

4.7.3. Регулирование тока возбуждения синхронного двигателя
Регулирование тока возбуждения двигателя при работе в синхронном режиме осуществляется, как правило, САР возбуждения. САР возбуждения выполняет две основные функции. Первая - обеспечение устойчивой работы в синхронном режиме. При набросах нагрузки или при снижении величины питающего напряжения САР возбуждения форсирует (увеличивает) ток возбуждения, благодаря чему увеличивается максимальный момент двигателя в синхронном режиме (см.рис.4.26). Вторая – осуществление автоматического регулирования величины реактивной мощности, циркулирующей в статорной цепи двигателя.
Важным достоинством синхронных двигателей является возможность регулирования величины реактивной мощности, циркулирующей в цепи статора, в том числе возможность, работая двигателем, т.е. потребляя активную мощность, одновременно генерировать реактивную мощность, т.е. работать компенсатором реактивной мощности, потребляемой другими параллельно работающими приемниками электрической энергии, прежде всего асинхронными двигателями.
Применение на
предприятиях синхронных двигателей,
наряду с асинхронными, позволяет
уменьшить реактивную мощность,
потребляемую предприятием в целом, и
поддерживать нормативное значение
![]() в энергосистеме данного предприятия.
в энергосистеме данного предприятия.
Возможность регулирования реактивной мощности в цепи статора двигателя путем изменения тока его возбуждения иллюстрируется векторными диаграммами на рис.4.28.

Рис.4.28. Векторные диаграммы синхронного двигателя при разных токах возбуждения и одинаковой нагрузке на валу
В
Рис.4.29.
U-образные характеристики синхронного
двигателя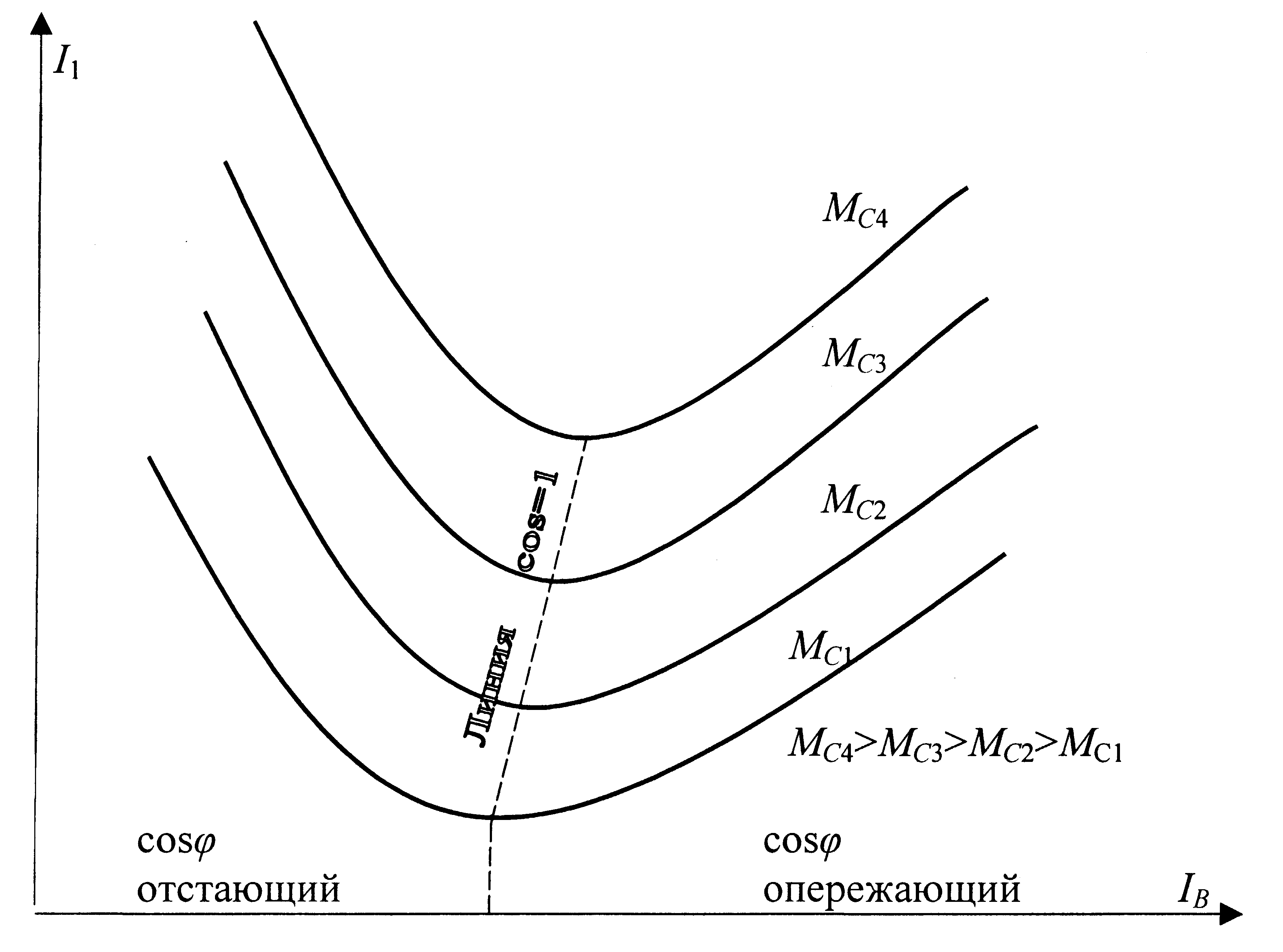 екторная
диаграмма (а) соответствует току
возбуждения меньше номинального; при
этом вектор тока статора
екторная
диаграмма (а) соответствует току
возбуждения меньше номинального; при
этом вектор тока статора![]() отстает
от вектора напряжения сети
отстает
от вектора напряжения сети![]() на угол
на угол![]() ,
