

4.2.2. Механические характеристики асинхронного двигателя
Рассмотрим работу асинхронного двигателя с фазным ротором, обмотки которого замкнуты накоротко.
Как уже указывалось
(4.4), момент двигателя пропорционален
потоку Ф
и активной составляющей тока ротора
![]() ,
приведенного к статору. Поток, создаваемый
обмотками статора, пропорционален
величине и частоте питающего напряжения
,
приведенного к статору. Поток, создаваемый
обмотками статора, пропорционален
величине и частоте питающего напряжения
![]() .
(4.10)
.
(4.10)
Ток ротора I2 равен
![]() ,
(4.11)
,
(4.11)
где Z2 – полное сопротивление обмотки ротора.
Следует учитывать,
что индуктивное сопротивление обмотки
ротора x2
является величиной переменной, зависящей
от частоты тока ротора, а, следовательно,
от скольжения
![]() .
.
При неподвижном
роторе при s=1
индуктивное сопротивление обмотки
ротора наибольшее. По мере роста скорости
(уменьшении скольжения) индуктивное
сопротивление ротора x2
уменьшается и при достижении номинальной
скорости составляет всего 1-3% от величины
сопротивления при s=1.
Обозначив
![]() ,
получим
,
получим
![]() .
(4.12)
.
(4.12)
Тогда
![]() .
(4.13)
.
(4.13)
Активная составляющая тока ротора
![]() .
(4.14)
.
(4.14)
где
![]() .
(4.15)
.
(4.15)
Приведем параметры
цепи ротора к обмотке статора с учетом
коэффициента трансформации
![]() .
Приведение параметров производится на
основе сохранения равенства мощности.
.
Приведение параметров производится на
основе сохранения равенства мощности.
![]() (4.16)
(4.16)
С учетом (4.16)
 и
и
 .
(4.17)
.
(4.17)
Разделив числитель и знаменатель формулы (4.17) на s, получим
 .
(4.18)
.
(4.18)
П
Рис.4.4.
Схемы замещения асинхронного двигателя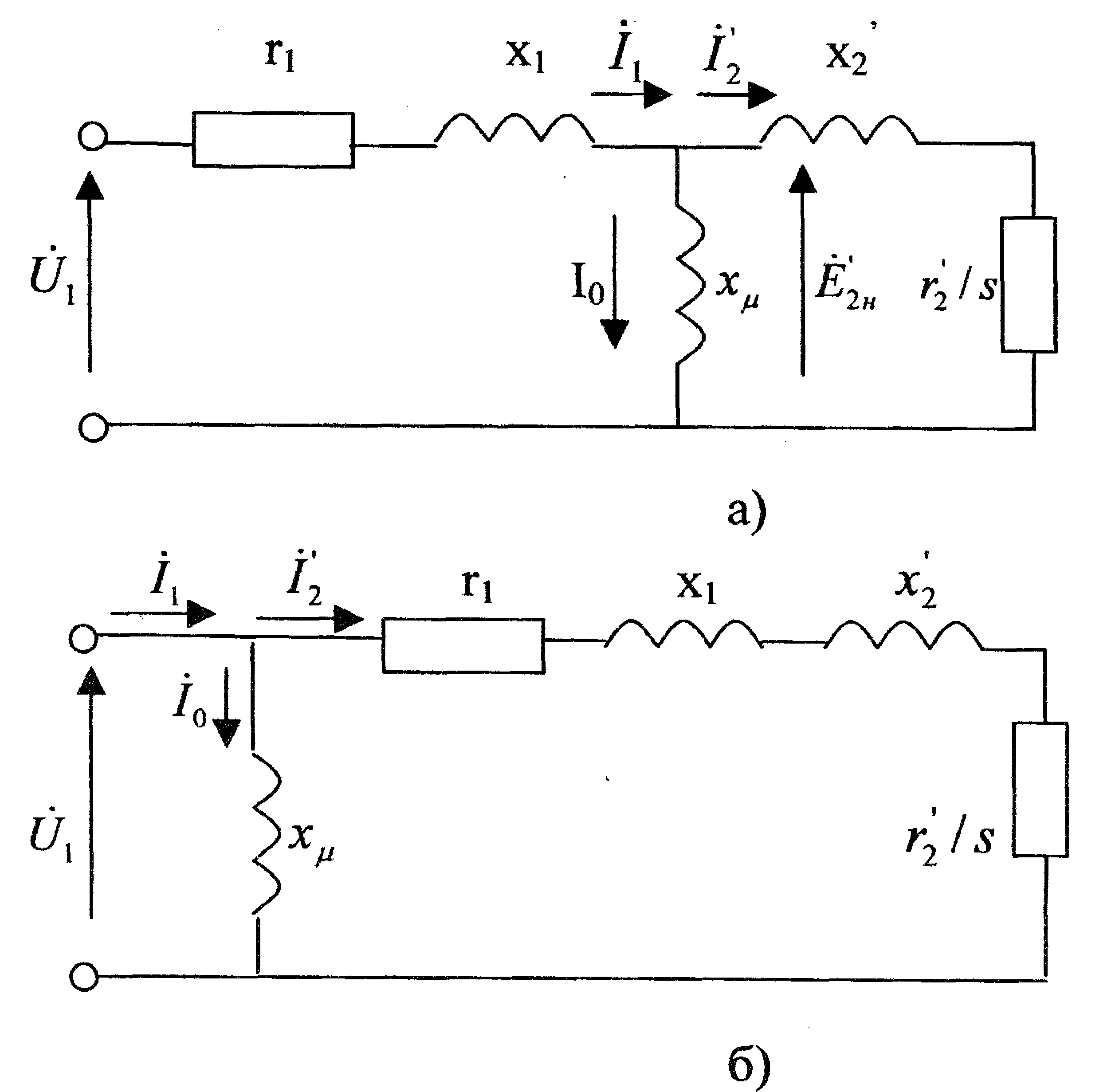 роведенная
мате-матическая опера-ция – деление
чис-лителя и знамена-теля наs,
конечно, не изменяет спра-ведливость
равенства (4.18), но носит формальный
харак-тер, что нужно учи-тывать при
рассмот-рении этого соотно-шения. В
действи-тельности как это следует из
исходной формулы (4.13) от скольжения
зависит величина индуктивного
сопротивления ротора x2,
а активное сопротивление r2
остается постоянным. Использование
выражения (4.18) позволяет по аналогии с
трансформатором составить схему
замещения асинхронного двигателя,
которая представлена на рис.4.4а. Для
анализа нерегулируемого электропривода
эту схему можно упростить, перенеся
контур намагничивания на зажимы
двигателя. Упрощенная П-образная схема
замещения представлена на рис.4.4б. Исходя
из этой схемы, ток ротора будет равен:
роведенная
мате-матическая опера-ция – деление
чис-лителя и знамена-теля наs,
конечно, не изменяет спра-ведливость
равенства (4.18), но носит формальный
харак-тер, что нужно учи-тывать при
