Fanuc SOi mate-md
.pdfB-64144RU/01 |
ПРОГРАММИРОВАНИE |
14. ФУНКЦИЯ КОРРЕКЦИИ |
||
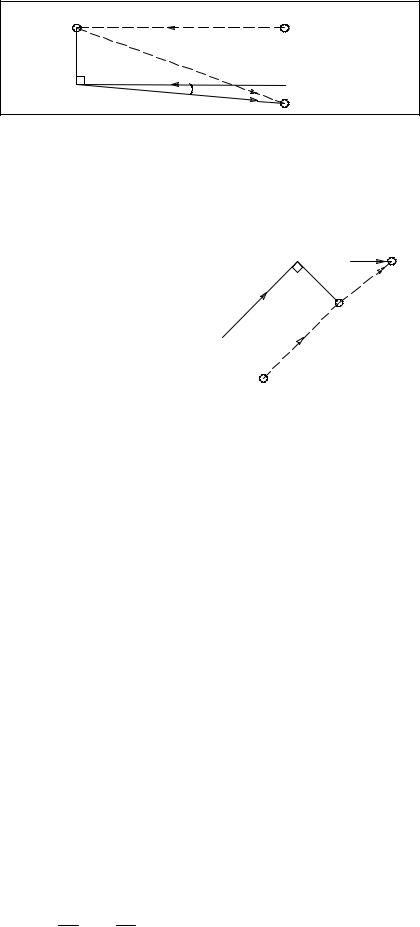
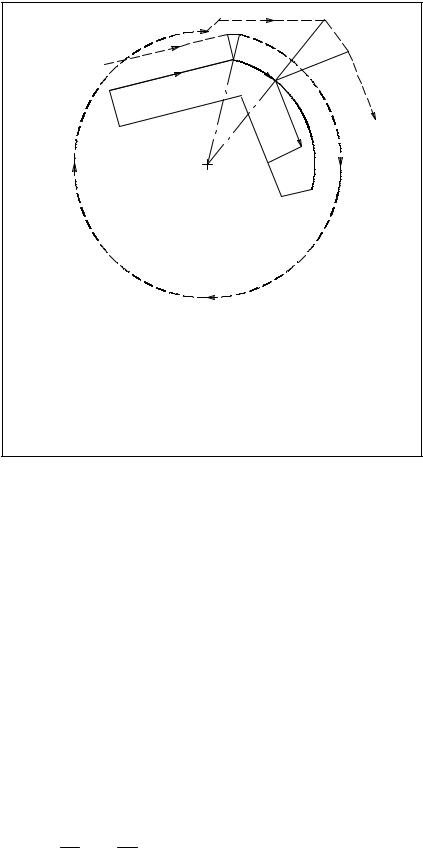
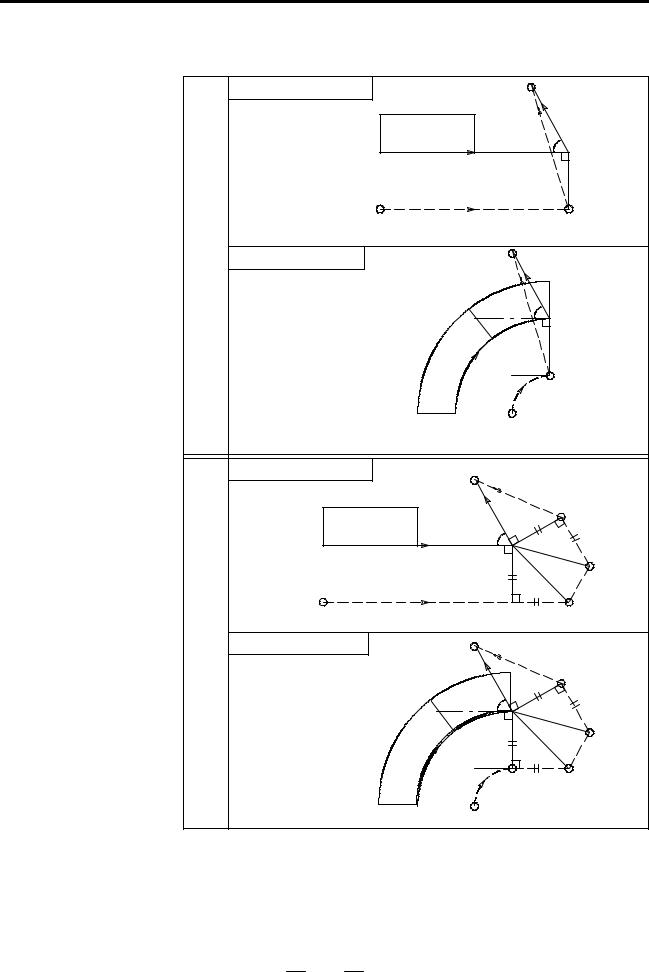
D Перемещение |
Траектория инструмента при запуске может быть 2-х типов, |
|||
инструмента вдоль |
A и B; тип устанавливается параметром SUP (ном. 5003#0). |
|||
внешней стороны |
|
|
|
|
тупого угла |
Линейное→Линейное |
|
|
|
(90° α<180°) |
|
|
|
G40 |
|
|
|
α |
|
|
Заготовка |
|
|
|
|
|
|
|
|
|
Запрограммированная траектория |
|
L |
|
|
|
|
||
|
|
|
r |
|
|
L |
|
|
|
|
Траектория центра инструмента |
S |
|
|
|
|
|
||
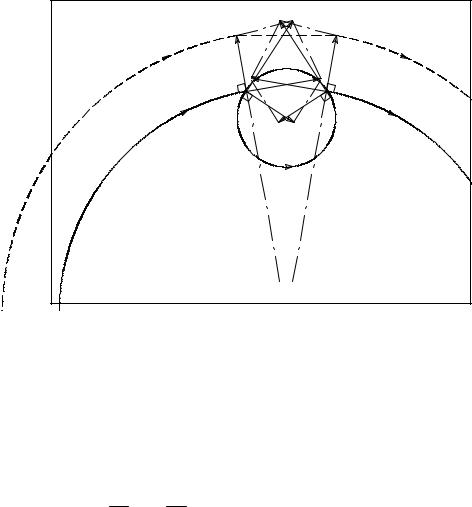
Тип |
|
|
|
|
A |
Круговое→Линейное |
|
|
|
|
|
α |
G40 |
|
|
|
|
|
|
|
|
|
L |
|
|
Заготовка |
|
|
|
|
|
r |
|
|
|
|
S |
|
|
|
|
C |
|
|
|
Запрограммированная траектория |
Траектория |
|
|
|
центра инструмента |
|||
|
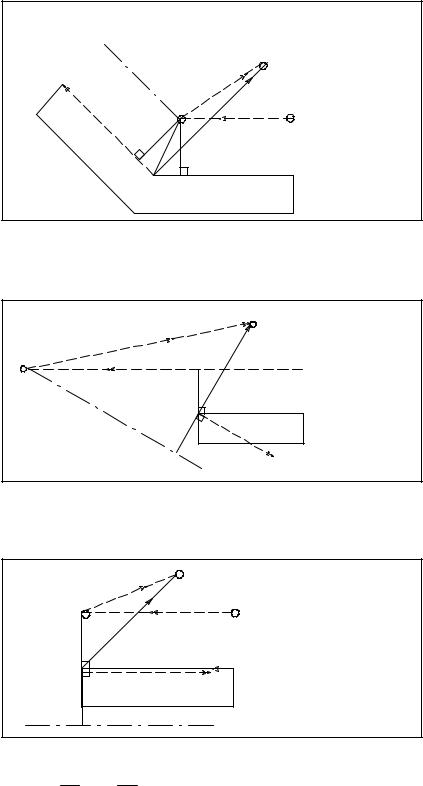
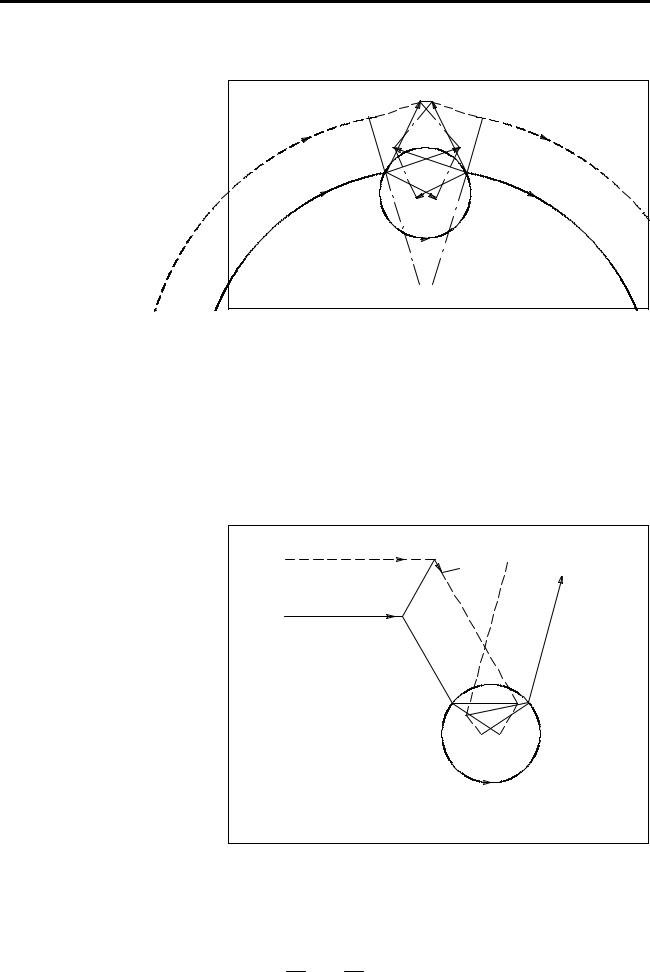
Линейное→Линейное |
|
|
|
|
Заготовка |
|
α |
G40 |
|
|
|
|
|
|
Запрограммированная траектория |
|
L |
|
|
|
|
||
|
|
|
|
r |
|
Траектория центра инструмента |
|
|
|
|
|
|
S L |
|
Тип |
|
Точка пересечения |
||
Круговое→Линейное |
|
|
|
|
B |
|
|
|
|
|
|
|
|
G40 |
|
|
|
α |
|
|
|
|
|
L |
|
Заготовка |
r |
r |
|
|
|
|
|
|
|
|
S |
|
|
|
|
C |
|
L |
|
Запрограммированная траектория |
|
L Точка пересечения |
|
|
Траектория центра инструмента |