т.е. двигатель работает с отстающими
,
т.е. двигатель работает с отстающими![]() (реактивная мощность «потребляется»).
При увеличении тока возбуждения э.д.с.Е1,
наводимая в обмотках статора, увеличивается
и может достигнуть такого значения, при
котором ток статора
(реактивная мощность «потребляется»).
При увеличении тока возбуждения э.д.с.Е1,
наводимая в обмотках статора, увеличивается
и может достигнуть такого значения, при
котором ток статора
![]() будет совпадать по фазе с напряжением
будет совпадать по фазе с напряжением![]() ,
т.е.
,
т.е.![]() (см.рис.4.28б). Момент на валу двигателя
при этом будет такой же, как и в предыдущем
случае, но реактивная мощность будет
равна нулю. Очевидно (это следует из
формулы (4.41) ток статораI1
при данном моменте нагрузки
будет минимальным. Этот режим является
энергетически наиболее выгодным для
синхронного двигателя, т.к. потери в
статоре будут минимальны.
(см.рис.4.28б). Момент на валу двигателя
при этом будет такой же, как и в предыдущем
случае, но реактивная мощность будет
равна нулю. Очевидно (это следует из
формулы (4.41) ток статораI1
при данном моменте нагрузки
будет минимальным. Этот режим является
энергетически наиболее выгодным для
синхронного двигателя, т.к. потери в
статоре будут минимальны.
Если еще больше
увеличить ток возбуждения, то ток статора
будет опережать по фазе напряжение
![]() ,
,![]() станет опережающим, и синхронный
двигатель будет генерировать реактивную
мощность (см. рис. 4.28в). Зависимость тока
статора от тока возбуждения синхронного
двигателя отражаетсяU-образными
характеристиками синхронного двигателя,
представленными на рис.4.29.
станет опережающим, и синхронный
двигатель будет генерировать реактивную
мощность (см. рис. 4.28в). Зависимость тока
статора от тока возбуждения синхронного
двигателя отражаетсяU-образными
характеристиками синхронного двигателя,
представленными на рис.4.29.
4.8. Асинхронный двигатель, как динамический объект
Динамические свойства асинхронного двигателя следует рассматривать для двух случаев.
