

4.4.Электромеханические характеристики многоскоростных асинхронных двигателей
Поскольку скорость вращения электромагнитного поля статора, как это следует из (4.3), зависит от числа пар полюсов двигателя рП, то имеются специальные модификации асинхронных короткозамкнутых двигателей, позволяющие изменять число пар полюсов машины и тем самым получать две или более (3 и 4) рабочие скорости двигателя. Конструктивно изменение числа пар полюсов может быть достигнуто двумя способами. При первом в пазы статора укладываются две или три независимые обмотки с различными значениями рП. При этом значительно увеличиваются габариты двигателей, но возможно получение любого соотношения числа пар полюсов.
П

 ри
другом способе используется для получения
различного числа пар полюсов одна и та
же обмотка, а изменениерП
достигается переключением секций этой
обмотки. Наибольшее распространение
получили две схемы обмоток: звезда (Y)
– двойная звезда (Y-Y)
и треугольник (∆) – двойная звезда.
ри
другом способе используется для получения
различного числа пар полюсов одна и та
же обмотка, а изменениерП
достигается переключением секций этой
обмотки. Наибольшее распространение
получили две схемы обмоток: звезда (Y)
– двойная звезда (Y-Y)
и треугольник (∆) – двойная звезда.
Рассмотрим схему звезда – двойная звезда (см.рис.4.20). В этой схеме каждая из фазных обмоток состоит из двух секций, которые могут включаться параллельно или последовательно. При параллельном соединении напряжение подводится к средним точкам обмоток, а начала обмоток замыкаются между собой. Образуются две параллельно включенные системы обмоток, соединенные в двойную звезду (Y-Y). Такое соединение соответствует меньшему числу пар полюсов рП. Этой схеме соединения отвечает механическая характеристика с индексом Y-Y на рис.4.20б.

Рис.4.20. Схема (а) и механические характеристики (б) двухскоростного асинхронного двигателя со схемой соединения обмоток
При последовательном соединении секций обмоток число пар полюсов увеличивается вдвое, поэтому номинальная скорость двигателя в этом случае будет вдвое меньше. Так, например, если схеме соединения Y-Y соответствует число пар полюсов рП=2, то номинальная скорость вращения будет 1470об/мин (n0=1500об/мин). Переключив обмотки для соединения в звезду (Y), получим рП=4 и номинальную скорость вращения 735об/мин (n0=750об/мин).
Поскольку длительно допустимый ток в обмотках должен остаться неизменным, то номинальная мощность на валу двигателя будет:
при схеме Y-Y
![]() ,
,
п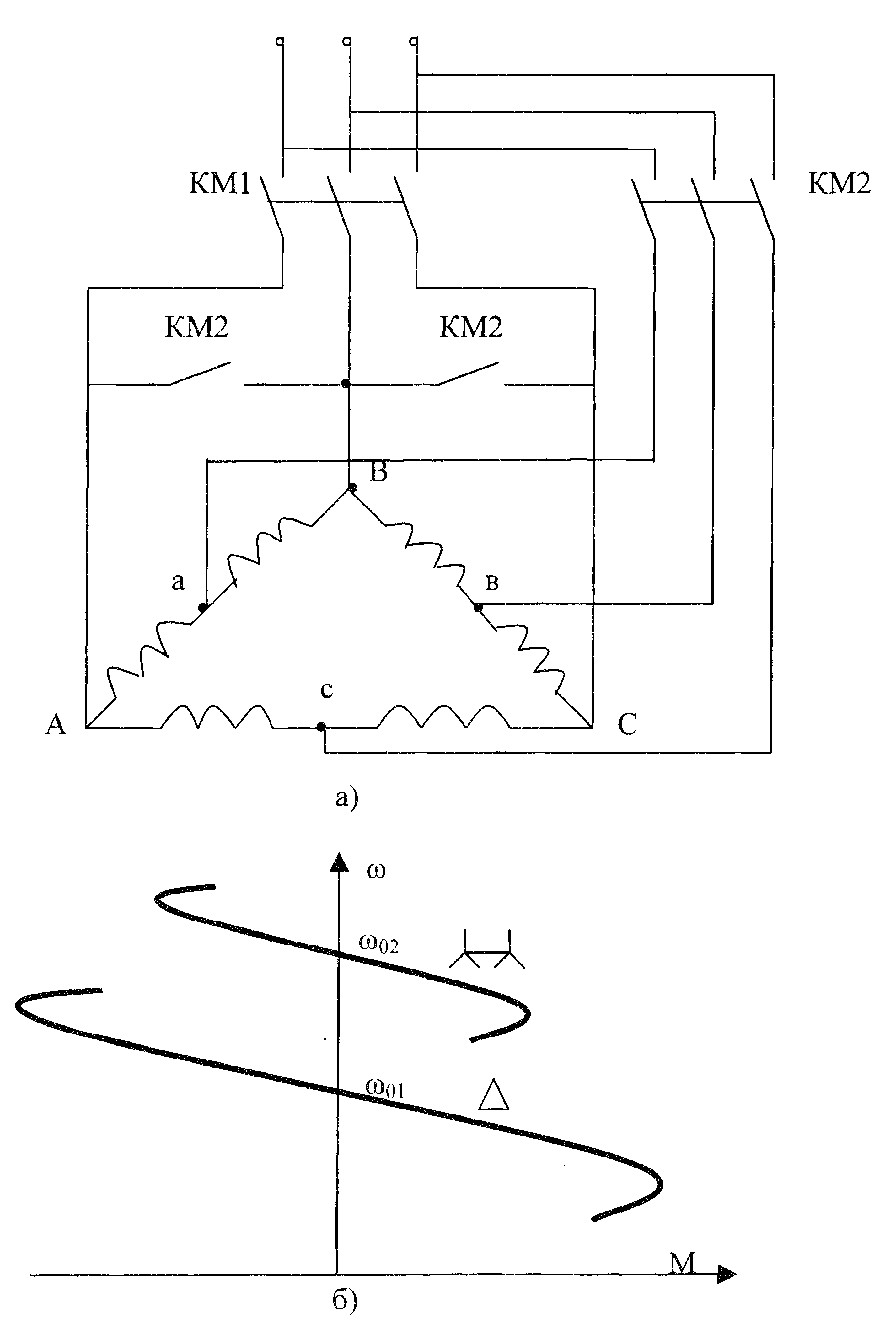 ри
схемеY
ри
схемеY
![]() ,
,
Т.е. мощность
двигателя при высокой скорости будет
примерно в 2 раза выше, чем при низкой
скорости. Однако длитель-но допустимый
номиналь-ный момент сохраняется
постоянным, т.к.
![]() .
.
Рассмотрим схему тре-угольник - двойная звезда (рис.4.21). В этой схеме соединение «двойная звез-да» соответствует высокой скорости.
П
Рис.4.21.
Схема (а) и механические характеристики
двухскоростного двигателя
Мощность двигателя при этом будет:
![]() ,
,
здесь U1 – фазное напряжение питания.
Длительно допустимый
момент при соединении обмоток в Δ будет
в
![]() раз больше, чем при соединении в двойную
звезду. Таким образом, при обеих схемах
соединения двигатель примерно сохраняет
свою мощность.
раз больше, чем при соединении в двойную
звезду. Таким образом, при обеих схемах
соединения двигатель примерно сохраняет
свою мощность.
Двух и многоскоростные двигатели применяются в тех случаях, когда по условиям технологии необходимо иметь две или более фиксированные скорости вращения приводного электродвигателя.