

4.3. Режимы работы асинхронного двигателя
4.3.1. Энергетическая диаграмма асинхронного двигателя при работе в двигательном режиме
Работе в двигательном режиме соответствует скольжение s в пределах от 1 до 0, причем рабочим режимом является диапазон скоростей, при которых скольжение не превышает sк. В диапазоне скольжений от sк до 1 потери в роторе двигателя существенно возрастают, поэтому этот участок механической характеристики двигатель проходит только во время пуска. Проведем анализ распределения потоков электрической энергии при различных значениях скольжения асинхронного двигателя.
 На рис.4.11
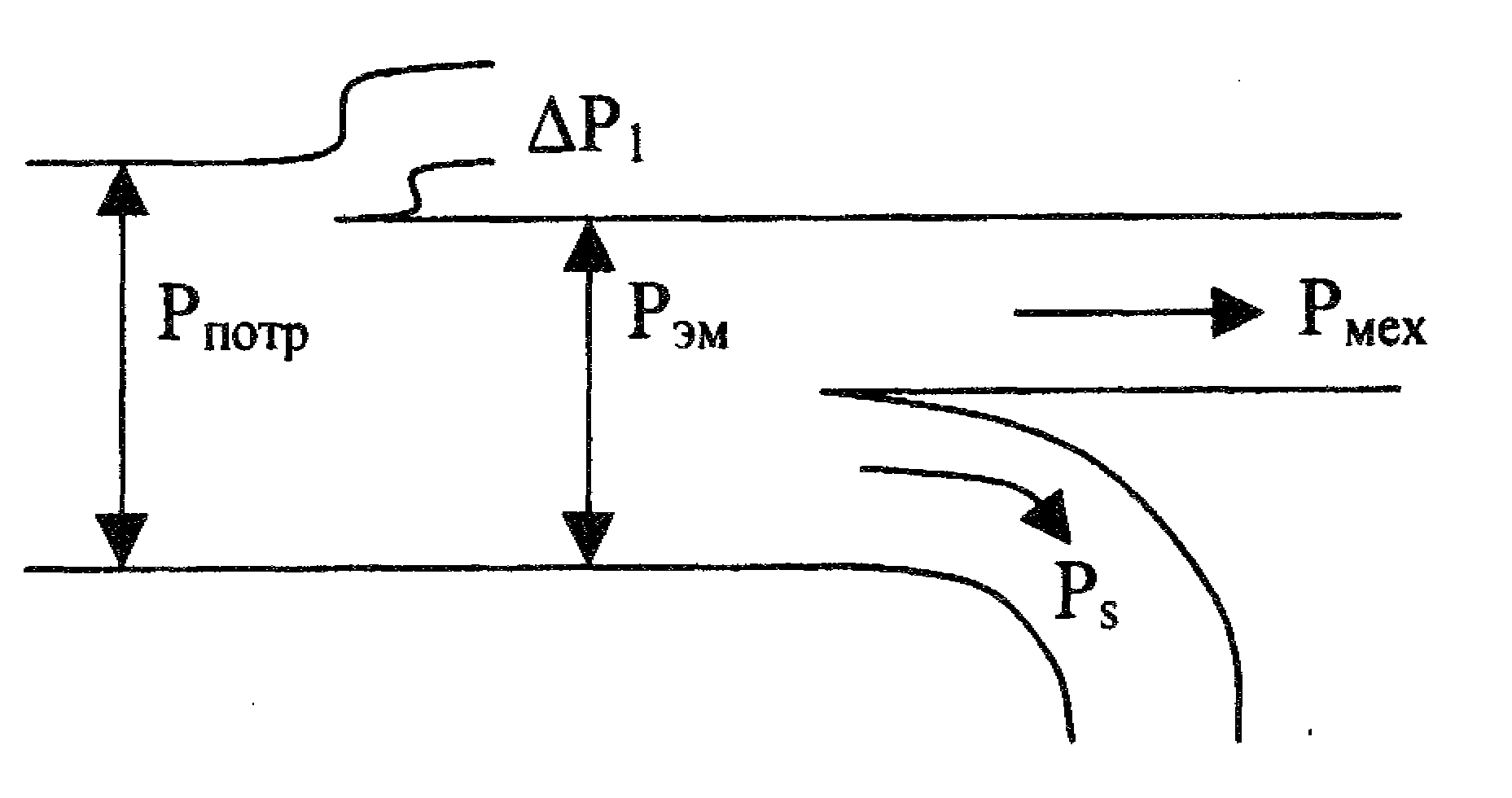
представлена энергетическая диаграмма
асинхронного двигателя.
