

Необходимо обеспечение плавности переходных процессов – ограничение ускорения и рывка с целью исключения раскачивания или пробуксовки механизма и снижения динамических усилий при наличии упругих связей. Желательно [4-17], чтобы при пуске привод конвейера имел характеристику с постепенным увеличением пускового момента до начала трогания конвейерной ленты и ограниченной величиной момента в процессе разгона до номинальной скорости.
При работе с несколькими приводными барабанами привод должен обеспечивать синхронизацию работы приводных барабанов, т.е. установления расчетного распределения тягового усилия между приводными барабанами.
Приводы мощных конвейеров с высокой скоростью движения ленты должны обеспечивать пониженную скорость 1м/с для проведения ее осмотра.
Привод мощных конвейеров должен обеспечивать реверс в режиме местного управления.
25.1.2. Определение нагрузок конвейера и расчет мощности электродвигателя
С Рис.25.1.
Прямолинейный участок конвейера
В
Рис.25.2. Участок
изгиба тягового элемента
![]() ,
,
где: q - весовая нагрузка на 1 метр пути, Н/м. В весовую нагрузку входят вес транспортируемого материала, вес ленты и вес опорных роликов; l - длина участка в метрах; β - угол наклона конвейера (рис.25.1); Сп - результирующий коэффициент сопротивления движению на прямолинейном участке.
В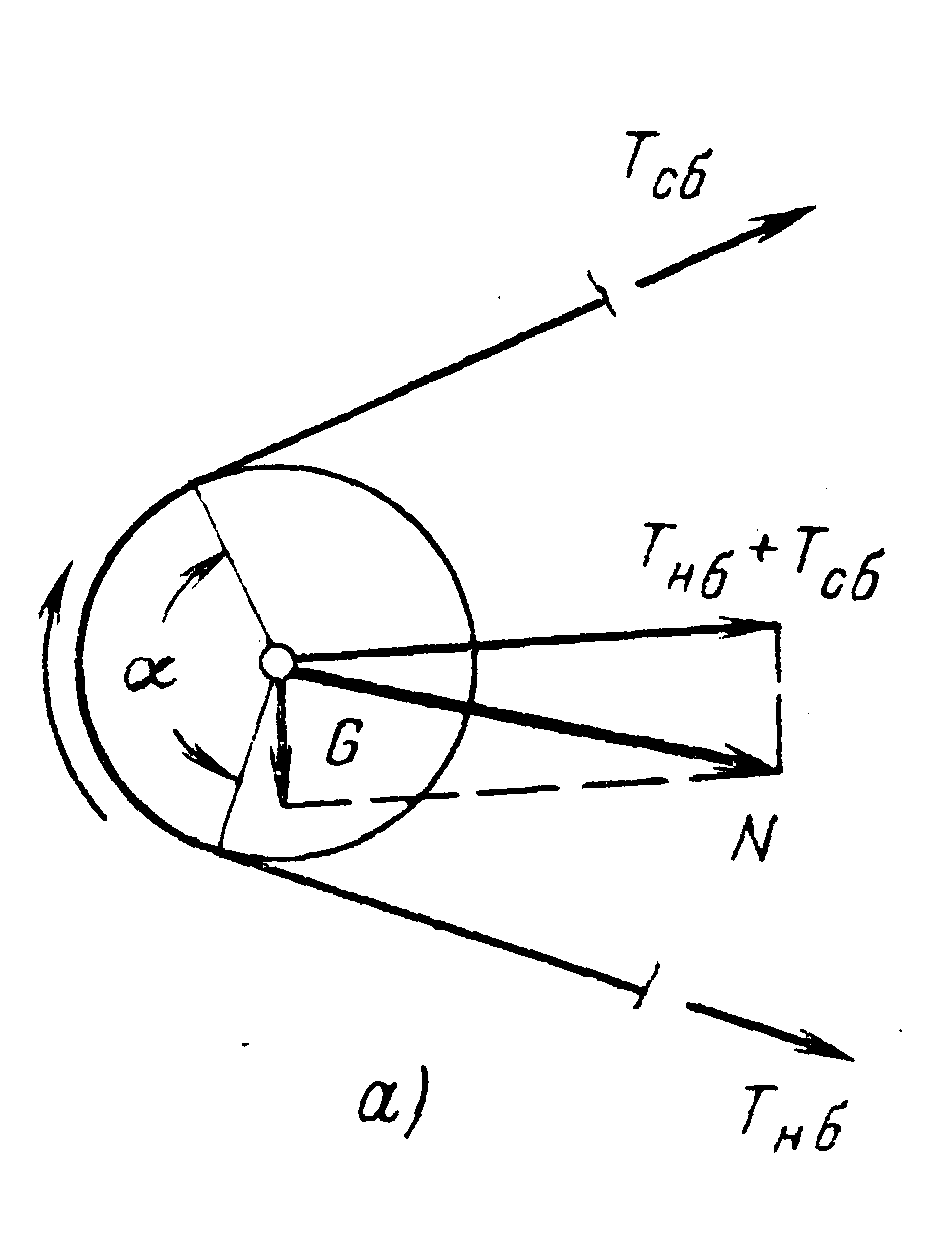 расчетах для ленточных и цепных конвейеровСп
принимают в пределах 0,03...0,06 [4-18] в
зависимости от условий окружающей среды
и транспортируемого материала (пыль,
температурные изменения и т.д.).
расчетах для ленточных и цепных конвейеровСп
принимают в пределах 0,03...0,06 [4-18] в
зависимости от условий окружающей среды
и транспортируемого материала (пыль,
температурные изменения и т.д.).
Весовую нагрузку от роликов определяют по формуле:
![]()
г
Рис.25.2.
Участок изгиба тягового элемента
Массу груза на один метр длины определяют из соотношения
![]()
где: Qn - производительность конвейера, т/час; V - скорость, м/с.