рассмот-рении этого соотно-шения. В
действи-тельности как это следует из
исходной формулы (4.13) от скольжения
зависит величина индуктивного
сопротивления ротора x2,
а активное сопротивление r2
остается постоянным. Использование
выражения (4.18) позволяет по аналогии с
трансформатором составить схему
замещения асинхронного двигателя,
которая представлена на рис.4.4а. Для
анализа нерегулируемого электропривода
эту схему можно упростить, перенеся
контур намагничивания на зажимы
двигателя. Упрощенная П-образная схема
замещения представлена на рис.4.4б. Исходя
из этой схемы, ток ротора будет равен:
 ,
(4.19)
,
(4.19)
где:
![]() - индуктивное сопротивление короткого
замыкания.
- индуктивное сопротивление короткого
замыкания.
Активная составляющая тока ротора будет:
 .
(4.20)
.
(4.20)
Подставляя (4.10) и (4.20) в (4.4), получим выражение для момента асинхронного двигателя
 (4.21)
(4.21)
Рис.4.5.Примерные
механическая (1) и электромеханическая
характеристики (2) асинхронного двигателя
с фазным ротором, замкнутым накоротко

Рис.4.6.
Упрощенная векторная диаграмма
асинхронного двигателя
- -
Это выражение
отражает механическую характеристику
асинхронного двигателя
![]() .
Характеристика асинхронного двигателя
с фазным ротором, обмотки которого
замкнуты накоротко, представлена на
рис.4.5. Здесь же представлена
электромеханическая характеристика
двигателя
.
Характеристика асинхронного двигателя
с фазным ротором, обмотки которого
замкнуты накоротко, представлена на
рис.4.5. Здесь же представлена
электромеханическая характеристика
двигателя![]() ,
определяемая из векторной диаграммы
асинхронного двигателя рис.4.6,
,
определяемая из векторной диаграммы
асинхронного двигателя рис.4.6,![]() .
.
Полагая ток намагничивания реактивным, получим
![]() ,
(4.22)
,
(4.22)
где:
 .
(4.23)
.
(4.23)
Приравняв производную
![]() ,
найдем максимальное значение момента
асинхронного двигателяМк
и соответствующее
ему значение скольжения sк.
,
найдем максимальное значение момента
асинхронного двигателяМк
и соответствующее
ему значение скольжения sк.
 .
(4.24)
.
(4.24)
Отношение максимального момента к номинальному называется перегрузочной способностью асинхронного двигателя
![]() (4.25)
(4.25)
![]() ,
(4.26)
,
(4.26)
где: sк – критическое скольжение; знак (+) означает, что эта величина относится к двигательному режиму, знак (-) – к генераторному режиму рекуперативного торможения.
С учетом (4.24) и (4.25) формулу механической характеристики (4.21) можно преобразовать к более удобному для пользования выражению – формуле Клосса.
![]() ,
(4.27)
,
(4.27)
где:
![]() .
.
Для двигателей
мощностью более 15кВт сопротивление r1
невелико и при частоте 50Гц значительно
меньше хк.
