

Глава 3
ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ И ВЫСОТЫ ПОЛЕТА
3.1. Общие определения
Современный самолет оборудован множеством технических устройств для определения его местоположения, для управления воздушным движением, для решения светотехнических задач, а также для контроля работы силовой установки. В [4] даются общие определения оборудования по назначению.
Комплекс – совокупность информационных систем, вычислительно-программирующих средств, систем индикации, сигнализации и управления, предназначенных для совместного выполнения группы задач общего функционального назначения. Примером комплекса может быть информационный комплекс высотно-скоростных параметров (ИКВСП) для самолета Як-42.
Система – совокупность взаимосвязанных изделий авиационной техники, предназначенных для выполнения заданных функций. Характерным примером системы может быть система воздушных сигналов – СВС.
Прибор – устройство, имеющее самостоятельное эксплуатационное значение и обеспечивающее измерение и индикацию одного или нескольких параметров. Характерными примерами являются указатель скорости УС-2, измеряющий и индицирующий (указывающий) значение приборной скорости; указатель угла атаки и перегрузки УАП-5. Показания прибора воспринимаются человеком с помощью органов чувств.
Индикатор – средство отображения информации о количественном или качественном значении информации. Примером количественного индикатора может быть циферблат со шкалой и стрелкой как у прибора УС-2. Примером качественного индикатора может быть индикатор, отображающий информацию по принципу "не более заданного", "не меньше заданного", "находится в пределах заданного". Такая индикация применяется в системе безопасности СПКР. Силуэт самолета на фоне неподвижной шкалы тоже является качественной индикацией.
Сигнализатор – прибор, обеспечивающий отображение о соответствии или несоответствии параметра, системы или объекта требуемому значению или состоянию в виде визуальных, звуковых и тактильных сигналов. Примерами могут быть светосигнализаторы ТС-3, ТС-5, содержащие в своих табло определенные надписи.
Датчик – измерительное устройство для выработки сигнала о текущем значении измеряемого параметра. В отличие от прибора сигналы датчика воздействуют на звенья системы, минуя человека.
Основное оборудование – обязательное оборудование, необходимое для обеспечения основных заданных функций в ожидаемых условиях эксплуатации.
Резервное оборудование – обязательное оборудование, необходимое для обеспечения нормального выполнения ограниченного количества функций с приемлемыми точностными характеристиками при отказе отдельных видов основного оборудования или невозможности его использования. К такому оборудованию на борту гражданского самолета относятся механический указатель скорости УС-2, магнитный компас КИ-13, механический высотомер, механический вариометр. Они применяются на тот случай, когда отказывает по каким-либо причинам экранная основная индикация в системе СЭИ.
Все оборудование самолета по назначению можно классифицировать на следующие группы согласно [4]: пилотажно-навигационное оборудование (ПНО); средства контроля работы силовой установки; радиотехническое оборудование навигации, посадки и УВД; светотехническое оборудование, радиосвязное оборудование, электротехническое оборудование, оборудование внутрикабинной сигнализации.
Пилотажно-навигационное оборудование – это совокупность измерительных, вычислительных и управляющих систем и устройств и систем отображения информации на борту самолета, предназначенных для решения задач пилотирования, навигации и самолетовождения в целом от взлета до посадки и выдачи информации потребителям. К физическим параметрам ПНО относятся: географическая широта; географическая долгота; высота полета; скорость полета; вертикальная скорость; угол курса; угол тангажа; угол крена; угловые скорости вращения самолета вокруг осей x,y,z; линейные ускорения вдоль осейx,y,z.
Для индикации основной информации ПНО на современных самолетах типа Ту-204 устанавливаются комплексные пилотажные индикаторы КПИ для первого и второго пилотов. Количество образцов каждого типа оборудования, каждого типа самолета должно быть минимальным, но достаточным для надежного полета в ожидаемых условиях [4]. Технические требования, нормы и методы испытаний ПНО изложены для гражданских самолетов и вертолетов в приложениях восемь к НЛГС и НЛГВ [5, 7]. Из состава ПНО подробнее рассмотрим измерители скорости полета.
Классификация скоростей полета
Согласно нормам НЛГС и сложившейся практике при пилотировании и навигации самолетов различают следующие скорости полета: истинную воздушную, путевую, вертикальную, относительную истинную воздушную скорость (число М), приборную скорость, индикаторную земную скорость, индикаторную скорость [4, 13, 14].
Истинная воздушная vист– это скорость движения самолета относительно воздушной среды.
Путевая скорость w– это горизонтальная составляющая скорости движения самолета относительно Земли (рис. 3.1).
|
|
Рис. 3.1. Навигационный треугольник скоростей: vг– горизонтальная составляющаяvист ;vв– скорость ветра (горизонтальная составляющая);w– путевая скорость;γ– истинный курс;ψ– угол сноса;β– путевой угол; δ– направление ветра;ε– угол ветра |
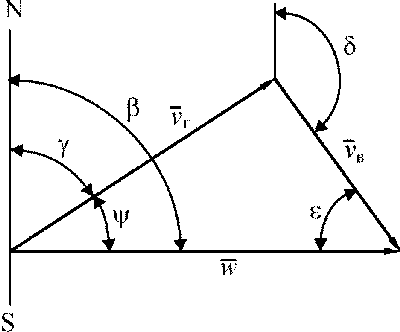
Из навигационного треугольника видно, что путевая скорость равна геометрической сумме горизонтальных составляющих vисти скорости ветраvв:
![]() . (3.1)
. (3.1)
Вертикальная скорость vН– это вертикальная составляющая скорости движения самолета относительно Земли или скорость изменения истинной высоты
![]() . (3.2)
. (3.2)
Относительная истинная воздушная скорость – это скорость истинная, отнесенная к скорости звука при данной температуре. Ее называют числом М(число Маха):
![]() . (3.3)
. (3.3)
Приборная скорость – скорость, которую показывает указатель скорости, проградуированный по разности между полным и статическим давлениями воздуха
![]() , (3.4)
, (3.4)
где Pпберется с учетом сжимаемости воздуха.