|||
|
227 |
|
|
|
14. ФУНКЦИЯ КОРРЕКЦИИ |
ПРОГРАММИРОВАНИE |
|
|
|
B-64144RU/01 |
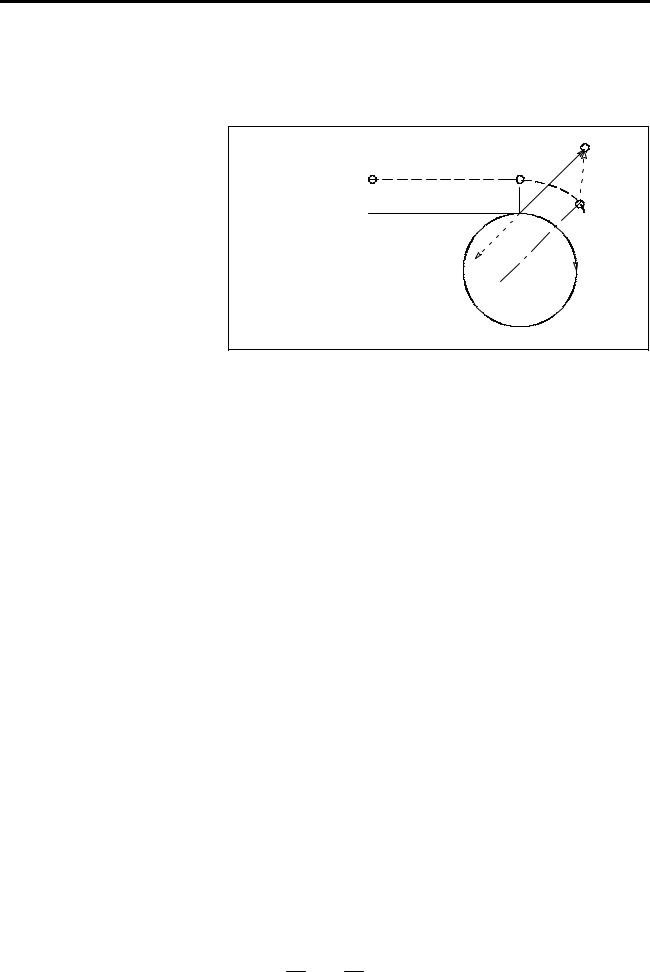
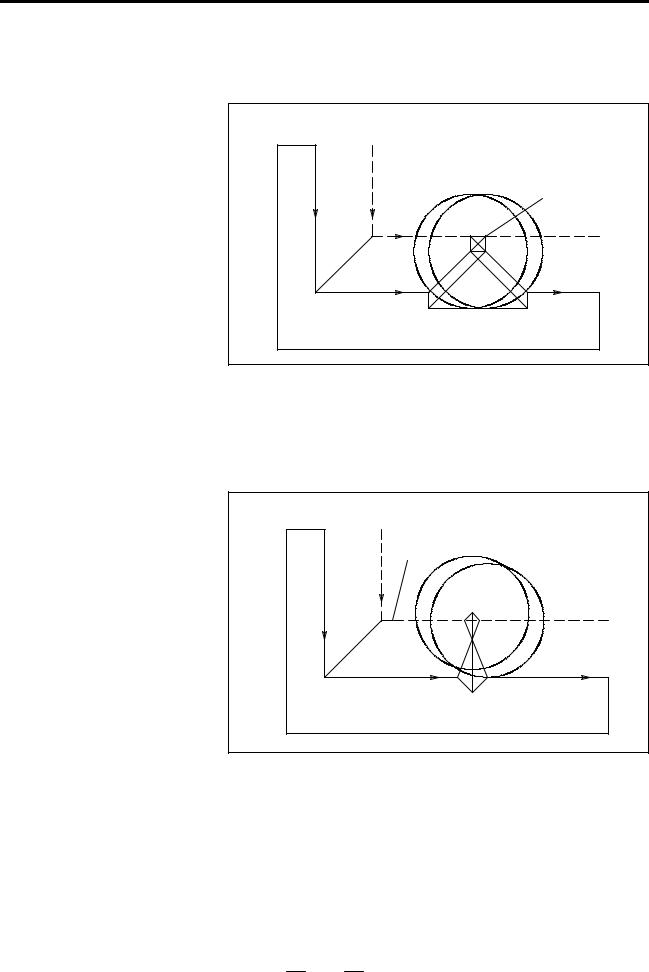
D Перемещение |
Траектория инструмента при запуске может быть 2-х типов, |
||||
инструмента вдоль |
A и B: тип устанавливается параметром SUP (ном. 5003#0) |
||||
внешней стороны |
|
|
|
|
|
острого угла |
Линейное→Линейное |
|
|
|
|
(α<90°) |
|
|
|
|
G40 |
|
Заготовка |
|
|
L |
|
|
G42 |
α |
|||
|
|
|
|
||
|
Запрограммированная траектория |
|
|||
|
|
|
|
|
r |
|
|
L |
|
|
|
|
Траектория центра инструмента |
S |
|||
|
|
||||
Тип |
|
|
|
|
|
A |
Круговое→Линейное |
|
|
|
|
|
|
|
|
G40 |
|
|
|
|
L α |
|
|
|
|
G42 |
|
r |
|
|
|
