

4.9. Синхронный двигатель, как динамический объект
Зависимость момента синхронного двигателя от пространственного угла θ между осями вращающегося магнитного поля и ротора линеаризованно (см.4.42) может быть представлена как
М=в θ. (4.51)
Такое соотношение говорит о том, что по своим динамическим свойствам синхронный двигатель подобен пружине – чем больше угол закручивания, тем больше момент. Это обстоятельство объясняет склонность синхронной машины к колебаниям около установившегося значения θуст, определяемого моментом нагрузки на валу двигателя. Для демпфирования колебаний используется пусковая (асинхронная) короткозамкнутая обмотка, расположенная на роторе двигателя. Демпфирующий момент, развиваемый благодаря наличию этой обмотки будет согласно (4.47)
![]() ,
(4.52)
,
(4.52)
где β – жесткость рабочей части механической характеристики двигателя в асинхронном режиме.
Выражение (4.52) говорит о том, что как только скорость ротора синхронного двигателя отклоняется по величине от скорости поля ω0, возникает момент Мдемп, стремящийся восстановить равенство скоростей ротора и поля. Если учесть, что угол θ есть интеграл разности скоростей
![]() ,
(4.53)
,
(4.53)
то можно составить структурную схему, отражающую динамические свойства синхронного двигателя при приложении нагрузки (рис.4.32а). В этой схеме моменты, отражающие взаимодействие вращающегося электромагнитного поля с током (потоком) в обмотках ротора, суммируются. Структурная схема (4.32а) отражает следующие уравнения в операторной форме:
 (4.54)
(4.54)
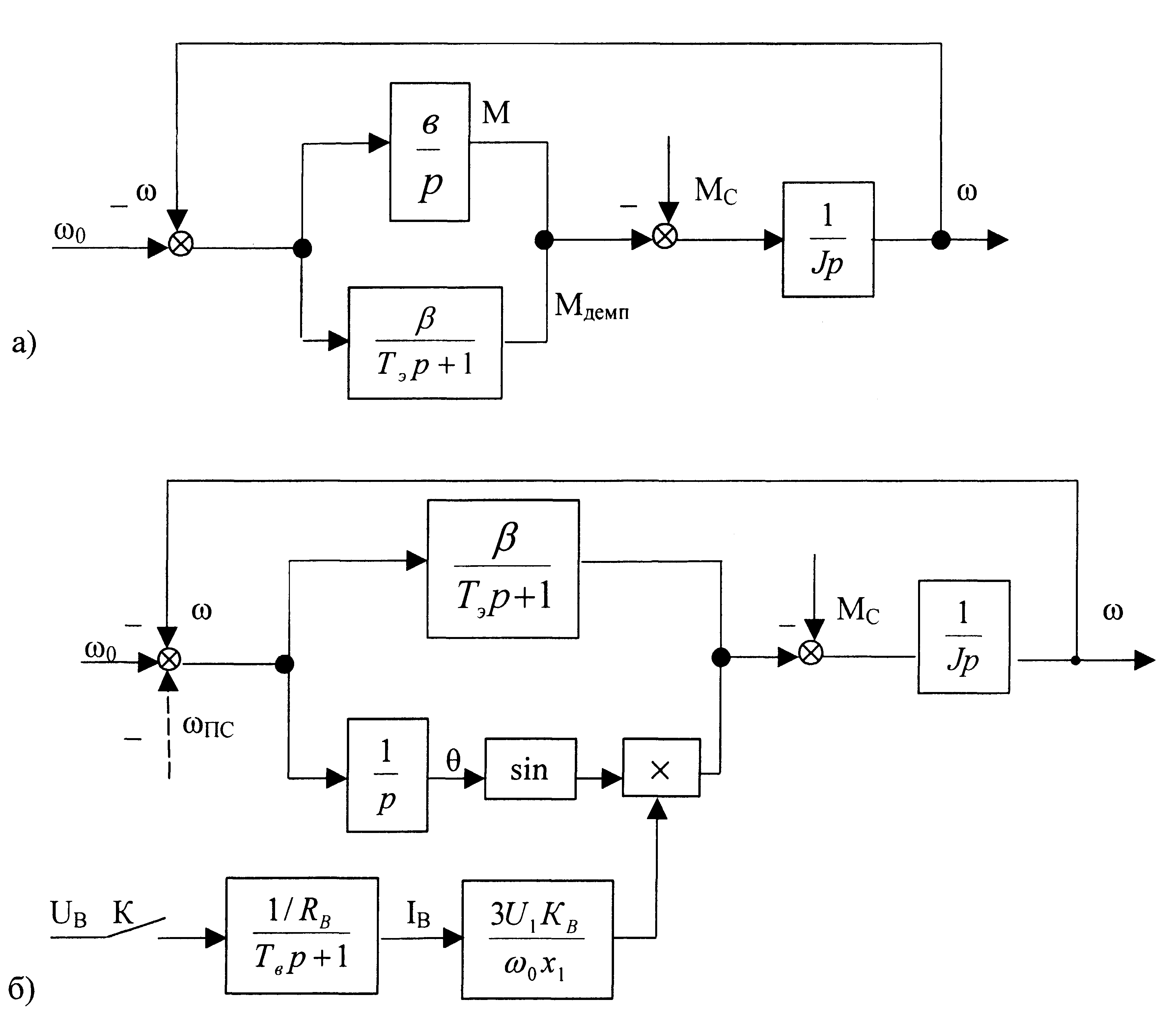
Рис.4.32. Упрощенные структурные схемы синхронного двигателя
а) при приложении нагрузки; б) при втягивании в синхронизм
Свертывая структурную схему (рис.4.32а), получим передаточную функцию синхронного двигателя при изменении нагрузки на его валу
 .
(4.55)
.
(4.55)
Интегрируя (4.55) получим передаточную функцию для угла нагрузки
 .
(4.56)
.
(4.56)
Н
Рис.4.33.
Колебания ротора синхронного двигателя
при скачкообразном приложении нагрузки аиболее
тяжелым режимом для синхронного двигателя