Индикаторная земная скорость – приборная скорость, исправленная на инструментальную погрешность и аэродинамическую поправку:
![]() . (3.5)
. (3.5)
Индикаторная скорость – индикаторная земная скорость, исправленная на поправку на сжимаемость, связанную с отличием давления воздуха от стандартного давления на уровне моря:
![]() . (3.6)
. (3.6)
Истинная воздушная скорость связана с индикаторной скоростью следующим соотношением:
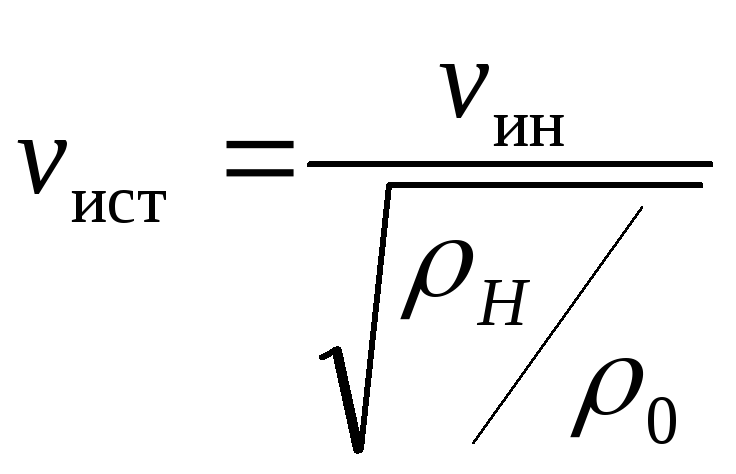 , (3.7)
, (3.7)
где ρН– плотность воздуха на высоте полетаН;ρ0– плотность воздуха стандартная на уровне моря.
Часто, в технической литературе, не делается различие между приборной и индикаторной скоростями. При теоретических расчетах имеют в виду индикаторную скорость. Приборная (индикаторная) скорость является сугубо пилотажным параметром. Особенно ответственно и часто используется этот параметр на таких режимах движения самолета как разбег, взлет и посадка. На каждом этапе движения самолета нормами НЛГС и ИКАО присваиваются характерные значения приборной скорости, которые должны быть выдержаны из условия обеспечения безопасности. В связи с этим существует стандартная номенклатура скоростей [4]:
- минимальная эволютивная скорость разбега vmin ЭР(vMCG) есть скорость, на которой при внезапном отказе критического двигателя должна обеспечиваться возможность управления самолетом с помощью аэродинамических органов управления для поддержания прямолинейного движения самолета (в скобках приведены обозначения, принятые в ИКАО);
- минимальная эволютивная скорость взлета vmin ЭВ(vMCA) есть скорость, на которой при внезапном отказе критического двигателя должна обеспечиваться возможность управления самолетом с помощью аэродинамических органов управления для поддержания прямолинейного движения самолета;
- минимальная скорость отрыва vmin ОТР(vMU) устанавливается для всех принятых для взлета конфигураций самолета в диапазоне центровок, установленных регламентом летной эксплуатации (РЛЭ). При этом угол атаки не должен превышать допустимое значение αдоп;
- vОТК(vEF) – скорость в момент отказа двигателя;
- скорость принятия решения v1– это скорость разбега самолета, на которой возможно как безопасное прекращение, так и безопасное продолжение взлета. Величина этой скорости устанавливается в РЛЭ и должна удовлетворять следующим условиям:v1≥vminЭР;v1≤vп.ст;
- скорость в момент подъема передней стойки шасси vп.ст– скорость начала отклонения штурвала в направлении "на себя" для увеличения угла тангажа на разбеге;
- безопасная скорость взлета v2должна быть не менее чем: 1,2vС1при взлетной конфигурации; 1,1vminЭВ; 1,08vαдоптоже при взлетной конфигурации;
- скорость отрыва vОТР(vLOF) – скорость самолета в момент отрыва основных его стоек шасси от поверхности ВПП по окончании разбега при взлете;
- скорость в момент начала уборки механизации на взлете v3;
- скорость при полетной конфигурации на взлете v4. Она должна быть не менее чем 1,3vС1и 1,2vminЭВ;
- минимальная эволютивная скорость захода на посадку vminЭП (vMCL) – скорость, на которой при внезапном отказе критического двигателя должна обеспечиваться возможность управления самолетом с помощью только аэродинамических органов управления;
- максимальная скорость захода на посадку vЗП max;
- скорость захода на посадку vЗП max (vREF);
- vC (vS) – скорость сваливания, минимальная скорость самолета при торможении до угла атаки αпред;
- vС1(vS1) – скорость сваливания самолета при работе двигателей в режиме малого газа;
- vαдоп(vСy доп) скорость при допустимом угле атаки приny= 1;
- vmaxЭ– максимальная эксплуатационная скорость. Эту скорость пилот в нормальной эксплуатации не должен преднамеренно превышать при всех режимах полета;
- vmax max– расчетная предельная скорость. Она устанавливается исходя из возможности непреднамеренного ее превышения.vmax max-vmax≥ 50 км/ч. При превышении этой скорости не исключается катастрофическая особая ситуация.