На участках изгиба (рис.25.2) сила сопротивления движению состоит из двух слагаемых: силы от изгиба тягового элемента, пропорциональной натяжению в набегающей точке участка Тнб, и силы трения в подшипниках блоков или роликов, пропорциональной равнодействующей силе N на участке. Следовательно:
![]()
где: ε - коэффициент от изгиба тягового элемента.
В конвейерных установках обычно Тнб>>G, ΔFи<<Тнб. Поэтому при определении равнодействующей N весом блока G пренебрегают и принимают, что натяжение в набегающей Тнб и сбегающей Тсб точках равны. При этом
![]()
где:
![]() - результирующий коэффициент на участке
изгиба.
- результирующий коэффициент на участке
изгиба.
Для ленточного конвейера при изгибе ленты на барабане и α=90...1800 Си=(4...6) 10-2, а при изгибе ленты на роликовой батарее и угле обхвата α=20-450 Си=(1,2...3) 10-2.
Сила сопротивления вызывает увеличение натяжения тягового элемента на каждом участке. Для прямолинейного участка Тсб=Тнб+ΔFn, для участка изгиба Тсб=Тнб+ΔFи=КиТнб, где Ки=1+Си – коэффициент увеличения натяжения на данном участке.
Результирующая сила сопротивления движению определяется как сумма сил всех участков
![]() Так как силу
Fст
должен
преодолеть приводной элемент, то при
установившемся движении разность
натяжений на нем уравновешивается силой
сопротивления:
Так как силу
Fст
должен
преодолеть приводной элемент, то при
установившемся движении разность
натяжений на нем уравновешивается силой
сопротивления:
![]()
Усилие Тсб должно быть не меньше минимально допустимого натяжения Тсб≥То. Минимальное натяжение определяется условием допустимого провиса тягового органа.
Минимальное натяжение по условию провиса определяется уравнением [4-18]:
![]() Н,
Н,
где: qг, qо - масса груза и ленты конвейера на 1 метр длины, кг/м; l - шаг установки роликов на рабочей ветви, м; Yмакс=(0,025...0,03) - допустимая величина провисания ленты, м,
По условию сцепления
![]()
где: α - угол обхвата барабана в радианах; f=0,1...0,35 - коэффициент трения между лентой и барабаном; Тнб=То+Fст+ma - набегающее натяжение приводного барабана; m - масса поступательно движущихся частей конвейера; а - ускорение при пуске.