Первый – когда двигатель работает на рабочей части механической характеристики с малыми скольжениями при постоянном потоке статора, и переходные режимы связаны, прежде всего, с изменениями нагрузки на валу двигателя. Второй случай – когда изменяется во времени поток двигателя; этот случай характерен для условий пуска при подаче напряжения на обмотки статора.
Рассмотрим первый случай. Формулу Клосса (4.30) для этого случая можно упростить, поскольку при малых скольжениях членом s/sК в знаменателе можно пренебречь и, считая рабочую часть механической характеристики в пределах скольжений от 0 до sК линейной, получим
![]() (4.47)
(4.47)
где
![]() - жесткость линеаризированной рабочей
части механической характеристики
асинхронного двигателя.
- жесткость линеаризированной рабочей
части механической характеристики
асинхронного двигателя.
При малых скольжениях
ток ротора можно приближенно считать
активным, поэтому момент двигателя
пропорционален току. При приложении
нагрузки к валу двигателя скольжение
увеличивается, увеличивается э.д.с.
ротора и возрастает ток ротора. Однако
из-за значительной индуктивности обмоток
двигателя нарастание тока протекает
во времени примерно по экспоненциальному
закону с постоянной времени
 ,
где
,
где![]() .
.
Поскольку момент пропорционален току I2, то по аналогии с (3.9)
![]() .
(4.48)
.
(4.48)
Исходя из выражений (4.47), (4.48) и уравнения движения, можно составить структурную схему асинхронного двигателя при постоянной величине электромагнитного потока статора (рис.4.30).
И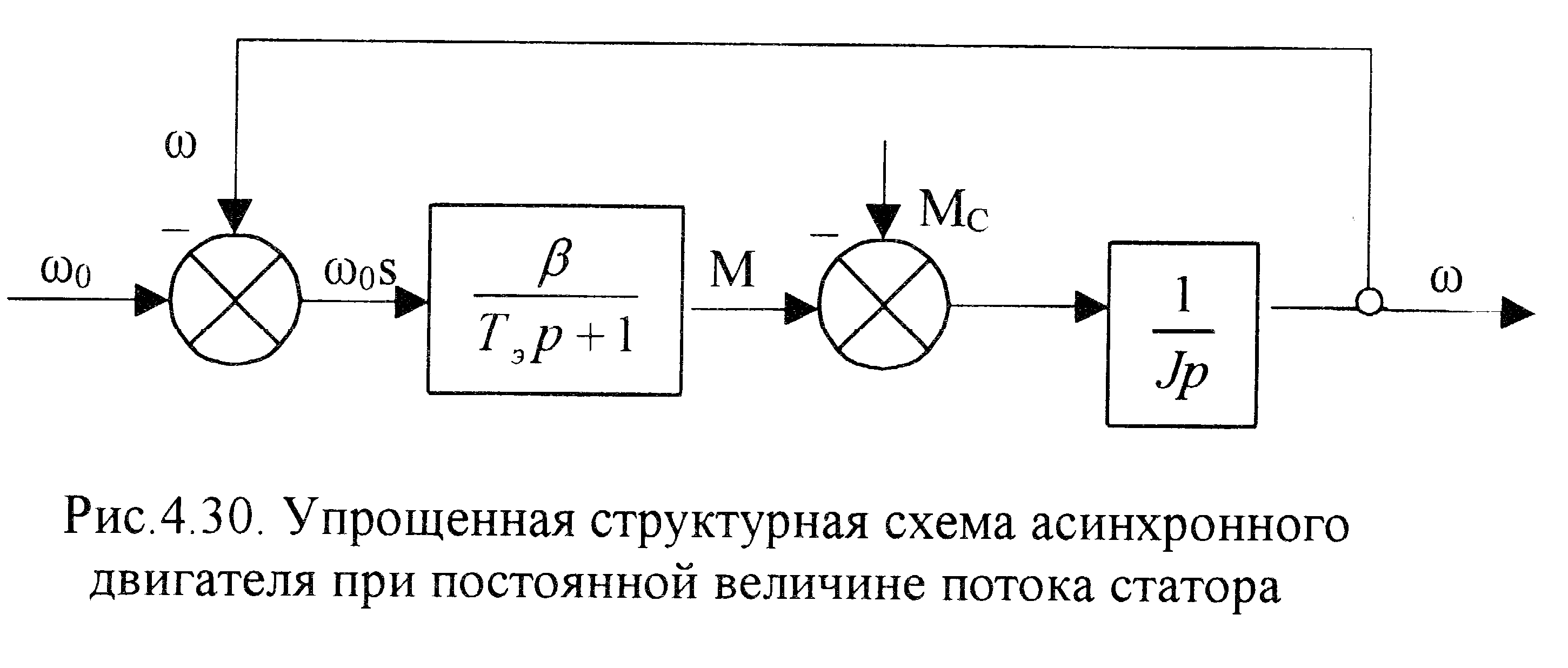 з
этой схемы следует, что при приложе-нии
нагрузки к валу двигателя, его скорость
будет изме-няться в соот-ветствии с
передаточной функцией.
з
этой схемы следует, что при приложе-нии
нагрузки к валу двигателя, его скорость
будет изме-няться в соот-ветствии с
передаточной функцией.
![]() ,
(4.50)
,
(4.50)
где
![]() - электромеханическая постоянная
времени. Это выражение полностью
соответствует формуле (3.14).
- электромеханическая постоянная
времени. Это выражение полностью
соответствует формуле (3.14).
При приложении
нагрузки к валу двигателя его скорость
уменьшится, возрастет скольжение, и,
следовательно, э.д.с. ротора
![]() ,
благодаря чему увеличатся токи ротора
и статора.
,
благодаря чему увеличатся токи ротора
и статора.
Как уже указывалось в §3.4, характер переходного процесса зависит от соотношения постоянных времени: электромеханической ТМ и электромагнитной ТЭ. Если ТМ>4ТЭ, то корни характеристического уравнения будут действительными и переходный процесс будет носить характер, близкий апериодическому (см.рис.3.11). Если корни характеристического уравнения будут комплексно сопряженными с отрицательной действительной частью, что будет иметь место при ТМ<4ТЭ, то характер изменения скорости при скачкообразном приложении нагрузки будет колебательным с затуханием, как показано на рис.3.11.
 Переходные
процессы, происходящие в асин-хронном
двигателе при его включении в сеть и
разгоне до рабочей ско-рости, связаны
со слож-ными электромагнитны-ми
процессами, происходящим в двигателе
и связанными с формирова-нием
электромагнитного поля, вращающегося
в пространстве со скорос-тью ω0.
Переходные
процессы, происходящие в асин-хронном
двигателе при его включении в сеть и
разгоне до рабочей ско-рости, связаны
со слож-ными электромагнитны-ми
процессами, происходящим в двигателе
и связанными с формирова-нием
электромагнитного поля, вращающегося
в пространстве со скорос-тью ω0.
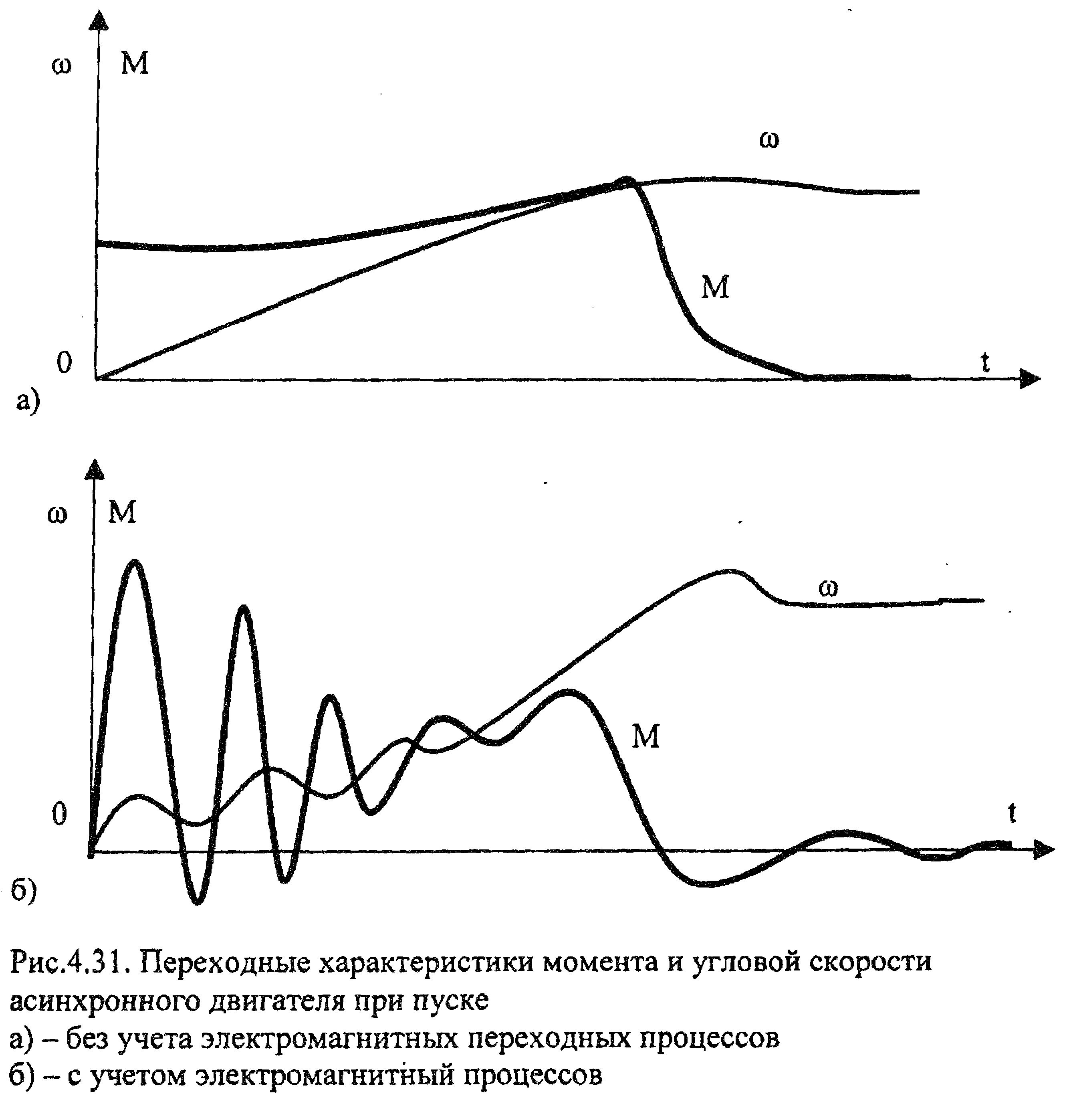
Рис.4.31.
Переходные характеристики момента и
угловой скорости асинхронного двигателя
при пуске: а) без учета электромагнитных
переходных процессов, б) с учетом
Максимальное значение переходного момента может в несколько раз превышать пусковой момент двигателя, а в начале разгона переходный момент может иметь и отрицательные значения. На рис.4.31 показано сравнение переходных характеристик ω=f(t) и M=f(t) асинхронного короткозамкнутого двигателя при пуске вхолостую. Характеристики, показанные на графике рис.4.31а построены без учета электромагнитных переходных процессов, здесь кривая момента соответствует механической характеристике двигателя. На рис.4.31б представлены переходные характеристики, построенные с учетом переходных электромагнитных процессов, связанных с формированием вращающегося электромагнитного поля статора и токов ротора в процессе включения обмоток статора в сеть и разгона до установившейся скорости (в данном случае до ω0). Из рассмотрения характеристики M=f(t) видно, что величина момента колеблется относительно значений момента, определенных по механической характеристике двигателя. Ввиду значительной сложности анализа рассматриваемых процессов для более подробного изучения читателям следует обратиться к дополнительной литературе [1-3].