является втягивание в синхронизм. Анализ
этого режима может быть проведен с
ис-пользованием структурной схемы рис.
4.32б. Двигатель раз-гоняется в асинхрон-ном
режиме до подсинхронной ско-ростиωПС.
Контакт К
на структурной схеме разомкнут, что
соот-ветствует работе двигателя на
механической характеристике асинхронного
режима (точка а
на рис.4.24). При замыкании К
начинается режим втягивания в синхронизм.
Ток возбуждения постепенно возрастает,
появляется синхронный момент М,
величина которого вычисляется по формуле
(4.42) с учетом того, что
аиболее
тяжелым режимом для синхронного двигателя
является втягивание в синхронизм. Анализ
этого режима может быть проведен с
ис-пользованием структурной схемы рис.
4.32б. Двигатель раз-гоняется в асинхрон-ном
режиме до подсинхронной ско-ростиωПС.
Контакт К
на структурной схеме разомкнут, что
соот-ветствует работе двигателя на
механической характеристике асинхронного
режима (точка а
на рис.4.24). При замыкании К
начинается режим втягивания в синхронизм.
Ток возбуждения постепенно возрастает,
появляется синхронный момент М,
величина которого вычисляется по формуле
(4.42) с учетом того, что
![]() .
Процесс втягивания в синхронизм носит
сложный колебательный характер (рис.4.33)
и в значительной степени зависит от
двух параметров: величины подсинхронной
скоростиωПС
и значения момента инерции на валу
двигателя. Проверку условия вхождения
в синхронизм можно производить, пользуясь
формулой Р.А.Лютера
.
Процесс втягивания в синхронизм носит
сложный колебательный характер (рис.4.33)
и в значительной степени зависит от
двух параметров: величины подсинхронной
скоростиωПС
и значения момента инерции на валу
двигателя. Проверку условия вхождения
в синхронизм можно производить, пользуясь
формулой Р.А.Лютера
 .
.
Глава 5. Общие принципы регулирования электропривода
5.1. Общие положения
Регулируемый электропривод является сегодня основным видом автоматизированного электропривода. Применение регулируемого электропривода в составе технологических машин и агрегатов обычно связано с одним из следующих обстоятельств: