

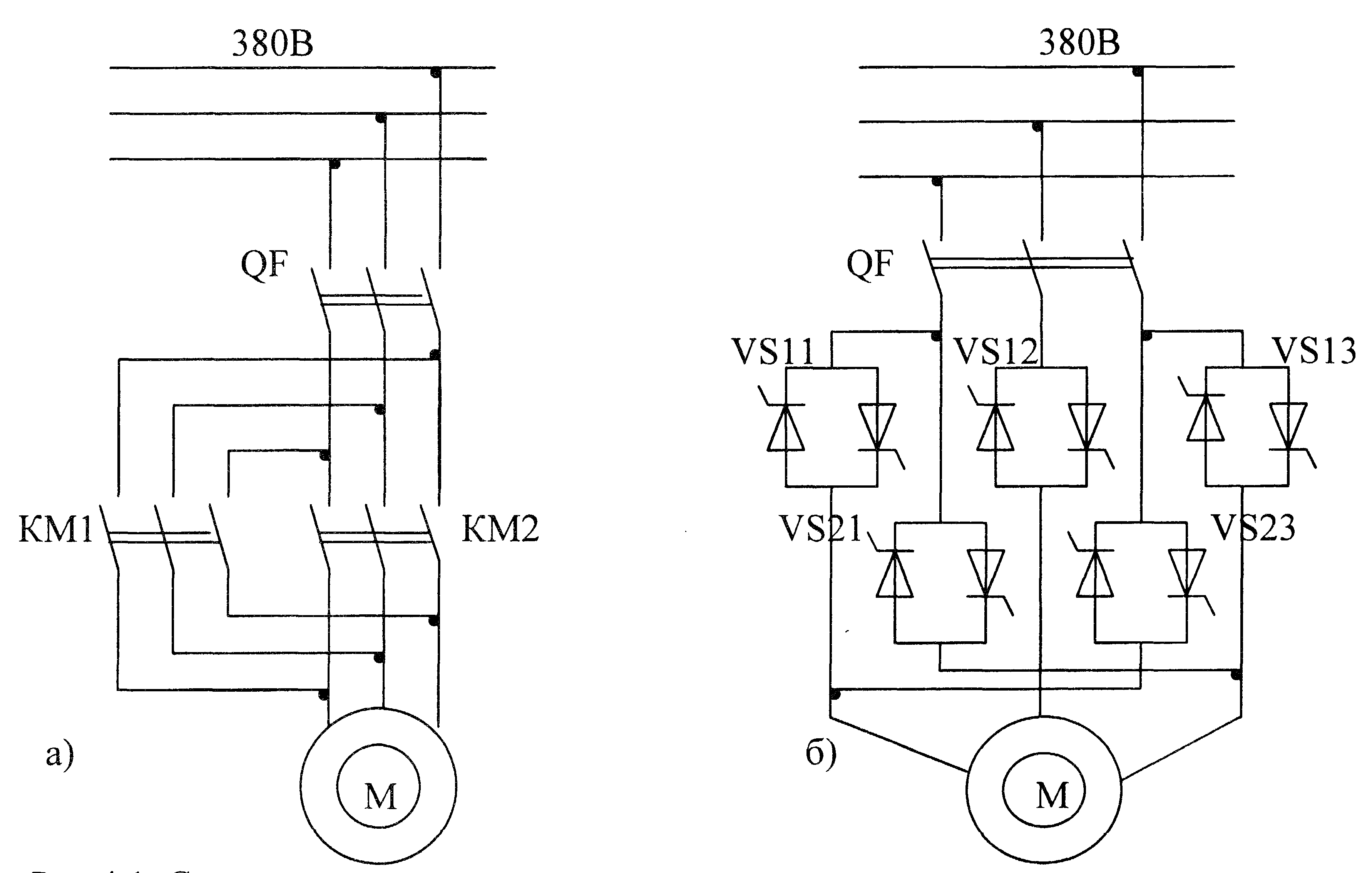
Рис.4.1. Схемы включения асинхронного короткозамкнутого двигателя с использованием контактного (а) и бесконтактного (б) пускателей
Для нерегулируемых приводов с синхронными двигателями кроме указанных функций управления необходимо также регулирование тока возбуждения. Принципы регулирования возбуждения синхронных машин рассмотрены в §4.7.