Поэтому в приведенных выше выражениях
величиной r1
можно пренебречь. Тогда
![]() ,
(4.28)
,
(4.28)
![]() ,
или
,
или![]() (4.29)
(4.29)
где: sн – номинальное скольжение двигателя.
Формула Клосса, если пренебречь r1, будет иметь вид:
![]() .
(4.30)
.
(4.30)
По формулам (4.29) и
(4.30) можно рассчитать механическую
характеристику асинхронного двигателя,
пользуясь его паспортными данными, зная
номинальный момент Мн,
номинальное скольжение sн
и перегрузочную способность двигателя
![]() .
.
Проанализируем особенности механической характеристики асинхронного двигателя (см.рис.4.5). Она носит нелинейный характер и состоит из двух частей. Первая – рабочая часть – в пределах скольжения от 0 до sк. Эта часть характеристики близка к линейной и имеет отрицательную жесткость. Здесь момент, развиваемый двигателем, примерно пропорционален току статора I1 и ротора I2. Так как на этой части характеристики s<sк, то второе слагаемое знаменателя в формуле (4.30) существенно меньше первого, и им можно пренебречь. Тогда рабочую часть механической характеристики можно приближенно представить в линейной форме, где момент пропорционален скольжению.
![]() .
(4.31)
.
(4.31)
Вторая часть
механической характеристики асинхронного
двигателя при скольжениях, больших sк
(s>sк)
криволинейная, с положительным значением
жесткости
![]() .
Несмотря на то, что ток двигателя по
мере роста скольжения увеличивается,
момент, напротив, уменьшается. Если
рассматривать характеристику асинхронного
двигателя с фазным ротором, обмотки
которого во внешней цепи замкнуты
накоротко, то пусковой ток такого
двигателя (при
.
Несмотря на то, что ток двигателя по
мере роста скольжения увеличивается,
момент, напротив, уменьшается. Если
рассматривать характеристику асинхронного
двигателя с фазным ротором, обмотки
которого во внешней цепи замкнуты
накоротко, то пусковой ток такого
двигателя (при![]() иs=1)
будет очень большим и превысит номинальный
в 10-12 раз. В то же время пусковой момент
составит порядка 0,4-0,5 номинального. Как
будет показано в следующем параграфе,
для короткозамкнутых двигателей пусковой
ток будет (5,5-7,0)Iн,
а пусковой момент (0,9-1,3)Мн.
иs=1)
будет очень большим и превысит номинальный
в 10-12 раз. В то же время пусковой момент
составит порядка 0,4-0,5 номинального. Как
будет показано в следующем параграфе,
для короткозамкнутых двигателей пусковой
ток будет (5,5-7,0)Iн,
а пусковой момент (0,9-1,3)Мн.
Для объяснения такого несоответствия между величинами пускового тока и момента рассмотрим векторные диаграммы цепи ротора (рис.4.7) для двух случаев: а) когда скольжение велико (пусковая часть характеристики); б) когда скольжение мало (рабочая часть характеристики). При пуске, когда s=1, частота тока ротора равна частоте питающей сети (f2=50Гц). Индуктивное сопротивление обмотки ротора (см.4.12) велико и существенно превосходит активное сопротивление ротора r2, ток отстает от
э .д.с.
ротора на большой угол
.д.с.
ротора на большой угол![]() ,
т.е. ток ротора, в основном, реактивный.
Поскольку э.д.с. ротора в этом случае
будет велика
,
т.е. ток ротора, в основном, реактивный.
Поскольку э.д.с. ротора в этом случае
будет велика![]() ,
то и пусковой ток будет очень большим,
однако из-за малого значения
,
то и пусковой ток будет очень большим,
однако из-за малого значения![]() актив-ная составляющая тока ротораI2а
будет невелика, а, следовательно, момент,
развиваемый двигателем, будет также
невелик.
актив-ная составляющая тока ротораI2а
будет невелика, а, следовательно, момент,
развиваемый двигателем, будет также
невелик.
При разгоне
двигателя сколь-жение уменьшается,
э.д.с. ротора, частота тока ротора,
индуктивное сопротивление ротора
пропорци-онально уменьшаются.
Соответ-ственно уменьшается величина
полного тока ротора и статора, однако,
вследствие повышения
![]() активная составляющая тока ротора
растет и возрастает момент двигателя.
активная составляющая тока ротора
растет и возрастает момент двигателя.
Когда скольжение двигателя станет меньше sк, то частота тока ротора уменьшится настолько, что индуктивное сопротивление станет уже меньше активного, и ток ротора будет практически активным (см.рис.4.7б), момент двигателя будет пропорционален току ротора. Так, если номинальное скольжение двигателя sн=2%, то по сравнению с пусковыми параметрами частота тока ротора уменьшится в 50 раз, соответственно уменьшится индуктивное сопротивление ротора. Поэтому, несмотря на то, что э.д.с. ротора также уменьшится в 50 раз, она будет достаточна для создания номинального тока ротора, обеспечивающего номинальный момент двигателя. Таким образом, своеобразие механической характеристики асинхронного двигателя определяется зависимостью индуктивного сопротивления ротора от скольжения.