

Лекция 16. Синтез системы управления. Обеспечение запаса устойчивости системы (продолжение)
Для следящих систем с электрическими, пневматическими или гидравли- ческими исполнительными двигателями передаточная функция без учета инер- ционности усилителей и других малых постоянных времени часто имеет вид:
W (p) = |
k |
|
|
, |
|
p(1 + T1 p) |
||
то есть имеет место астатизм первого порядка.
Иногда удается выбрать исполнительный двигатель так, чтобы при дос- таточно большом коэффициенте передачи k, обеспечивающем достаточную точность, выполнялись и требования по запасу устойчивости. Допустимое зна- чение постоянной времени двигателя T1 может быть найдено через АЧХ замк- нутой системы:
H (ω) = |
|
k |
|
= |
|
|
|
|
|
k |
|
|
|
|
|
|
|
, |
причем H (0) = 0. |
||
|
( jω)2T1 + jω + k |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
(k − ω2T1 )2 + ω2 |
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||
Из условия max H (ω) ≤ M получается ограничение на допустимое зна- |
|||||||||||||||||||||
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чение постоянной времени: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
2 + M |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
T1 ≤ |
|
M |
M |
2 − 1 |
. |
|
|
|
(16.1) |
||||||||||
|
|
|
|
|
|
|
|
2k |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С учетом постоянных времени других устройств системы передаточная |
|||||||||||||||||||||
функция примет вид: |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|||
|
|
W (p) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
p(1 + T1 p)(1 + T2 p)...(1 + Tn p) |
|||||||||||||||||||
и аналогично (16.1) приближенно может быть получено: |
|
|
|||||||||||||||||||
|
|
|
n |
|
|
|
M |
2 |
+ M |
|
M |
2 |
− 1 |
|
|
|
|
|
|||
|
|
k åTi ≤ |
|
|
|
|
. |
(16.2) |
|||||||||||||
|
|
|
|
2 |
|
|
|
|
|||||||||||||
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Соотношение (16.2) позволяет при заданном значении k выбирать допус-
тимые значения постоянных времени устройств системы или при известных постоянных времени - определить предельное значение коэффициента усиле- ния, определяющее точность системы. Эта формула дает приемлемую точность при M ≤ 1,3.
Если реальные устройства с параметрами, соответствующими (16.1) или (16.2), подобрать не удается, то синтез системы выполняют на основе типовой ЛАХ, показанной на рис. 45. Ей соответствует передаточная функция:
61
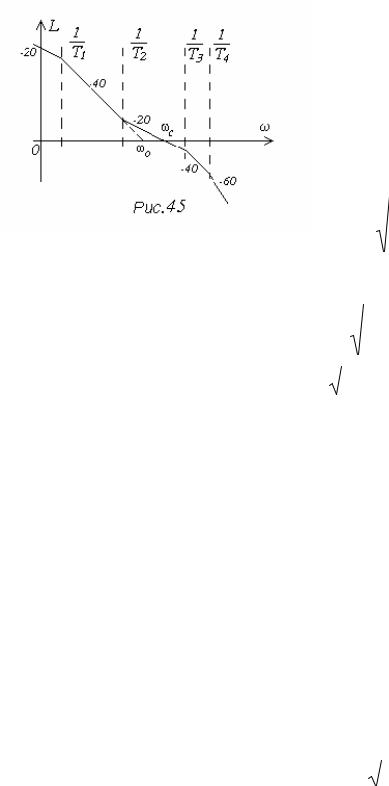
W (p) = |
|
k (1 + T2 p) |
|
|
|
|
, |
T1 > T2 . |
|
p(1 |
+ T1 p)(1 + T3 p)...(1 + Tn p) |
||||||||
|
|
|
|||||||
|
|
|
Поскольку сопрягаю-щая частота |
||||||
|
|
w1 = |
|
1 |
, как |
|
правило, оказывается |
||
|
|
|
|
|
|||||
|
|
|
T1 |
|
|
||||
далека от частоты максимума запретной зоны, при определении требований к границам участка с наклоном -20 дБ/дек ею обычно пренебрегают. Тогда в рай-
оне частоты среза картина получается аналогичной рис. 44, причем
|
|
|
k |
|
2 |
|
T2 |
|
|
w0 |
= |
|
|
|
и wc = w0T2 |
= k |
|
. В |
|
T1 |
T1 |
||||||||
|
|
|
|
|
|
||||
результате длина участка с наклоном -20 дБ/дек получается соответствующей (15.3) и требования к постоянным времени - аналогичными (15.4) - (15.9):
T2 |
= |
|
1 |
|
|
|
|
|
M |
|
|
|
|
, |
|
(16.3) |
|||
w0 |
|
|
M - |
1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
n |
1 |
|
|
|
|
|
M (M - 1) |
|
|
||||||||||
åTi £ |
|
|
|
|
|
, |
(16.4) |
||||||||||||
w0 |
|
|
|
|
|
|
|
|
|||||||||||
i=3 |
|
|
|
|
|
|
|
M + 1 |
|
|
|
|
|
|
|
||||
T2 ³ |
|
1 |
|
|
|
|
M |
|
|
, |
|
|
|
(16.5) |
|||||
|
wс M - 1 |
|
|
|
|||||||||||||||
n |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
1 |
|
|
M |
|
|
|
|
|
|
|
||||
åTi £ |
|
|
|
|
|
|
. |
|
(16.6) |
||||||||||
wс M + |
1 |
|
|||||||||||||||||
i=3 |
|
|
|
|
|
|
|
|
|||||||||||
Точный расчет с учетом действительной величины T1 позволяет немного увеличить значения правых частей (16.4) и (16.6) и соответственно расширить диапазон допустимых значений постоянных времени.