Основной характеристикой нерегулируемого электропривода являются номинальные данные приводного электродвигателя, т.е. те данные, которые относятся к основному расчетному режиму работы двигателя. Номинальная мощность определяется как мощность на валу двигателя, на которую он рассчитан по условиям нагревания в длительном режиме работы или в том режиме, для которого этот двигатель предназначен. К номинальным данным относятся также частота и напряжение питания, скорость вращения, ток в обмотках, кпд и cosφ, соответствующие номинальному режиму работы.
При выборе номинальных параметров нерегулируемого электропривода возникает задача выбора величины передаточного коэффициента редуктора (или другой передачи), соединяющего вал электродвигателя с рабочим органом машины. Асинхронные электродвигатели выпускаются с высокими скоростям вращения (синхронная скорость 3000, 1500, 1000, 750, 600об/мин), в то время как скорость рабочего органа, как правило, требуется значительно ниже. Для снижения скорости и соответствующего повышения момента на валу рабочего органа необходимо использование понижающей передачи (редуктора).
Масса и габаритные размеры электродвигателя определяются не его номинальной мощностью, а номинальным моментом двигателя
![]() .
.
Номинальный момент двигателя пропорционален объему активных частей электрической машины и принятыми для этой машины электрическими и электромагнитными нагрузками: допустимой плотностью тока в обмотках А (А/мм2) и индукцией в магнитопроводе В (Тл), т.е. приблизительно
![]() ,
,
где D и L – диаметр и длина активной части ротора (якоря) двигателя.
С учетом неактивных частей электрической машины (станины, подшипниковых щитов и др.) соотношение между весом и номинальным моментом не будет строго пропорциональным, однако приближенно для двигателей одной серии можно считать, что вес и габариты двигателя примерно пропорциональны его номинальному моменту.
Исходя из этого, конструктору при выборе привода следует выбирать, чему отдать предпочтение: электродвигателю меньшего веса и меньших габаритов, но с редуктором, имеющим большее передаточное отношение, или большему по габаритам и весу электродвигателю, но в сочетании с более простым редуктором с меньшим передаточным отношением или вообще обойтись без механической передачи, т.е. применить безредукторный электропривод.
Выбор производится, исходя из технико-экономических соображений и удобства компановки конструкции рабочей машины в целом.
Для нерегулируемых приводов малой и средней мощности (до 200кВт), как правило, применяются редукторные электроприводы. Наиболее современным конструкторским решением является использование мотор-редукторов, в которых электродвигатель и редуктор конструктивно объединены в одно целое.
Для регулируемых электроприводов (особенно высокоточных) стремятся избежать, когда это возможно, использования редуктора и применяют безредукторные электроприводы, в которых вал электродвигателя непосредственно соединяется с рабочим органом машины.
Для электроприводов (в том числе и нерегулируемых), работающих с большим числом пусков и остановов стремятся минимизировать время пуска привода (tП).
Из уравнения движения электропривода (2.8), полагая МС=0 и пусковой момент двигателя (МП) постоянным (средним) во время пуска, получим
![]() , (4.1)
, (4.1)
где:
![]() - номинальная скорость рабочего органа;
- номинальная скорость рабочего органа;
JП – момент инерции передачи, приведенный к валу двигателя.
Из (4.1) получим:
![]() .
.
Полагая
![]() ,
найдем оптимальное по условию минимизации
времени пуска передаточное отношение
редуктора:
,
найдем оптимальное по условию минимизации
времени пуска передаточное отношение
редуктора:
![]() . (4.2)
. (4.2)
4.2. Электромеханические свойства асинхронных двигателей
4.2.1. Принцип работы асинхронного двигателя
Наиболее распространенными электрическими двигателями в промышленности, сельском хозяйстве и во всех других сферах применения являются асинхронные двигатели. Можно сказать, что они являются основным средством преобразования электрической энергии в механическую.
Асинхронный
двигатель является трехфазной (может
быть двух или многофазной) индукционной
электрической машиной переменного
тока. На статоре двигателя располагаются
три распределенные обмотки, сдвинутые
друг относительно друга на 1200,
если число пар полюсов машины
![]() ,
как это показано на рис. 4.2а. Если число
пар полюсов (рП),
образуемых обмотками, более одного, то
соответственно увеличивается число
секций обмотки, и они будут сдвинуты
геометрически друг о
,
как это показано на рис. 4.2а. Если число
пар полюсов (рП),
образуемых обмотками, более одного, то
соответственно увеличивается число
секций обмотки, и они будут сдвинуты
геометрически друг о тносительно
друга уже не на 1200,
а на
тносительно
друга уже не на 1200,
а на![]() .
.
Ф
в
Р
Рис.4.2.
Схемы включения обмоток асинхронного
двигателя а![]() градусов и временному сдвигу трех фаз
напряжения, прикладываемого к обмоткам,
(фазы напряженийUA,
UB,
и UС
сдвинуты на 120 электрических градусов
-
градусов и временному сдвигу трех фаз
напряжения, прикладываемого к обмоткам,
(фазы напряженийUA,
UB,
и UС
сдвинуты на 120 электрических градусов
-
![]() радиан), резуль-тирующий вектор
магнитодви-жущих сил
радиан), резуль-тирующий вектор
магнитодви-жущих сил![]() ,
создаваемых током в обмотках двигателя,
равномерно перемещается по окружности
расточки статора со скоростью
,
создаваемых током в обмотках двигателя,
равномерно перемещается по окружности
расточки статора со скоростью
![]() , (4.3)
, (4.3)
где: f1 – частота синусоидального тока в обмотках статора;
рП – число пар полюсов машины.
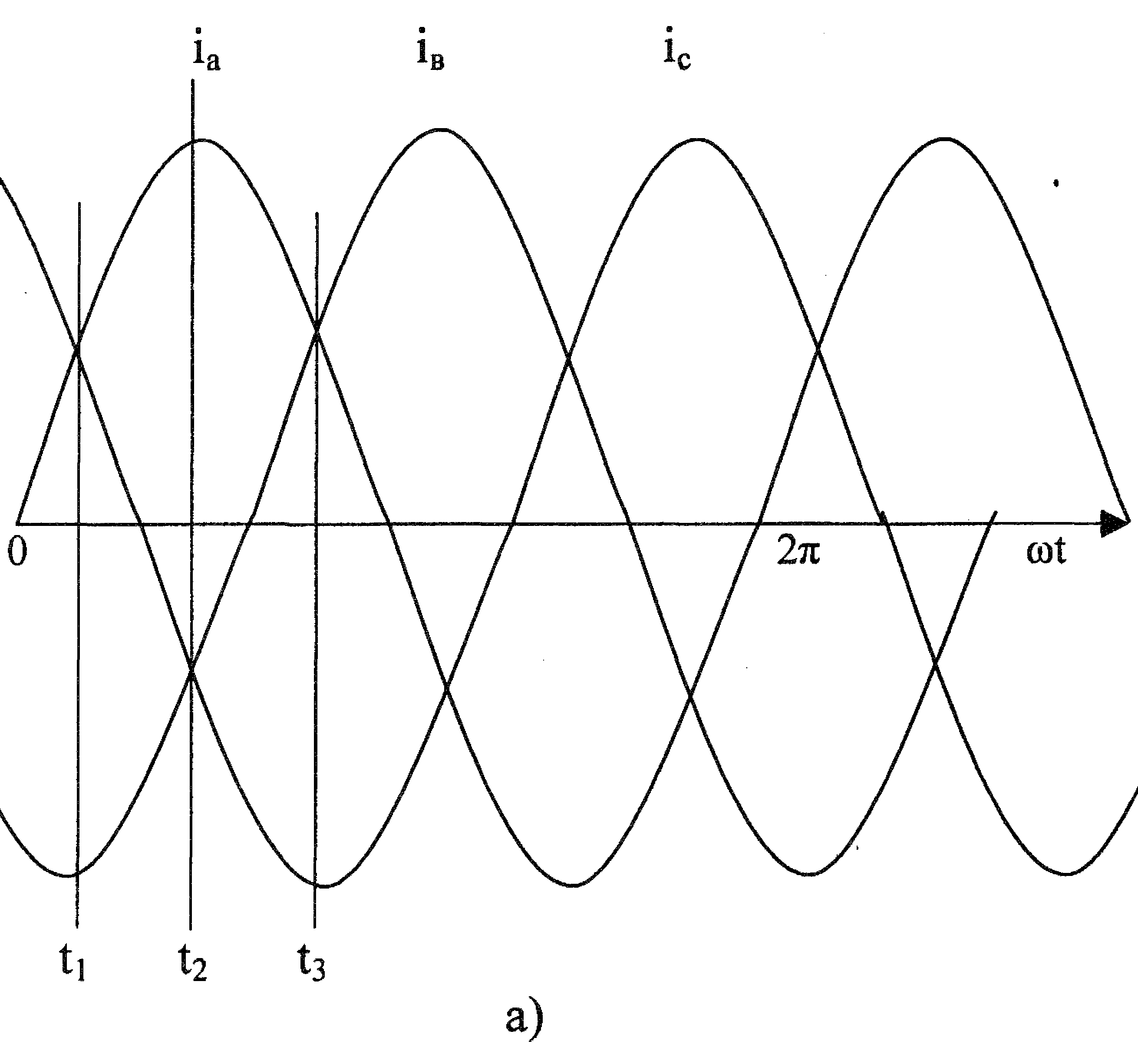
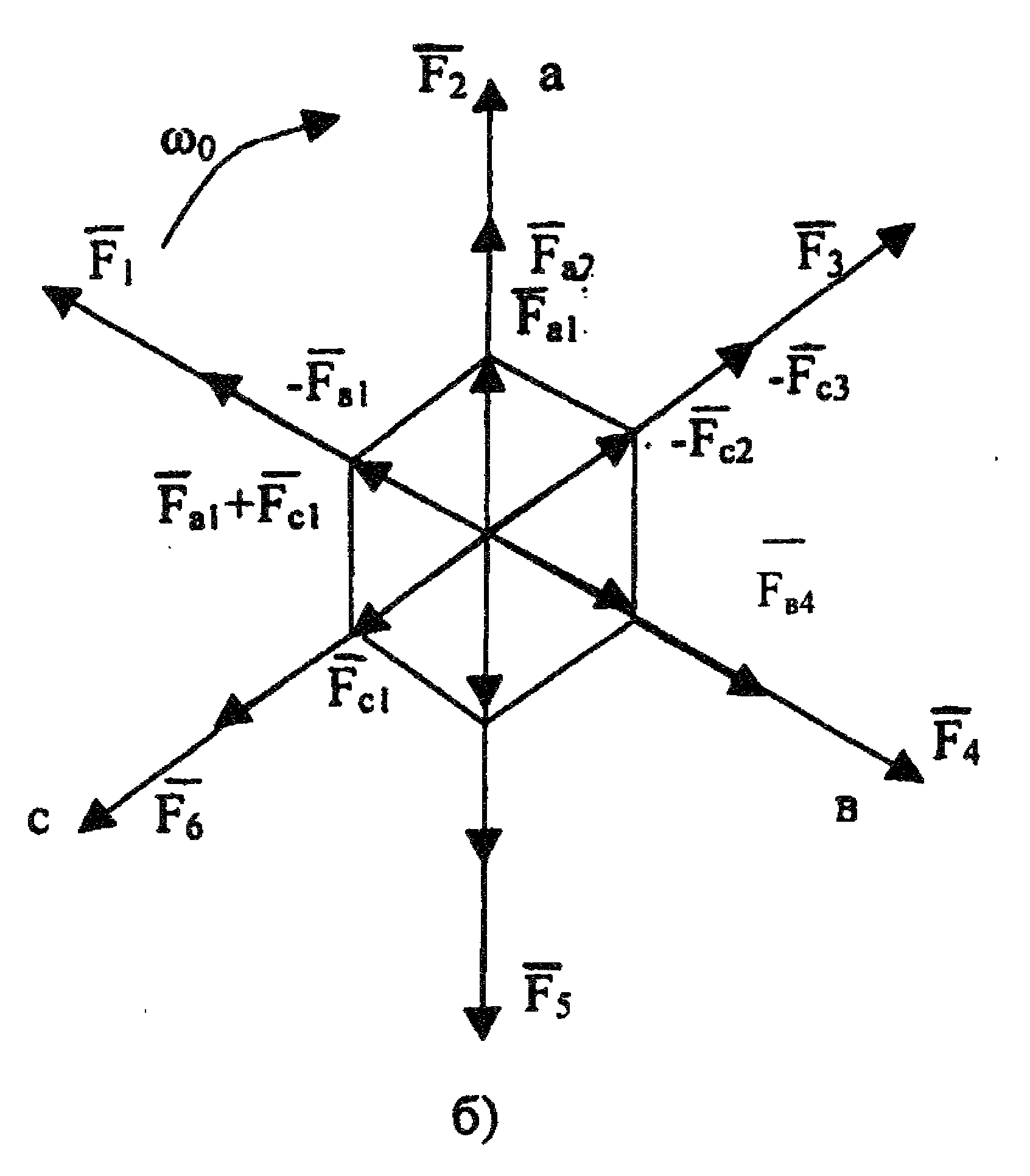
Рис.4.3. Принцип образования вращающегося электромагнитного поля
Принцип образования
вращающегося магнитного поля в обмотках
статора можно уяснить из рассмотрения
рис.4.3. На рис.4.3а представлена эпюра
системы трехфазных токов протекающих
по обмоткам статора (мгновенные значения
токов в обмотках фаз а,
в
и с
в зависимости от времени
![]() ).
Рассмотрим положение в пространстве
результирующего вектора м.д.с. статора
в момент времениt1.
).
Рассмотрим положение в пространстве
результирующего вектора м.д.с. статора
в момент времениt1.
![]() .
.
Вектор м.д.с. обмотки
а
![]() направлен по оси «а» в положительном
направлении и равен 0,5Iа.макс;
вектор м.д.с. обмотки с
направлен по оси «а» в положительном
направлении и равен 0,5Iа.макс;
вектор м.д.с. обмотки с
![]() направлен по оси «с» в положительном
направлении и равен 0,5Iс.макс.
Сумма векторов
направлен по оси «с» в положительном
направлении и равен 0,5Iс.макс.
Сумма векторов
![]() направлена по оси «в» в отрицательном
направлении; с этой суммой складывается
вектор м.д.с. обмотки «в», равныйIв.макс.
Сумма этих векторов образует
пространственный вектор
направлена по оси «в» в отрицательном
направлении; с этой суммой складывается
вектор м.д.с. обмотки «в», равныйIв.макс.
Сумма этих векторов образует
пространственный вектор
![]() ,
равный по модулю величине 3/2·Iмакс
и занимающий пространственное положение,
как показано на рис.4.3б.
,
равный по модулю величине 3/2·Iмакс
и занимающий пространственное положение,
как показано на рис.4.3б.
По прошествии
времени
![]() (при частоте 50Гц через
(при частоте 50Гц через![]() с.)
наступит момент времениt2,
при котором вектор м.д.с. обмотки «а»
с.)
наступит момент времениt2,
при котором вектор м.д.с. обмотки «а»
![]() имеет максимальное положительное
значение, а векторы м.д.с. обмоток «в» и
«с» – половинное отрицательное значение.
Результирующий вектор м.д.с.
имеет максимальное положительное
значение, а векторы м.д.с. обмоток «в» и
«с» – половинное отрицательное значение.
Результирующий вектор м.д.с.![]() займет в этот момент положение, показанное
на рис.4.3б, т.е. переместится по отношению
к предыдущему положению
займет в этот момент положение, показанное
на рис.4.3б, т.е. переместится по отношению
к предыдущему положению![]() на пространственный угол 600
по часовой стрелке. Нетрудно убедиться,
что в момент времени t3
результирующий
вектор м.д.с. обмоток статора займет
положение
на пространственный угол 600
по часовой стрелке. Нетрудно убедиться,
что в момент времени t3
результирующий
вектор м.д.с. обмоток статора займет
положение![]() ,
т.е. будет продолжать перемещаться в
пространстве по часовой стрелке. За
время периода питающего напряжения
результирующий вектор м.д.с.
,
т.е. будет продолжать перемещаться в
пространстве по часовой стрелке. За
время периода питающего напряжения
результирующий вектор м.д.с.![]() совершит полный оборот по часовой
стрелке.
совершит полный оборот по часовой
стрелке.
Предоставляем читателю самому убедиться, что при изменении порядка чередования фаз напряжения, подводимого к обмоткам двигателя (если, например, поменяем местами фазы В и С на рис.4.2б,в), то результирующий вектор потокосцепления будет вращаться против часовой стрелки, т.е. изменится направление вращения магнитного поля, образуемого токами в обмотках статора.
Если число пар
полюсов двигателя больше единицы, то
увеличивается число секций обмоток,
располагаемых по окружности статора.
Так, если число пар полюсов рП=2,
то все три фазные обмотки расположены
на одной половине окружности статора,
соответственно и на второй его половине.
В этом случае за время одного периода
питающего напряжения вектор м.д.с.
статора
![]() пройдет половину окружности, т.е.
повернется на 180 геометрических градусов,
и скорость вращения магнитного поля
статора будет вдвое меньше, чем у машин
срП=1.
Следовательно, скорость вращения
магнитного поля статора
пройдет половину окружности, т.е.
