} .
Лекция 11. Анализ устойчивости и качества импульсных систем
Если представить дискретную передаточную функцию замкнутой им-
пульсной системы в форме
|
b |
+ b z −1 +...+b z −l |
|
|
|
0 |
1 |
l |
|
|
|
Ф(z) = |
|
|
|
, |
(11.1) |
a |
+ a z −1 |
+...+a z −m |
|||
0 |
1 |
m |
|
|
|
можно перейти к разностному уравнению, связывающему входной и выходной сигналы системы. При этом, как видно из (10.5) - (10.9), знаменатель переда- точных функций, определяющие вид левой части разностного уравнения, для всех передаточных функций конкретной системы одинаков. Его называют ха- рактеристическим полиномом замкнутой системы:
D(z) = a z m + a z m−1 |
+...+a |
или D(z) = a |
+ a z −1 |
+...+a |
m |
z −m . |
|
0 |
1 |
m |
0 |
1 |
|
|
|
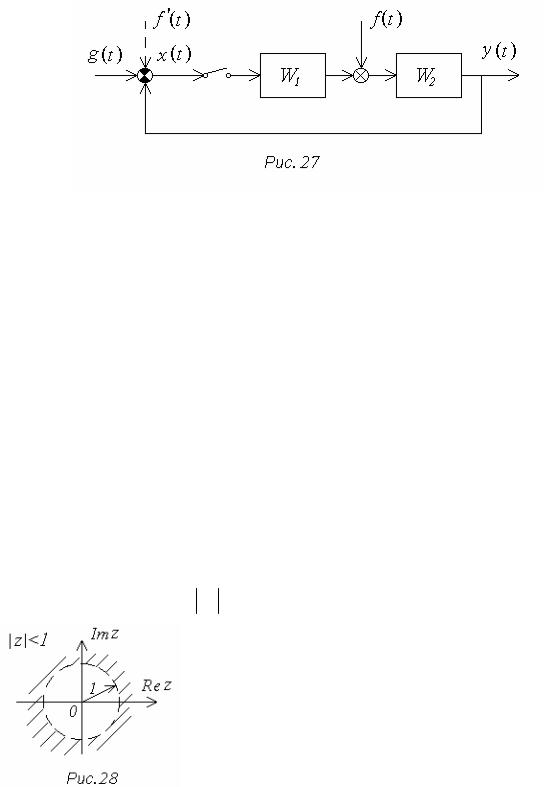
Как было показано в лекции 8, устойчивость системы определяется кор- нями характеристического полинома. Для устойчивости системы необходимо и достаточно, чтобы все корни zi , i=1,2,...m, характеристического полинома удовлетворяли условию: zi < 1. Область устойчивости на комплексной плос-
кости будет иметь вид круга единичного радиуса (рис. 28). Таким образом, проверка устойчивости может быть выполнена, если будет выполнена достаточно
39
трудоемкая процедура вычисления корней уравнения D(z)=0.
Известно, что для непрерывных систем существует удобный математи- ческий аппарат анализа устойчивости и качества замкнутой системы, не тре- бующий вычисления корней характеристического полинома. Возможность ис- пользования этого математического аппарата для импульсных систем обеспе- чивается на основе дополнительного w-преобразования дискретной передаточ- ной функции. Преобразование выполняется на основе подстановки
|
z = |
|
1 + w |
, |
|
|
|
(11.2) |
|
|
|
|
|
||||
где w -новая комплекная переменная. |
|
1 − w |
|
|
|
|
||
|
|
|
|
|
|
|
||
После подстановки (11.2) в (11.1) будет получена новая дискретная пере- |
||||||||
даточная функция замкнутой системы |
+ d zl−1 |
|
|
|
|
|||
|
d zl |
+...+d |
|
|
|
|||
0 |
1 |
|
l |
|
|
|
||
Ф(w) = |
|
|
|
(11.3) |
||||
c z m + c z m−1 +...+c |
|
|
||||||
0 |
1 |
|
m |
|
|
|||
с характеристическим полиномом |
|
|
|
|
|
|
|
|
D(w) = c z m |
+ c z m−1 +...+c |
m |
. |
(11.4) |
||||
0 |
1 |
|
|
|
|
|||
Определим требование к корням полинома (11.4) для обеспечения устой- чивости системы. Оно может быть получено на основе неравенства
z |
|
= |
|
1 |
+ w |
|
< 1 или |
|
1 + w |
|
< |
|
1 − w |
|
. |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|||||||||
|
1 |
− w |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С учетом записи w=α+jβ получим 
 (1 + α)2 + β2 <
(1 + α)2 + β2 < 
 (1 − α)2 + β2 . Оче-
(1 − α)2 + β2 . Оче-
видно, это неравенство может быть выполнено только при α<0.