3.2. Прибор для измерения индикаторной (приборной) скорости
Указатель приборной скорости применяется в качестве пилотажного прибора для измерения аэродинамических сил, действующих на самолет в полете. Известно (2.18), что аэродинамическая подъемная сила определяется формулой
![]() .
.
При увеличении угла атаки αподъемная сила увеличивается вплоть до его предельного значения. Чем больше угол атаки, тем меньше необходима скорость для удержания самолета в воздухе. Как следует из параграфа 3.1 каждому режиму полета соответствует определенное минимальное значение скорости, при котором самолет еще может держаться в воздухе. Например, условием горизонтального полета является равенство веса самолета и подъемной силы
![]()
![]() ,
,
где G– вес самолета. Отсюда находим скорость горизонтального полета
![]() .
.
Указатель приборной скорости является одним из важнейших пилотажных приборов, он дает летчику возможность предотвратить падение самолета на малых скоростях и разрушение его на больших скоростях из-за чрезмерно больших аэродинамических сил. По физическому смыслу указатель приборной скорости измеряет не скорость, а разность между полным и статическим давлениями (3.4), или скоростной напор встречного воздуха, который зависит и от скорости, и от плотности воздуха. Поскольку летчику привычнее и легче запомнить характерные значения скорости, а не давления скоростного напора, то указатель тарируется в единицах скорости.
По определению (3.4) индикаторная (приборная) скорость основана на манометрическом методе, то есть на измерении разности между полным и статическим давлением [13 ‑ 14].
|
|
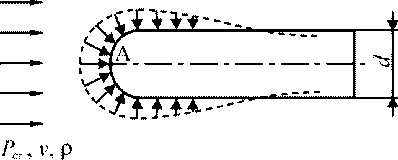
Рис. 3.2. Цилиндрическое тело в потоке воздуха |
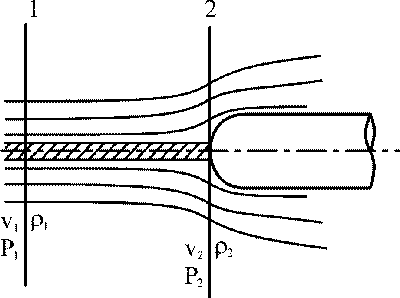
Зависимость между скоростью, полным и статическим давлениями определяется с помощью уравнения Бернулли, применяемого к воздушному потоку, воспринимаемому приемником воздушного давления (рис. 3.2). В критической точке 2 скорость воздуха падает до нуля. Напишем это уравнение, не углубляясь в вывод его [14], для случая несжимаемого воздуха:
![]() , (3.8)
, (3.8)
где v1иv2– скорость потока в сечениях 1 и 2 в м/с;P1иP2– давления воздуха в сечениях 1 и 2 в кг/м2;ρ1иρ2– плотность воздуха в сечениях 1 и 2 в кг с2/м4.
Так как сечение 1 взято в невозмущенной среде, то скорость v1равна истинной воздушной скоростиvист, давлениеP1равно статическому давлениюPст. ДавлениеP2в точке полного торможения равно полному давлениюPп, так как в этой точке скоростьv2равна нулю. Учитывая, что для несжимаемой средыρ1=ρ2=ρ, после соответствующей замены в уравнении (3.8), получим
![]() (3.9)
(3.9)
или ![]() кг/м2. (3.10)
кг/м2. (3.10)
С учетом сжимаемости потока воздуха уравнение (3.10) принимает вид:
![]()
или окончательно ![]() ,
(3.11)
,
(3.11)
где
![]() ;qсж– скоростной
напор с учетом сжимаемости воздуха.
;qсж– скоростной
напор с учетом сжимаемости воздуха.
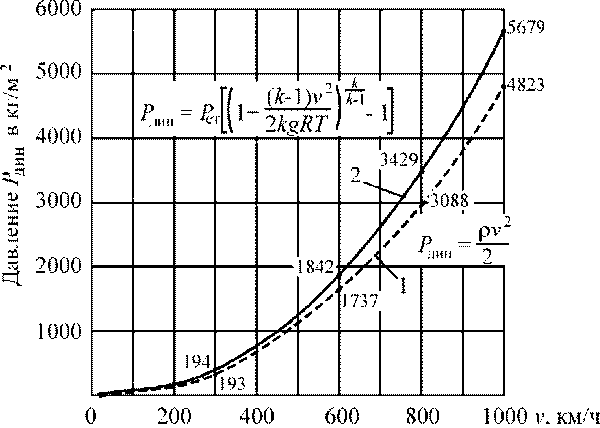
Рис. 3.3. Зависимость давления Pдинот скорости потока:
1 – без учета сжимаемости воздуха; 2 – с учетом сжимаемости воздуха
Из рисунка 3.3 видно, что учет сжимаемости потока приводит к дополнительному увеличению динамического давления (линия 2). При этом зависимость динамического давления от параметров воздушного потока имеет вид:
 , (3.12)
, (3.12)
где k– отношение теплоемкостей;g– ускорение силы тяжести;R– газовая постоянная, равная 29,27 м/град;Т– температура невозмущенной атмосферы воК. По формуле (3.12) тарируются указатели индикаторной и истинной воздушной скорости.