На рис.4.11
представлена энергетическая диаграмма
асинхронного двигателя.
М
Рис.4.11.
Энергетическая диаграмма асинхронного
двигателя![]() преобразуется в мощность вращающегося
магнитного поля – в электромагнитную
мощностьРэм.
Поскольку асинхронный двигатель работает
одновременно как двигатель и как
трансформатор, то электромагнитная
мощность разделяется на два канала.
Одна часть электромагнитной мощности
преобразуется в механическую мощность
Рмех,
создаваемую на валу асинхронного
двигателя. Эта мощность возникает как
результат взаимодействия вращающегося
электромагнитного поля с активной
составляющей тока ротора. Другая часть
электромагнитной мощности трансформируется
в виде электрической мощности в обмотку
ротора, как по вторичную обмотку
трансформатора.
преобразуется в мощность вращающегося
магнитного поля – в электромагнитную
мощностьРэм.
Поскольку асинхронный двигатель работает
одновременно как двигатель и как
трансформатор, то электромагнитная
мощность разделяется на два канала.
Одна часть электромагнитной мощности
преобразуется в механическую мощность
Рмех,
создаваемую на валу асинхронного
двигателя. Эта мощность возникает как
результат взаимодействия вращающегося
электромагнитного поля с активной
составляющей тока ротора. Другая часть
электромагнитной мощности трансформируется
в виде электрической мощности в обмотку
ротора, как по вторичную обмотку
трансформатора.
Составим баланс мощностей
![]() .
.
Электромагнитная
мощность равна произведению скорости
вращения поля статора
![]() на момент сил, которым обладает вращающееся
магнитное поле и который развивается
на валу асинхронного двигателя.
на момент сил, которым обладает вращающееся
магнитное поле и который развивается
на валу асинхронного двигателя.
![]() .
(4.34)
.
(4.34)
Электромагнитная мощность разделяется на две составляющие:
![]() (4.35)
(4.35)
механическую мощность
![]() (4.36)
(4.36)
и электрическую мощность PS, трансформируемую в обмотки ротора, которая, как следует из (4.34) и (4.35), будет равна:
![]() .
(4.37)
.
(4.37)
Отсюда следует, что мощность, выделяемая в обмотках ротора РS, пропорциональна моменту на валу двигателя и его скольжению.
Эта мощность выделяется в виде потерь в обмотках ротора двигателя (для фазных двигателей во время пуска – в пусковых сопротивлениях).
При проектировании и использовании асинхронных двигателей стремятся уменьшить мощность скольжения, чтобы уменьшить потери электроэнергии, снизить нагрев двигателя и повысить его кпд. Асинхронные двигатели конструируются таким образом, чтобы номинальное скольжение составляло всего несколько процентов. Для экономичной эксплуатации асинхронных электроприводов важным условием является работа с минимальным скольжением. Это правило должно выдерживаться и для регулируемых асинхронных электроприводов. Исключения составляют каскадные схемы включения асинхронного двигателя с фазным ротором, которые рассмотрены в главе 11.
4.3.2. Изменение напряжения питания асинхронного двигателя
Величина потока асинхронного двигателя пропорциональна напряжению питания U1, величина э.д.с. ротора, а, следовательно, и ток ротора I2 также пропорциональны напряжению статора. Поэтому момент асинхронного двигателя, в том числе критический момент, пропорциональны квадрату напряжения U1 (см.4.21, 4.24). Это обстоятельство определяет недопустимость значительного снижения напряжения питания при пуске и работе асинхронного двигателя. Так, при снижении питающего напряжения на 30% его максимальный момент уменьшится примерно в два раза и при значительном статическом моменте двигатель может «опрокинуться», т.е. остановиться, и оказаться под пусковым током. Этот режим является для двигателя аварийным. Такая же ситуация может сложиться, если напряжение питания снижено при пуске двигателя под нагрузкой. Указанные случаи имеют место в слабых электрических сетях, что обуславливает большую аварийность асинхронных короткозамкнутых двигателей. Во избежание этого должны предусматриваться необходимые защитные средства, предотвращающие длительное нахождение асинхронного двигателя под пусковым током.
В то же время преднамеренное снижение (регулирование) напряжения, подаваемого на статорные обмотки, иногда используется для регулирования скорости асинхронного двигателя и для обеспечения плавности пуска.