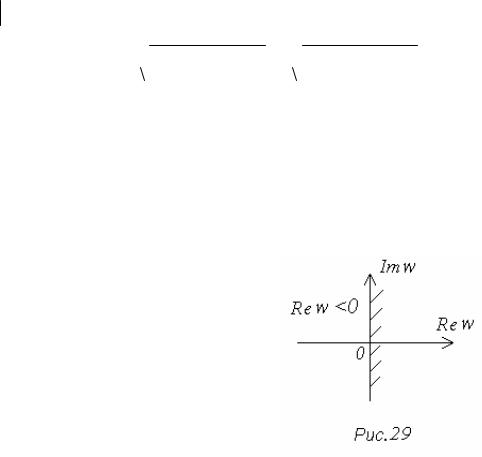
Таким образом, область устойчивости для корней характеристического полинома D(w) импульсной системы совпадает с областью устойчивости для корней характеристического полинома D(p) непрерывной системы (рис. 29). Поэтому после перехода к передаточной функции (11.3) на импульсную систе- му может быть распространен весь математический аппарат исследования ус- тойчивости непрерывных систем.
Необходимое условие устойчивости: все коэф-
фициенты характеристического полинома должны быть положительны. В случае отрицательных коэффи- циентов для применения данного условия использует- ся умножение полинома на -1. Для систем с характе-
ристическим полиномом первого или второго порядка это условие является необходимым и достаточным.
Для систем с характеристическим полиномом более высокого порядка при выполнении необходимо-
го условия для обеспечения устойчивости требуется выполнение какого-либо достаточного условия (критерия устойчивости). Ниже
40
рассмотрим два наиболее часто используемые критерия устойчивости: крите- рий Гурвица и критерий Найквиста.
В соответствии с алгебраическим критерием Гурвица для устойчивости системы достаточно, чтобы для матрицы, составленной из коэффициентов ее характеристического полинома:
a1 a3 a0 a2 0 a1
... ...
0 0
были положительны n определителей:
a5 |
... |
0 |
|
a4 |
... |
0 |
|
a3 |
... |
0 |
, |
... ... ... |
|
||
0 |
... |
an |
|
D |
1 |
= |
|
a |
|
= a > 0 , D |
2 |
= |
a1 |
a3 |
= a a |
- a a > 0 , и так далее. |
||
|
|
|||||||||||||
|
|
|
1 |
|
1 |
|
a0 |
a2 |
1 |
2 |
0 |
3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, при использовании w-преобразования порядок примене-
ния необходимого условия устойчивости и критерия Гурвица для импульсных систем полностью аналогичен случаю непрерывных систем. Это относится и ко всем другим алгебраическим критериям устойчивости.
Для использования частотных критериев устойчивости и методов анализа качества в случае импульсных систем необходимы дополнительные преобразо- вания.
После естественной замены в передаточных функциях p=jw, где ω - час- тота входного гармонического сигнала, получим:
z = e jωT0 |
, Ф(z) = |
b |
+ b e− jωT0 +...+b e− jlωT0 |
|||||
|
0 |
1 |
|
l |
|
. |
||
a |
+ a e |
− jωT |
+...+a e |
− jmωT |
||||
|
|
0 |
0 |
|
||||
|
|
0 |
|
1 |
|
m |
|
|
Такие передаточные функции неудобны для дальнейших аналитических преоб- разований. Поэтому для импульсных систем вместо реальной частоты исполь- зуется псевдочастота, переход к которой производится на основе w- преобразования.