Для тарировки указателя индикаторной скорости принимаются значения, соответствующие нормальным условиям на уровне моря: Рст = Ро ст = 760 мм рт. ст. (10332,276 кг/м2),Т=То= 288оК (t= +15оС),R = 29,27 м/град, массовая плотностьρо= 0,124966 кг с2/м4,k= 1,405. После этого оказывается, что индикаторная скорость по формулам (3.11) и (3.12) зависит только от динамического давленияРдин. Для практического пользования существуют стандартные таблицы, по которым для каждой скорости можно определить значение динамического давления [33].
Следует особое внимание обратить на тот факт, что показания указателя приборной скорости не зависят от статического давления, а значит и от высоты полета самолета. Говорят в связи с этим, что указатель (а также датчик и сигнализатор) приборной (приборной) скорости не имеет методической погрешности от изменения высоты полета. Это ценное качество прибора, обеспечивающего безопасность полета независимо от высоты. Важно, чтобы всегда было необходимое значение скоростного напора на любой высоте.
На рис. 3.4 представлена принципиальная схема указателя приборной скорости с раздельными приемниками давлений РпиРст. Полное давлениеРп =Рд+Рстпоступает в герметичную полость манометрической коробки 5 от приемника 7 через пневмопровод 6. В герметичную полость корпуса 3 от приемника 1 через пневмопровод 2 поступает давлениеРст . Под действием разности давленийРп-Рст=Рд+Рст-Рст=Рдмембрана манометрической коробки прогибается и поворачивает стрелку относительно индикатора – шкалы 4.

Рис. 3.4. Принципиальная схема указателя приборной скорости: 1 – приемник статического давления Рст; 2 – пневмопровод статического давления; 3 – корпус; 4 – индикатор; 5 – манометрическая коробка; 6 – пневмопровод полного давления; 7 – приемник полного давленияРп

Рис. 3.5. Структурная схема указателя приборной скорости: 1 – приемник давлений РпиРст; 2 – пневмопроводРп; 3 – пневмопроводРст; 4 – отстойники-фильтры каналаРп; 5 – отстойники-фильтры каналаРст; 6 – полость коробки; 7 – полость корпуса; 8 – условное звено образования динамического давленияРд; 9 – решающее устройство; 10 – индикатор
На рисунке 3.5 представлена структурная схема указателя приборной скорости, составленная по его принципиальной схеме (рис. 3.4). Рассмотрим подробнее роль каждого звена в работе указателя индикаторной скорости.
Приемник полного давления
|
|
|
|
Рис. 3.6. Характер обтекания цилиндра потоком воздуха |
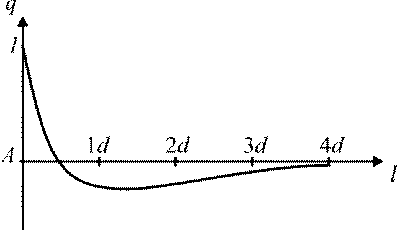
Рис. 3.7. Распределение скоростного напора по длине ППД |
Для работы указателя индикаторной скорости по принципу его действия необходимо воспринять в полете полное и статическое давления. В практике авиаприборостроения имеют место применение отдельных приемников полного и статического давлений (рис. 3.4). Давления необходимо воспринимать точно, так как динамическое давление зависит от скорости в квадрате.
Приемник полного давления (ППД) предназначен для восприятия только полного давления встречного потока воздуха. Под понятием "полное давление" подразумевается давление, приходящееся на единицу поверхности тела, плоскость которого перпендикулярна направлению набегающего потока. Для ППД применяется цилиндрическое тело, в центре которого делается сквозное отверстие.
Из рисунков 3.6 и 3.7 видно, что полное торможение набегающего потока воздуха будет только в точке А. Если в цилиндре в районе точкиАсделать отверстие, то вдоль ее полости установится давление, равное полномуРп=Рст+Рд. Как всякий инструмент, ППД обладает погрешностью восприятияРп, связанной с несовершенством его конструкции.
Из самого определения полного давления следует, что лучшим расположением ППД относительно потока воздуха является то, когда плоскость сечения входного отверстия приемника будет перпендикулярна вектору скорости. При этом погрешность приемника будет вызвана только потерями потока в полости канала Рп(рис. 3.8). Это условие установки равносильно тому, когда продольная ось приемника ППД совпадает с направлением воздушного потока.
Но даже в этом случае приемник обладает погрешностью порядка 2 %, которая определяется как отношение абсолютной величины погрешности ΔРпк скоростному напору 0,5ρv2.
|
|
Рис. 3.8. Зависимость коэффициента ξприемника ППД от скорости приα=β= 0 |
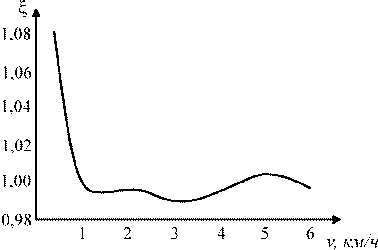
В этих условиях формулу (3.11) можно переписать в виде
![]() , (3.13)
, (3.13)
где ξ– коэффициент приемника приα=β= 0. Если же установка ППД такова, когдаα ≠ 0,β≠ 0, то появляются дополнительные угловые погрешности ΔРп= ± ΔРп f(α) и ΔРп = ΔРп f(β). Следующей причиной появления погрешности ППД является скос потока воздуха в месте установки приемника на борту самолета. Эта погрешность нормируется НЛГС [4] в пределах не более 10 км/ч или 3 % (в зависимости от того, что больше) во всем диапазоне измерения скорости. За счет выбора места установки на борту самолета, за счет конструкторских приемов и тарировки в аэродинамических трубах погрешность ППД можно свести до ± (0,005 – 0,01)q.
Диапазон скоростей от 40 до 1100 км/ч; масса 0,17 кг; погрешность в диапазоне скоростей до 150 км/ч не более ± 0,05qпри углахα=β= ± 25о; погрешность при скоростях свыше 150 км/ч и углахα=β= ± 20оне более ± 0,025q; обогрев постоянным током мощностью до 135 Вт.

Рис. 3.9. Конструкция приемника ППД-4: 1 – наконечник; 2 – дренажное отверстие;
3 – обогревательный элемент; 4 – отверстие; 5 – щека; 6 – основание; 7 – розетка; 8 – вилка; 9 – провод; 10 – штуцер
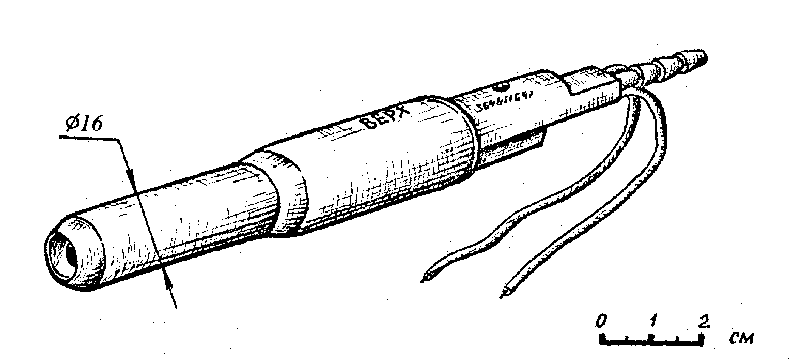
Рис. 3.10. Внешний вид приемника полного давления ППД-9В
Приемник статического давления
Под статическим давлением понимают давление, которое существовало бы в данной точке невозмущенной прибором среды, если бы прибор двигался со скоростью потока. Статическое давление в покоящейся среде называется барометрическим или атмосферным давлением и измеряется барометром. Оно измеряется как абсолютное давление, отсчитываемое от абсолютного нуля давления. Для измерения статического давления Рстнеобходим прибор такой конструкции, которая не искажала бы поток в исследуемой точке. При измерении давленияРстприбор движется относительно воздуха, а это согласно законам аэродинамики приводит к возмущению воздуха. При этом форма прибора – приемникаРстиграет основную роль на точность измерения. Измеренное давление будет представлять собой сумму из давления в невозмущенном прибором потоке и дополнительного давления, вызванного обтеканием прибора, и зависит от его формы. Условия обтекания прибора могут быть таковы, что измеренное давление может быть больше или меньше истинного его значения (рис. 3.11).
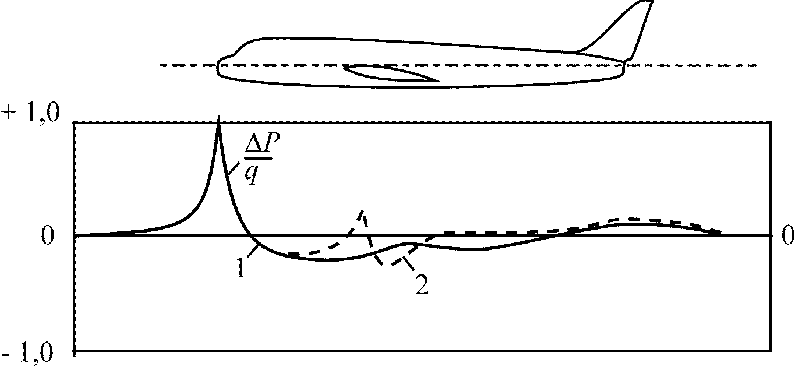
Рис. 3.11. Распределение коэффициента давления для типичного дозвукового распределения по линии фюзеляжа самолета: 1 – только по свободному фюзеляжу; 2 – по фюзеляжу вместе с плоскостями и хвостовым оперением
Наиболее часто для измерения Рстприменяется статический зонд (статический крючок). Он представляет собой пустотелую цилиндрическую трубку диаметромdс обтекаемым закрытым носком.
|
|
Рис. 3.12. Статический зонд: 1 – пустотелый цилиндр; 2– державка цилиндра; 3 – статические отверстия |
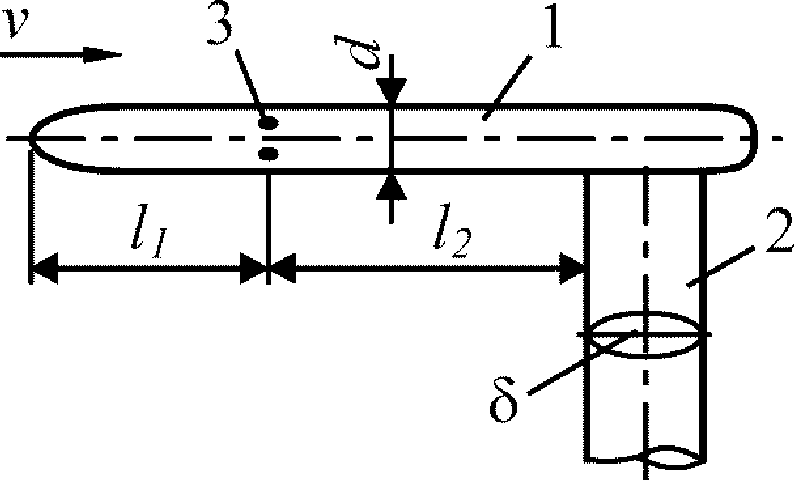
На боковой поверхности трубки имеются отверстия небольшого диаметра. Для повышения точности измерения в приборе увеличивают расстояние l1от приемных отверстий до носка и в другую сторону –l2до держалки. Рекомендуются такие соотношения:l1= 3d,l2= 8δ[14, 34].
В авиации часто роль пустотелой цилиндрической трубки используется сам фюзеляж самолета (на дозвуке), в котором делают приемные отверстия (рис. 3.13).
|
|
Рис. 3.13. Приемное отверстие для измерения статического давления на поверхности обтекаемого тела (фюзеляжа) |

Рекомендуется выдерживать соотношение h/d≥ 3, диаметр отверстия желательно иметь небольшим, примерно 0,2 – 0,5 мм.
|
|
Рис. 3.14. Плиточный приемник статического давления: 1 – плита с отверстиями; 2 – корпус; 3 – компенсатор
|

Для удобства и надежности восприятия Рствместо отверстий в фюзеляже применяется стандартная плита с отверстиями. Вместе с корпусом она образует прибор для восприятия статического давления (рис. 3.14). На фюзеляже выбирают такие места для установки плиточного приемника, где наименьшие отклонения линии 2 на рис. 3.11 от средней линии 0-0. Плита приемника устанавливается на самолете заподлицо с обшивкой.
Рис. 3.15. Внешний вид плиточного приемника статического давления ПДС-В3 диапазон скоростей при восприятии Рстдо 450 км/ч; масса 0,25 кг; обогрев напряжением постоянного тока 27 В при мощности до 60 Вт
Кроме рассмотренных приемников РпиРстширокое применение в авиации нашли комбинированные приемники, которые называются ПВД. В этом приборе совмещены два прибора: приемникиРпиРст(рис. 3.16). Раздельные приемники применяются в основном на дозвуковой скорости полета. На сверхзвуковых скоростях полета обтекание фюзеляжа настолько сложное и непредсказуемое, что невозможно найти места для установки приемников давлений.
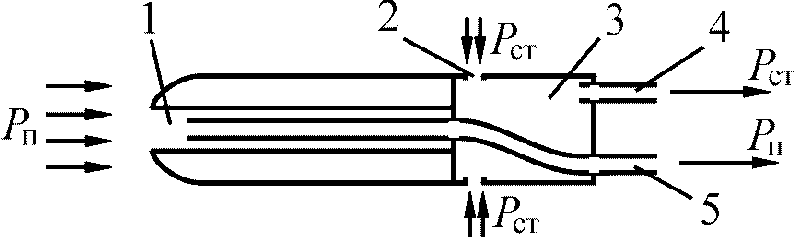
Рис. 3.16. Принципиальная схема приемника типа ПВД: 1 – камера полного давления; 2 – отверстие камеры статического давления; 3 – камера статического давления; 4 – трубопровод статического давления; 5 – трубопровод полного давления
На сверхзвуковых самолетах ПВД выносится с помощью штанги в невозмущенное пространство впереди самолета. Таким же образом устанавливают ПВД и на вертолете.
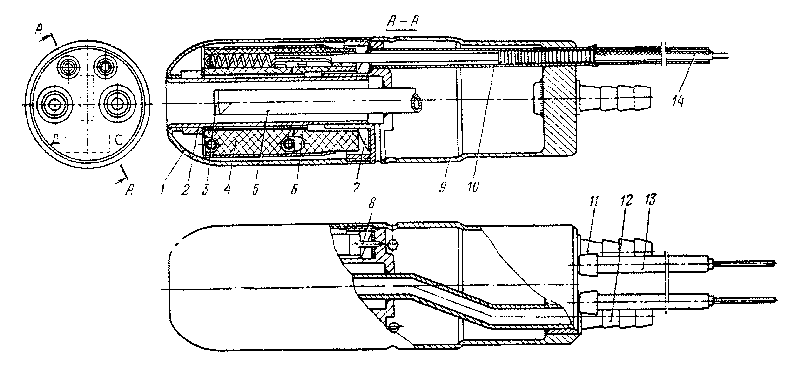
Рис. 3.17. Конструкция приемника ПВД-6М:
1 – наконечник; 2 – втулка; 3 – заслонка; 4 – обогревательный элемент; 5 – трубопровод полного давления; 6 – прокладка; 7 – прокладка; 8 – упор; 9 – корпус; 10 – трубка; 11 – штуцер С; 12 – штуцер Д; 13 – изоляционная втулка; 14 – провод
Все приемники воздушных давлений должны быть рассчитаны на нормальную работу в условиях возможного обледенения. Камеры полного и статического давлений должны быть герметичными в соответствии с нормами НЛГС [4].
Средствами восприятия давлений в полете занимаются многие зарубежные и отечественные фирмы и предприятия. К основным разработчикам и изготовителям этих средств можно отнести: УКБП, Восход (Россия); Роземаунт (RosemauntInc., США); Смит (Smiths, Англия); Бадин-Краузет (Badin-Crouset, Франция) и Дорниер (Dornier, ФРГ).
Основной причиной погрешностей восприятия статического давления является возмущение воздушной среды, вызванное самолетом, которое зависит от многих факторов: от угла атаки, от угла скольжения, от числа М. Компенсация аэродинамических погрешностей может производиться только у приемников, установленных на фюзеляже или на кромке крыла на скоростях полета не выше числаМ= 0,95. На больших скоростях приемники выносятся вперед относительно носовой части самолета. В таблицах 3.1 – 3.4 приведены технические характеристики приемников отечественных и зарубежных изготовителей
Таблица 3.3
Технические характеристики ПВД английского филиала фирмы Rosemount
|
Тип ПВД |
855ВР |
856ВР |
|
Воспринимаемые параметры |
Рп |
Рп ,Рст |
|
Соответствие стандартам |
Bs 20.135 кл. А | |
|
Электропитание обогревательного элемента |
115 В, 250 Вт |
28 В, 250 Вт |
|
Диапазон рабочих температур |
- 60о … + 300 о |
- 65о … + 60 о |
|
Диапазон рабочих высот |
- 300 – + 15000 м | |
Таблица 3.4
Технические характеристики ПВД фирмы Crouzet
|
Тип ПВД |
120 |
36 |
41 – 22, 31 |
460, 461 |
|
Воспринимаемые параметры |
Рст |
Рп |
Рп |
Рп |
|
Электропитание обогревательного элемента |
- |
27 В пост., 80 Вт |
27 В, 80 Вт |
27 В, 120 Вт |
|
Рабочий диапазон α |
Нет данных |
± 15о |
Нет данных |
± 15о |
|
Масса |
37 ± 3 г |
300 ± 5% г |
270 ± 5% г |
325 ± 5% г |
Пневмопроводы
В структурной схеме указателя приборной скорости (рис. 3.5) под звеньями 2 и 3 подразумеваются пневмопроводы (трубопроводы), которые соединяют средства восприятия воздушных параметров (ППД, ПСД, ПВД) с манометрической коробкой (Рп) и полостью корпуса. Пневмопроводы снабжены устройствами, защищающими от скопления влаги (звенья 4 и 5). Пневмопроводы представляют собой металлические или дюритовые трубы. Внутренний диаметр пневмопровода статического канала должен быть не менее 6 мм, а полного канала – не менее 4 мм [4].
В установившемся режиме полета параметры пневмопроводов не сказываются на процесс измерения скорости. Поэтому в формулах (3.11 и 3.12) они не участвуют. При точных исследованиях эти характеристики можно учитывать как потери воздушного потока через значение коэффициента приемников. В динамическом же режиме измерения скорости параметры пневмопроводов должны быть учтены.
Для гражданских транспортных самолетов нормируются коэффициенты запаздывания каналов РпиРст . Так, коэффициент запаздывания на уровне Земли каждой статической системы при подключении всех потребителей (если они подключены в единую систему) должен быть не более 0,4 секунды при питании датчиков САУ и не более 1,0 секунды – при питании пилотажно-навигационных приборов.
В связи со сказанным
о режимах измерения скорости можно
утверждать, что в статическом режиме
давления по каналам проходят к указателю
без искажений:![]() ;
;![]() ;
;![]() .
Динамический режим работы измерителя
скорости полета рассматривается в пятой
главе.
.
Динамический режим работы измерителя
скорости полета рассматривается в пятой
главе.
Решающее устройство указателя индикаторной скорости
Роль решающего устройства указателя приборной согласно структурной схеме рис. 3.5 состоит в формировании необходимой зависимости угла поворота стрелки от скорости. Для этого необходимо иметь:
- аэродинамическую формулу Рдин=f1(v);
- характеристику упругого чувствительного элемента x=f2(Рдин);
- характеристику механизма α=f3(x);
Решение системы трех уравнений дает уравнение шкалы
![]() . (3.14)
. (3.14)
Если предположить, что упругий чувствительный элемент и механизм имеют линейные характеристики, то x=C1Pдин,α=ix, гдеC1 – чувствительность упругого элемента по давлению,i– передаточное отношение механизма (трибка – сектор). В этом случае имеем зависимостьα=iC1Pдин . Подставив сюда значениеPдиниз уравнения (3.13), получим окончательно уравнение шкалы
![]() . (3.15)
. (3.15)
Уравнение шкалы по формуле (3.15) показывает, что она неравномерная. В начале шкалы деления будут мелкими. Для точной посадки и взлета самолета необходима растянутая шкала в начале ее. Это достигается применением чувствительного элемента с нелинейной характеристикой и механизма с переменным передаточным отношением [13].
С точки зрения характера индикации показательными являются приборы УС-1 и УС-2, применяемые в качестве резервных на истребителях и на магистральных транспортных самолетах.
Из рисунков 3.18 и 3.19 видно, что шкалы приборов УС-1 и УС-2 кусочноравномерные. На начальных участках шкалы растянуты. Если на первом участке шкалы УС-1 цена деления равна 10 км/ч, то на втором участке она равна 50 км/ч. У прибора УС-2 цена деления на обоих участках шкалы одинаковая и равна 10 км/ч, но за счет растянутости первого участка отсчет значений малых скоростей в диапазоне от 80 км/ч до 400 км/ч значительно удобнее и надежнее.