Регулирование скорости асинхронного двигателя путем изменения питающего напряжения сопряжено с возможностью перегрева его ротора и может производиться лишь при определенных условиях:
при малом диапазоне снижения скорости относительно номинальной;
при сниженном относительно номинального моменте сопротивления на валу двигателя;
использовании двигателя с повышенным скольжением.
Рассмотрим
механические характеристики асинхронного
короткозамкнутого двигателя с повышенным
скольжением при регулировании напряжения
статора (рис.4.12). При снижении напряжения
U1
критическое скольжение двигателя и
скорость идеального холостого хода
![]() остаются постоянными, а максимальный
моментМк
двигателя уменьшается примерно
пропорционально квадрату снижения
напряжения, соответственно снижается
жесткость рабочей части механической
характеристики двигателя. Регулирование
скорости возможно в диапазоне
остаются постоянными, а максимальный
моментМк
двигателя уменьшается примерно
пропорционально квадрату снижения
напряжения, соответственно снижается
жесткость рабочей части механической
характеристики двигателя. Регулирование
скорости возможно в диапазоне![]() .
.
2
Рис.4.12. Механические характеристики асинхронного двигателя при регулировании напряжения питания
а) при постоянном моменте
б) при вентиляторном моменте нагрузки
Предположим, что
момент сопротивления на валу двигателя
остается постоянным и равным номинальному
![]() .
При снижении напряжения до величиныU12
двигатель
будет работать со скоростью, равной
.
При снижении напряжения до величиныU12
двигатель
будет работать со скоростью, равной
![]() со скольжениемsр.
Как следует из энергетической диаграммы
асинхронного двигателя (4.36), мощность
скольжения РS,
выделяемая в виде потерь в роторе
двигателя будет равна
со скольжениемsр.
Как следует из энергетической диаграммы
асинхронного двигателя (4.36), мощность
скольжения РS,
выделяемая в виде потерь в роторе
двигателя будет равна
![]() и пропорциональна заштрихованной
площади прямоугольникаОавsр.
Электромагнитная мощность
и пропорциональна заштрихованной
площади прямоугольникаОавsр.
Электромагнитная мощность
![]() пропорциональна площадиОаг1,
полезная мощность на валу двигателя
пропорциональна площадиОаг1,
полезная мощность на валу двигателя
![]() будет пропорциональна площадиsрв,г1.
будет пропорциональна площадиsрв,г1.
Номинальная мощность скольжения, на рассеяние которой рассчитана конструкция двигателя, пропорциональна площади Оабsн. Сравним эту площадь с заштрихованной (Оавsр), которая отражает потери в роторе двигателя при работе в точке «в». Она в примерно в3 раза превосходит номинальные потери в роторе. Естественно, что при длительной работе в указанном режиме ротор двигателя будет перегреваться и двигатель выйдет из строя. Для того, чтобы можно было применить данный способ регулирования нужно установленную мощность двигателя завысить в 3 раза или применить специальную конструкцию интенсивного теплоотвода.
Поэтому регулирование скорости изменением напряжения питания возможно в том случае, если момент сопротивления МС при снижении скорости существенно меньше номинального. Такой способ регулирования применяется иногда для привода насосов и вентиляторов, у которых момент сопротивления на валу резко снижается при уменьшении скорости. Этот случай рассмотрен на рис.4.12б. Поскольку со снижением скорости МС уменьшается примерно в квадрате от величины снижения скорости, то мощность скольжения РS со снижением скорости существенно снижается. Если нагрузка на валу двигателя носит вентиляторный характер, то максимальная величина мощности скольжения составляет 15% от мощности на валу при номинальной скорости. Поэтому для привода вентиляторов и насосов достаточно увеличение установленной мощности двигателя с повышенным скольжением в 1,5-2 раза.
Снижение напряжения на статоре асинхронного двигателя иногда используется для уменьшения пусковых токов двигателя. Это возможно, если момент сопротивления на валу двигателя при пуске не превышает 0,3-0,4Мн (насосы, вентиляторы или другие рабочие машины, пуск которых производится вхолостую). В этом случае посредством тиристорного регулятора напряжения напряжение, подводимое к обмотке статора, снижается, а затем по мере разгона двигателя увеличивается до номинального значения. Этим обеспечивается «плавный пуск» двигателя с уменьшенными пусковыми токами и сниженными динамическими нагрузками на рабочую машину.