Следствием (11.2) является соотношение:
|
|
|
|
|
|
|
|
w = |
z − 1 |
. |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
z + 1 |
|
|
|
|
|
|
|
|
||
Выполнив подстановку z = e jωT0 , получим: |
|
|
|
2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
jωT0 |
|
|
æ |
|
ωT |
|
|
ωT |
|
ö |
|
|
|||
|
|
jωT0 |
|
|
|
2 |
|
|
|
|
çcos |
|
|
0 |
+ j sin |
|
0 |
÷ |
|
- 1 |
||
|
|
- 1 |
|
e |
2 |
- 1 |
|
|
|
|
||||||||||||
w = |
e |
= |
|
|
= |
è |
|
|
|
2 |
|
|
2 |
ø |
|
|
=... |
|||||
jωT |
|
|
|
jωT |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||
|
e |
0 |
+ 1 |
|
2 |
0 |
|
|
æ |
|
ωT |
0 |
|
ωT |
0 |
ö |
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
e |
|
2 |
+ 1 |
ç |
|
|
|
+ j sin |
|
÷ |
|
+ 1 |
|||||
|
|
|
|
|
|
|
ècos |
|
|
2 |
|
2 |
ø |
|
||||||||
41

|
|
... = j tg |
ωT0 |
|
|
|
||||||||
|
|
|
|
|
2 = jJ , |
|
||||||||
где величина J = tg |
ωT0 |
называется относительной псевдочастотой. Удобнее |
||||||||||||
2 |
||||||||||||||
использовать абсолютную псевдочастоту |
|
|
|
|
|
|
||||||||
|
|
|
l = |
|
2 |
tg |
ωT0 |
= |
2 |
J, |
(11.5) |
|||
|
|
|
|
2 |
|
|||||||||
|
|
|
|
|
T0 |
|
T0 |
|
||||||
так как на малых частотах |
tg |
ωT0 |
|
» |
ωT0 |
|
и λ ≈ ω , то есть совпадает с реаль- |
|||||||
|
|
|
||||||||||||
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
||
ной частотой гармонического сигнала.
Частотный критерий устойчивости Найквиста и связанные с ним методы анализа качества и синтеза систем применяются для импульсных систем с ис- пользованием псевдочастотных характеристик, получаемых из передаточной функции разомкнутой системы W(z) путем подстановок (11.2) и вытекающей из (11.5)
|
|
w = j |
T0 |
l . |
(11.6) |
|
|
|
|
||||
|
|
|
2 |
|
|
|
При этом нужно иметь в виду, что изменению абсолютной псевдочастоты |
||||||
в пределах −∞ < λ < ∞ |
согласно (11.5) соответствует изменение реальной |
|||||
частоты в пределах - π |
T0 |
< w < π |
. При дальнейшем увеличении ω будет |
|||
|
|
T0 |
|
|||
проявляться периодичность зависимости (11.5). Поэтому результаты, получае- мые на основе псевдочастотных характеристик, следует считать достаточно
точными для w £ 2T0 , или l £ π 2T0 , а анализ более высоких псевдочастот
позволяет делать только качественные выводы.
Рассмотрим порядок применения критерия Найквиста и оценки запаса устойчивости импульсной системы на примере.
Требуется проанализировать устойчивость замкнутой системы, с переда-
точной функцией непрерывной части Wн (p) = |
k |
|
. Заданы параметры |
|
p(Tp |
+1) |
|||
|
|
непрерывной части: k=100c-1, T=0,2c. Импульсный элемент с тактом величи- ной T0=0,05с формирует прямоугольные импульсы. Относительная продол-
жительность импульсов (скважность) g=0,1.
Сигнал на выходе экстраполятора при единичном входном импульсе
d0 |
ì1 |
п ри |
n = 0 |
[n] = í |
п ри |
n ¹ 0 |
|
|
î0 |
42

может быть представлен в виде: x *(t) = 1(t) - 1(t - gT0 ). С учетом его изо-
бражения по Лапласу (табл. 1) найдем передаточную функцию экстраполятора:
W э(p) = 1- e− pγT0 . p
С учетом gT0<<1 воспользуемся разложением экспоненты в ряд и приближе-
нием:
e− pγT0 » 1- pgT0 .
В результате передаточная функция экстраполятора может быть записана в ви- де:
W э(p) » 1− 1+ppγT0 = gT0 .
Передаточная функция непрерывной части с учетом экстраполятора бу- дет иметь вид:
|
|
W н (p) = |
|
kγT0 |
. |
|
|
|
|
|
|
p(Tp + 1) |
|
|
|
||||
|
|
|
|
|
|
|
|||
Дискретная передаточная функция разомкнутой системы (по табл. 1): |
|||||||||
W (z) = |
kgT0 (1 - d)z |
− |
T0 |
|
|
||||
T = 0,78 , |
|||||||||
|
|
|
, d = e |
|
|||||
(z - 1)(z - d) |
|||||||||
|
|
|
|
|
|
||||
и замкнутой системы: |
|
kgT0 |
(1 - d)z |
|
|
|
|
||
Ф(z) = |
|
|
|
= |
|||||
(z - 1)(z - d) + kgT0 (1 - d)z |
|||||||||
|
|
0,11z |
|
|
|
|
0,11z |
||
= (z - 1)(z - 0,78) + 0,11z = z2 - 1,67z + 0,78 .
После подстановки (5.2) получим характеристический полином
D(w) = 3,45w2 + 0,44w + 0,11.
В соответствии с необходимым условием устойчивости данная система второго порядка устойчива.
Для оценки запаса устойчивости воспользуемся частотным методом. С помощью подстановки (11.2) получим передаточную функцию разомкнутой
системы
W (w) = kgT0 (1( - d)(1 + w)(1 -) w) = 2w 1 - d + w + dw
kgT0 (1 + w)(1 - w) |
. |
|||
æ |
|
1 + d |
ö |
|
2wç1 |
+ |
|
w÷ |
|
1 - d |
|
|||
è |
|
ø |
|
|
Подстановкой (11.6) перейдем к псевдочастоте:
43

|
kgT |
0 |
æ |
|
T |
0 |
|
öæ |
|
T |
0 |
|
ö |
|
|
|
|
|
|
||||
|
|
|
ç |
1 + j |
|
l֍1 - j |
|
|
|
l÷ |
|
kg(1 + jT1l)(1 |
- jT1l) |
|
|||||||||
|
|
2 |
|
|
2 |
|
2 |
|
|
||||||||||||||
W ( jl) = |
|
|
|
è |
|
|
øè |
|
|
|
ø |
= |
, |
||||||||||
|
|
|
T0 |
æ |
|
|
T |
0 |
(1 + d) |
|
ö |
|
jl(1 + jT |
э |
l) |
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
j |
lç1 + j |
|
|
|
|
l÷ |
|
|
|
|
|
||||||||||
|
|
|
2(1 - d) |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2 |
è |
|
|
|
|
ø |
|
|
|
|
|
|
|
|||||||
где kγ=10; T1 = |
T |
0 |
|
= 0,025 ; |
Tэ = |
T0 (1 + d) |
» 0,201. |
|
|
|
|
||||||||||||
|
2 |
|
|
2(1 - d) |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Получим выражения для логарифмических псевдочастотных характери-
стик:
L(l) = 20lg kg + 40lg
 1 + T12l2 - 20lg l + 20lg
1 + T12l2 - 20lg l + 20lg
 1 + Tэ2l2 ,
1 + Tэ2l2 ,
ψ(λ) = −90o − arctgTэ λ .
Характеристики показаны на рис. 30.
Вывод об устойчивости системы подтверждается. Запас устойчивости по фазе составляет mψ = 33o.
Точность системы в установившемся режиме может быть оценена на ос- нове теоремы о конечном значении (9.9).
Установившаяся ошибка от задающего воздействия:
|
x |
ус т |
= lim |
x[n] = lim |
z − 1 |
Ф (z)G(z). |
(11.7) |
||||
|
|
||||||||||
|
|
n→∞ |
|
z→1 |
z |
x |
|
|
|
||
|
|
|
|
|
|
|
|
||||
Установившаяся ошибка от возмущающего воздействия: |
|
||||||||||
xус т = lim |
x[n] = lim |
z − 1 |
Фxf (z)F(z) = - lim |
z − 1 |
Фf (z)F(z). |
(11.8) |
|||||
|
|
||||||||||
n→∞ |
|
z→1 |
z |
|
|
|
z→1 |
z |
|
||
44