|
|
||
|
Заготовка |
|
|
C |
S |
|
|
|
|
||
|
|
|
|
|
|
|
Запрограммированная траектория |
|
Траектория |
||
|
|
|
|
центра инструмента |
|
|
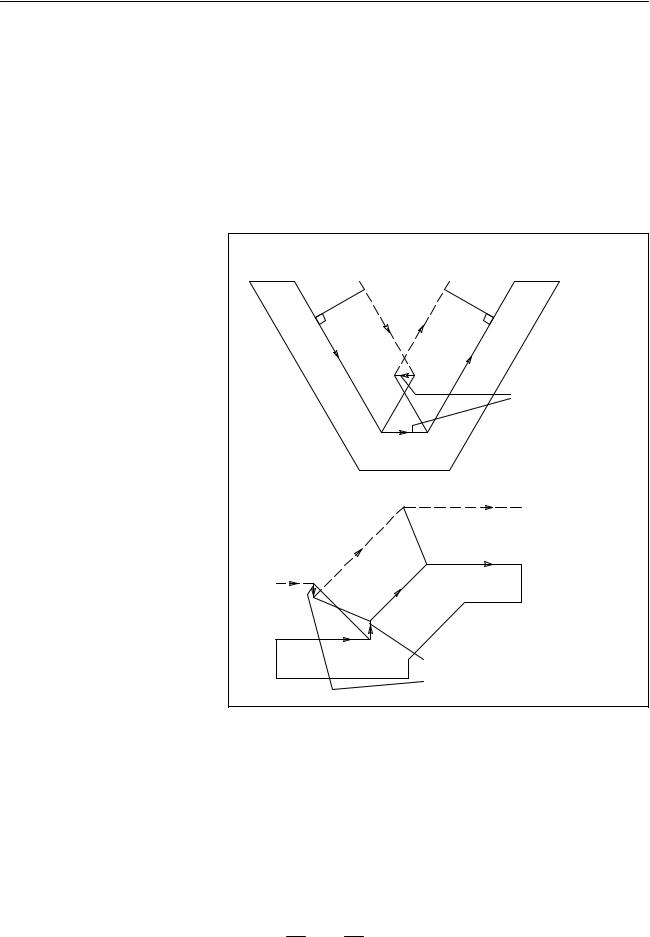
Линейное→Линейное |
|
|
|
|
|
|
|
|
L |
|
|
Заготовка |
G40 |
|
|
|
|
|
|
r |
|
|
|
|
α |
|
L |
|
|
Запрограммированная траектория |
|
|
|
|
|
Траектория центра инструмента |
r |
|
L |
|
Тип |
|
L |
|
L |
S |
|
|
|
|
|
|
B |
Круговое→Линейное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
α |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
r |
|
L |
|
|
|
|
|
|
|
Заготовка |
C |
S |
L |
|
|
|
||||
|
|
|
|
|
|
|
|
Траектория центра |
|||
|
Запрограммированная траектория |
инструмента |
|||
|
228 |
|
|
|
|