Из двух результатов выбирается большее значение.
Динамические нагрузки привода конвейера возникают в процессе пуска и определяются движущимися массами собственно конвейера и его приводной станции
![]()
где: Fдин
- динамическая
сила на обводе приводного элемента с
радиусом Rп;
mi
- движущаяся
масса одного прямолинейного участка
совместно с массой предшествующего
участка изгиба (для роликов
![]() ,n
– количество
роликов); Jдв,
Jп
- момент
инерции двигателя и приводного элемента
(барабана, редуктора); ip
- передаточное
число редуктора приводной станции; ап
- ускорение
конвейера.
,n
– количество
роликов); Jдв,
Jп
- момент
инерции двигателя и приводного элемента
(барабана, редуктора); ip
- передаточное
число редуктора приводной станции; ап
- ускорение
конвейера.
Момент на валу электродвигателя при пуске
![]()
Т Рис.25.3.
Эквивалентная двухмассовая схема
конвейера
Для снижения этих усилий необходимо уменьшить ускорение, а в начале пуска при нулевой скорости осуществить натяжение упругого элемента. Время разгона следует принимать кратное периоду собственных колебаний системы. Определение этого периода при пуске с задатчиком интенсивности и при ограничениях тока различно (см. гл.23). Жесткость ленты определяется
![]()
где: Е - модуль упругости Н/м2 [4-19]; В, h – ширина и толщина ленты, м; L - длина рабочего участка, м.
Мощность на валу приводного электродвигателя в общем случае определяется по формуле
![]()
где: Fc.макс - максимальное статическое усилие, Н; V - заданная скорость перемещения, м/с; η - кпд передачи; К - коэффициент запаса (1,1...1,2), отражающий дополнительные усилия и неучтенные нагрузки.
Для конвейера мощность может определяться по приближенной формуле:
![]() кВт;
(25.2)
кВт;
(25.2)
где:
![]() - линейные массы ленты, груза, рабочих
и холостых роликов, кг/м;Lг
-
горизонтальная проекция длины конвейера,
м; W=(0,02...0,06)
- обобщенный коэффициент сопротивления
движению; С
- коэффициент, учитывающий мощность,
необходимую для изгиба ленты на барабанах
и преодоления других сопротивлений
(табл.25.1); Q
- производительность конвейера, т/час;
V
- скорость движения ленты, м/с; Н
- высота подъема конвейера, м.
- линейные массы ленты, груза, рабочих
и холостых роликов, кг/м;Lг
-
горизонтальная проекция длины конвейера,
м; W=(0,02...0,06)
- обобщенный коэффициент сопротивления
движению; С
- коэффициент, учитывающий мощность,
необходимую для изгиба ленты на барабанах
и преодоления других сопротивлений
(табл.25.1); Q
- производительность конвейера, т/час;
V
- скорость движения ленты, м/с; Н
- высота подъема конвейера, м.
Значение коэффициента С от Lг дано в таблице 25.1.
Таблица 25.1
|
Lг |
3 |
10 |
20 |
50 |
100 |
180 |
400 |
600 |
1000 |
1500 |
|
С |
9 |
4,5 |
3,2 |
2,2 |
1,75 |
1,5 |
1,2 |
1,15 |
1,08 |
1,05 |
Для неуказанных значений С можно определять из соотношения:
![]()
где: С0, С1 - коэффициенты для предыдущего и последующего значений длины конвейера; L0, L1, X - предыдущая, последующая и фактическая горизонтальная проекция длины конвейера.
Для механизмов, имеющих неизменную нагрузку (конвейеры, канатные дороги), нагрузочная диаграмма соответствует режиму работы S1, расчет мощности производится для режима S1.
В Рис.25.4.
Механическая характеристика конвейера
Пусковое усилие электродвигателя не должно превышать сил сцепления ленты с приводным барабаном (шкивом).