повернется на 180 геометрических градусов,
и скорость вращения магнитного поля
статора будет вдвое меньше, чем у машин
срП=1.
Следовательно, скорость вращения
магнитного поля статора
![]() (ее также называют синхронной скоростью)
обратно пропорциональна числу пар
полюсов машины и будет в соответствии
с (4.3).
(ее также называют синхронной скоростью)
обратно пропорциональна числу пар
полюсов машины и будет в соответствии
с (4.3).
В зависимости от конструкции ротора асинхронного двигателя различают асинхронные двигатели с фазным ротором и с короткозамкнутым ротором. В двигателях с фазным ротором на роторе располагается трехфазная распределенная обмотка, соединенная обычно в звезду, концы обмоток соединены с контактными кольцами, через которые электрические цепи ротора выводятся из машины для подключения к пусковым сопротивлениям с последующим закорачиванием обмоток. В короткозамкнутых двигателях обмотка выполнена в виде беличьей клетки – стержней, замкнутых накоротко с двух сторон кольцами. Несмотря на специфическое конструктивное устройство, беличью клетку также можно рассматривать как трехфазную обмотку, замкнутую накоротко.
|
Число пар полюсов |
Угловая скорость электромагнитного поля статора, 1/с |
Синхронная скорость асинхронного двигателя, об/мин |
Примерная ном. скорость двигателя, об/мин |
|
При
|
|
|
2940 |
|
При
|
|
|
1450 |
|
При
|
|
|
980 |
|
При
|
|
|
735 |
|
При
|
|
|
585 |
|
При
|
|
|
490 |
Электромагнитный момент в асинхронном двигателе создается благодаря взаимодействию вращающегося магнитного поля статора с активной составляющей тока ротора
![]() (4.4)
(4.4)
Ток ротора возникает
благодаря э.д.с. Е2,
которая индуктируется в обмотках ротора
вращающимся магнитным полем. Когда
ротор неподвижен, асинхронный двигатель
представляет собой трехфазный
трансформатор с обмотками замкнутыми
накоротко или нагруженными на пусковое
сопротивление. Возникающая при неподвижном
роторе в его обмотках э.д.с. называется
номинальной э.д.с. ротора Е2н.
Эта э.д.с. приблизительно равна фазному
напряжению статора, деленному на
коэффициент трансформации
![]()
![]() (4.5)
(4.5)
Величина э.д.с.
ротора Е2
при вращающемся двигателе и частота
этой э.д.с. (а значит, и частота тока в
обмотках ротора) f2
зависят от
частоты пересечения вращающимся полем
проводников обмотки ротора (в
короткозамкнутом двигателе – стержней).
Эта частота определяется разностью
скоростей поля статора
![]() и ротора
и ротора![]() .
Эта разность называется абсолютным
скольжением
.
Эта разность называется абсолютным
скольжением
![]() . (4.6)
. (4.6)
При анализе режимов работы асинхронного двигателя с постоянной частотой питающего напряжения (50Гц) обычно пользуются относительной величиной скольжения
![]() . (4.7)
. (4.7)
Когда ротор двигателя неподвижен, s=1.
Исходя из сказанного, наибольшая величина э.д.с. ротора при работе в двигательном режиме будет при неподвижном роторе (Е2н); по мере увеличения скорости (уменьшении скольжения) э.д.с. Е2 будет уменьшаться
![]() , (4.8)
, (4.8)
аналогично частота э.д.с. и тока ротора f2 при неподвижном роторе будет равна частоте тока статора f1, и по мере увеличения скорости будет уменьшаться пропорционально скольжению
![]() . (4.9)
. (4.9)
В номинальном режиме скорость ротора незначительно отличается от скорости поля, и номинальное скольжение составляет для двигателей общего применения мощностью 1,5-200кВт всего 2-3%, а для двигателей большей мощности порядка 1%. Соответственно в номинальном режиме э.д.с. ротора составляет 1-3% от номинального значения этой э.д.с. при s=1. Частота тока ротора в номинальном режиме будет составлять всего 0,5-1,5Гц. При s=0, если скорость ротора равна скорости поля, э.д.с. ротора Е2 и ток ротора I2 будут равны нулю, момент двигателя также будет равен нулю. Этот режим является режимом идеального холостого хода.
Зависимость частоты э.д.с. и тока ротора от скольжения определяет своеобразие механических характеристик асинхронного двигателя.