Для статических систем, имеющих в простейшем случае передаточную
функцию
W (p) = |
|
|
k |
|
|
, T1 > T2 |
, |
|||
(1 + T1 p)(1 + T2 p) |
||||||||||
при достаточно больших k или T1 может быть получено соотношение |
||||||||||
|
kT2 |
£ |
M 2 + M |
|
M 2 - 1 |
|
. |
(16.7) |
||
|
|
|
2 |
|
|
|||||
|
T1 |
|
|
|
|
|
||||
При наличии в системе других инерционных звеньев аналогично (16.2) получается приближенное соотношение:
62
|
|
|
|
|
|
|
|
|
|
k |
n |
2 |
+ M M |
2 |
− 1 |
|
|
||
åTi ≤ |
M |
|
|
, |
(16.8) |
||||
T1 |
|
|
2 |
|
|
|
|||
i=2 |
|
|
|
|
|
|
|||
считающееся достаточно точным при M ≤ 1,3 .
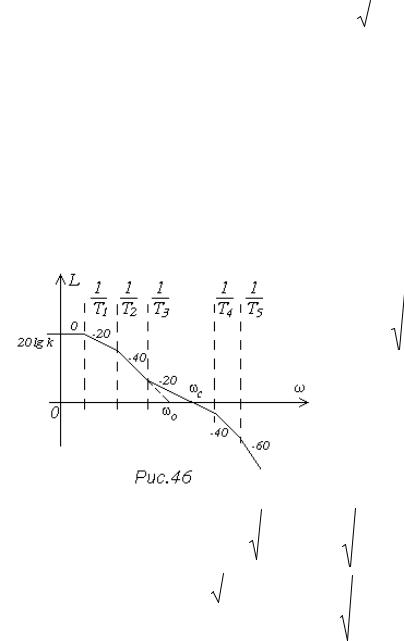
Если из-за повышенных требований к точности системы соотношениями (16.7) или (16.8) воспользоваться не удается, синтез системы выполняют на ос- нове типовой ЛАХ, показанной на рис. 46. Ей соответствует передаточная
функция
W (p) = |
|
|
|
|
|
k(1 + T3 p) |
|
|
|
|
|
, T1 > T2 > T3 . |
||||||||||||||
(1 + T1 p)(1 + T2 p)...(1 + Tn p) |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Предполагая T1 и T2 доста- |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
точно большими, можно получить |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ω0 ≈ |
|
k |
|
|
|
|
|
|
|
и |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
T1T2 |
|
T3 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ωc = ω |
2 |
|
≈ k |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0T3 |
|
|
|
|
и далее со- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T1T2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
отношения для определения тре- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
буемого значения T3 и допустимого |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
значения суммы малых постоянных |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
времени: |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
T3 = |
|
|
M |
|
|
= |
|
|
|
T1T2M |
, |
|
|
|
|
|
(16.9) |
||||||||
|
ω0 |
M − |
1 |
|
|
|
k(M − 1) |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
n |
|
1 |
|
|
|
M (M − 1) |
|
|
|
T1T2M (M − 1) |
|
|
|
|||||||||||||
åTi ≤ |
|
|
|
= |
|
. |
(16.10) |
|||||||||||||||||||
ω0 |
|
|
|
M |
+ 1 |
|
|
|
|
|
k(M + 1)2 |
|
||||||||||||||
i=4 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Если в системе присутствует временное запаздывание, его величина τ должна быть добавлена в левую часть соотношений (15.9), (16.2), (16.4), (16.6), (16.8), (16.10).
63

Лекция 17. Применение типовых ЛАХ при синтезе цифровых систем управления
Для цифровых систем управления возможно использование рассмотрен- ных в предыдущих лекциях типовых ЛАХ (типовых передаточных функций) при учете особенностей, которые вносятся дискретностью.
Выбор низкочастотной части ЛАХ должен проводиться в соответствии с методикой обеспечения заданной точности, рассмотренной в лекции 14 Необ- ходимо обеспечить, чтобы ЛАХ не заходила в запретную область (рис. 39, 40). При этом следует иметь в виду следующие обстоятельства.
1.Предполагается, что для частот, соответствующих запретной области, выполняется условие (14.1), благодаря чему запретная область для логарифми-
ческой псевдочастотной характеристики совпадает с запретной областью для ЛАХ.
2.Порядок экстраполятора не влияет на порядок астатизма цифровой сис- темы. При использовании статической передаточной функции компьютера по- рядок астатизма цифровой системы совпадает с порядком астатизма непрерыв- ной части.
3.Наличие квантования по времени может вызвать потерю информации об изменении задающего воздействия внутри такта дискретизации, что приводит к появлению дополнительной ошибки. Эту ошибку принято оценивать на выходе экстраполятора. В дискретных экстраполяторах ошибка на выходе накаплива- ется в течение такта дискретизации и сбрасывается в начале очередного такта.
Для заданной допустимой величины ошибки на выходе экстраполятора в конце
такта εн.max допустимая величина такта дискретизации может быть найдена по соотношению:
|
|
|
|
|
T0 ≤ m+1 |
(m + 1)! eн.max |
, |
(17.1) |
|
am+1 |
||||
|
|
|
где m=l+r - сумма порядка астатизма системы l и порядка экстраполятора r, am+1 - максимальное значение m+1-й производной от задающего воздействия.
Например, в системе с астатизмом первого порядка при использовании экстраполятора нулевого порядка допустимый период дискретизации опреде- ляется максимальным значением ускорения:
|
|
|
|
|
T |
0 |
≤ |
2eн.max . |
|
|
|
.. |
|
|
|
|
|
gmax |
|
Если входной сигнал |
|
изменяется по гармоническому закону |
||
g(t) = gmax sin(ω gt + ϕ g ), формула (17.1) приобретает вид:
64
|
|
|
|
. |
T0 ≤ |
1 |
m+1 |
(m + 1)! eн.max |
|
|
||||
|
ωg |
gmax |
||
Рассмотрение методики применения типовых ЛАХ, удовлетворяющих требованиям по запасу устойчивости, для цифровых систем начнем с анализа
связи ЛАХ непрерывной части Lн(ω) и логарифмической псевдочастотной ха-
рактеристики Lн(λ) цифровой разомкнутой системы.
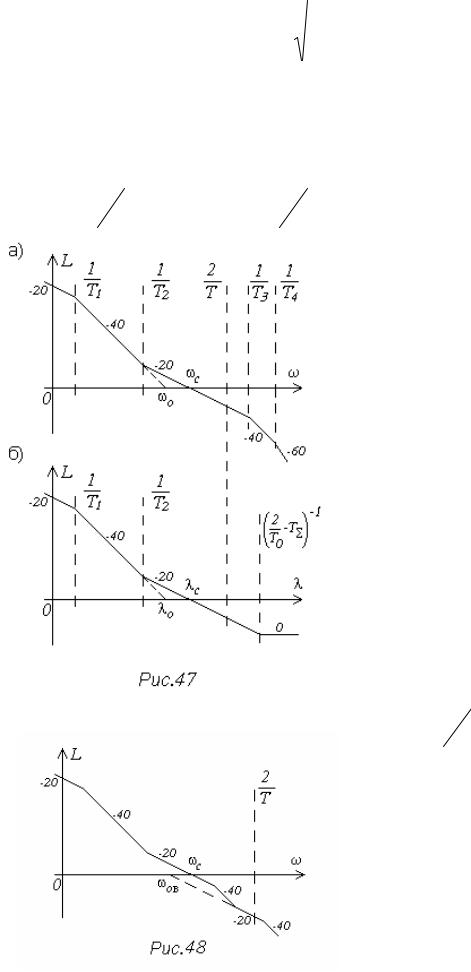
Рассмотрим отдельно два диапазона частот: низкие, соответствующие ус-
ловию ω < 2T0 , и высокие, ω > 2T0 (рис. 47).
В области низких частот с учетом сказанного выше можно
считать, что Lн(ω) и Lн(λ) практи- чески совпадают. Поэтому при обеспечении условия T0ωс < 2
форма запретной области, соответ-
ствующей заданному показателю колебательности, и соотношения
(15.4), (15.6), (16.3), (16.5), (16.9)
могут без изменений использовать- ся для получения желаемых псев- дочастотных характеристик и тре-
бований к постоянным времени цифровой системы.
Для анализа области высоких частот запишем передаточную функцию непрерывной части в со- ответствии с рис. 47а с учетом только постоянных времени, опре-
деляющих высокие сопрягающие частоты, то есть отвечающих усло-
вию T |
i |
< T0 |
2 |
: |
|
||
|
|
|
|
ω0в |
|||
W в (p) = |
|
|
|
||||
p(1 + T3 p)(1 |
+ T4 p)...(1 + Tn p |
||||||
|
|
|
|||||
|
|
|
|
|
, |
(17.2) |
|
где ωов - базовая частота высоко- частотной части ЛАХ (рис. 48).
Передаточную функцию (17.2) можно представить в виде дроби:
65

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
Ai |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W в (p) |
|
= w0в + w0в å |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1 |
+T |
|
|
|
p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
i=3 |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Можно показать, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
n |
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
åAi |
= -åTi |
|
= -TΣ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(17.3) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=3 |
|
|
|
|
i=3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Предполагая использование экстраполятора нулевого порядка, перейдем |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
к псевдочастотным характеристикам: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
z - 1 |
|
|
ìW |
|
|
(p)ü |
|
|
z - 1 |
|
|
|
ì |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
A |
|
|
|
|
|
|
ü |
|
|
|||||||||||||||||||||||
W |
|
(z) = |
Z |
в |
|
|
Z |
ïw |
0в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
ï |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
í |
|
|
|
|
|
|
|
|
ý = |
|
|
|
|
|
|
|
|
í |
|
|
|
|
|
+ w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ý |
= |
|
||||||||||||||||||||||||
в |
z |
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
0в å p(1 + T |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
î |
|
|
|
|
|
|
|
þ |
|
|
|
|
|
|
|
|
|
|
|
ï |
|
|
p |
2 |
|
|
|
|
|
|
|
i |
p)ï |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
î |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=3 |
|
|
|
|
|
|
|
|
|
|
|
|
þ |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
z - 1 |
|
é |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
Aiz(1 - di ) |
|
|
ù |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
= |
|
êw0вT0 z |
+ w0в å |
|
|
|
|
|
|
ú |
, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
(z - 1)(z - d ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
ê |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
i=3 |
|
ú |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë(z - 1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
û |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
− |
T0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где di = e Ti |
» 0 . Далее с учетом (17.3) получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
W в (z) = |
w |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
z - 1 |
n |
|
|
|
|
|
A |
z |
|
|
|
|
|
|
|
|
|
|
w |
|
T |
|
|
|
|
|
w |
|
|
|
n |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
0в |
|
|
|
0 |
+ w0в |
|
|
|
|
|
|
å |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
= |
|
0в 0 |
|
+ |
|
|
|
|
0в |
åAi = |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
z |
|
|
|
|
(z - |
1)z |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
z - 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=3 |
|
|
|
|
|
z - 1 |
|
|
|
|
|
|
|
z |
|
i=3 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= ω0вT0 |
|
- |
ω0вTΣ . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z - 1 |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
После подстановок z = |
1+ w |
|
и w = j |
T0 |
|
l : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
1- w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
éT |
|
|
|
|
|
|
æT |
|
|
|
öù |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
||||||||||
|
|
|
w0вT0 (1 - w) |
|
|
|
|
w |
0вTΣ (1 - w) |
|
|
|
|
|
|
w0в (1 - w)ê |
|
|
|
|
|
+ wç |
|
|
|
- TΣ ÷ú |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
W в (w) = |
- |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
è 2 |
|
|
øû |
, |
|||||||||||||||||||||||||||||||||||||||||||||
1 + w - 1 + w |
|
|
|
|
|
|
1 + w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w(1 + w) |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
|
T |
0 |
|
|
|
ö |
é |
|
|
|
|
|
|
|
|
|
|
æT |
0 |
|
|
|
|
|
|
|
|
|
|
öù |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
ç1 |
- |
|
|
j |
|
|
|
l÷ |
|
1 + jlç |
|
|
|
|
|
|
- T |
Σ |
÷ |
ú |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0в è |
|
|
|
|
|
|
|
ø |
ê |
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
W в ( jl) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
, |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
|
|
|
|
|
T |
0 |
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jlç |
1 + |
|
|
j |
|
|
|
|
|
l÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Lв (l) = 20 lgw0в - 20 lg l + 20 lg 1 + l2 |
æT |
0 |
|
|
- T |
|
ö 2 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
ç |
|
|
|
|
÷ , |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
Σ ø |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
(l) = -90 |
o |
|
|
|
|
|
|
|
|
|
lT |
|
|
|
|
|
|
|
|
|
|
|
|
|
æ T |
|
|
|
|
|
|
|
|
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
y |
в |
|
|
- 2arctg |
|
|
|
|
0 |
+ arctgç |
|
|
|
0 |
|
|
- T |
|
|
÷l . |
|
|
|
|
|
|
|
|
(17.4) |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
|
|
|
|
|
|
|
|
Σ ø |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
66