|
|
|
|
Рис. 3.18. Индикатор прибора УС-1 |
Рис. 3.19. Индикатор прибора УС-2 |
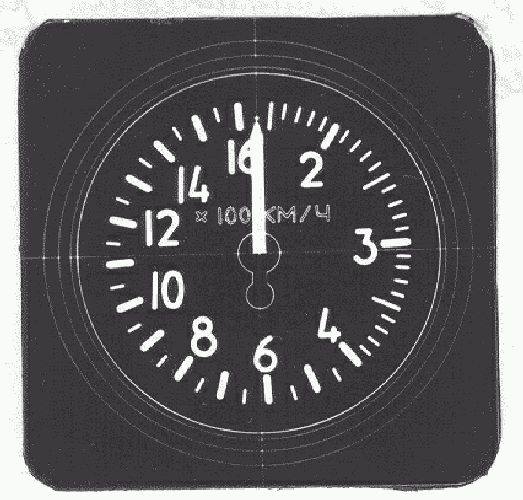
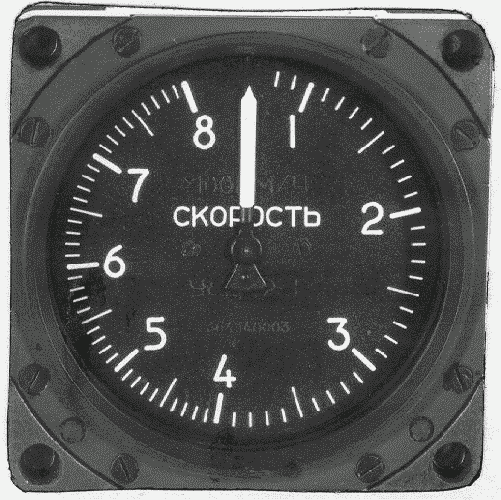
Таблица 3.5
|
v, км/ч |
150 |
200 |
300 |
400 |
600 |
800 |
1000 |
1200 |
1400 |
1600 |
|
Δv, км/ч |
±10 |
±10 |
±10 |
±10 |
±25 |
±25 |
±25 |
±25 |
±25 |
±25 |
Таблица 3.6
|
v, км/ч |
50 |
80 |
100 |
150-200 |
250 |
300 |
350-450 |
500 |
550-600 |
650 |
700 |
750 |
800 |
|
Δv, км/ч |
±10 |
±8 |
±5 |
±3,5 |
±4 |
±5 |
±5,5 |
±6 |
±6,5 |
±7,5 |
±8,5 |
±9,5 |
±10 |
В таблицах 3.5 и 3.6 приведены погрешности приборов УС-1 и УС-2 соответственно при нормальных климатических условиях. Следует отметить, что погрешность УС-2 полностью соответствует требованиям НЛГС-3. Прибор используется в качестве резервного на гражданских транспортных самолетах. Он полностью механический, обладает высокой надежностью, прост в эксплуатации.
На рис. 3.20 показана кинематическая схема указателя приборной скорости со стрелкой, указывающей предельное значение в зависимости от высоты полета, что предусмотрено НЛГС-3. Погрешность индикации предельного значения скорости в диапазоне 300 – 800 км/ч должно быть не более 7 – 10 км/ч. В указателе УС-2 отсутствует канал предельного значения скорости.
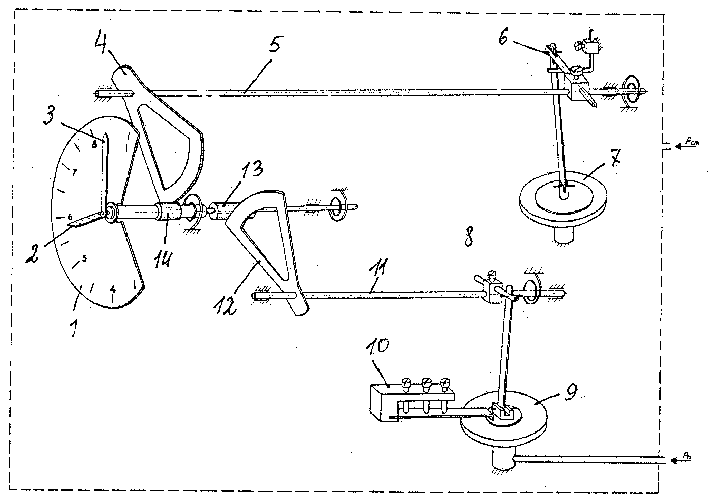
Рис. 3.20. Кинематическая схема указателя приборной скорости: 1 – шкала; 2 – стрелка предельной скорости; 3 – стрелка скорости; 4 – сектор; 5 – ось; 6 – поводковый механизм канала ограничения скорости; 7 – анероид; 8 – поводковый механизм канала измерения скорости; 9 – манометрическая коробка; 10 – лекало; 11 – ось; 12 – сектор; 13 – трибка с осью канала измерения скорости; 14 – трибка с осью канала ограничения скорости
Оценка манометрического способа измерения скорости
За критерий оценки манометрического способа измерения скорости примем ожидаемую погрешность. Судя по характеру зависимости скорости от динамического давления согласно формуле (3.11), самым сложным является диапазон малых, околонулевых скоростей.
В основе принципа действия манометрического способа лежит баланс сил:
fдв=fтр, (3.16)
где fдв– движущая сила манометрической коробки;fтр– приведенная сила трения механизма прибора. В свою очередь, движущая сила зависит от приращения динамического давления, приходящегося на единицу скорости и площади манометрической коробки:
![]() , (3.17)
, (3.17)
где Fэф– эффективная площадь, равная
![]() ,
,
где r– радиус жесткого центра,R– радиус мембраны манометрической коробки.
Величина приращения ΔРзависит от приращения скорости Δvи от градиента давления по скорости при данном ее значении:
![]() . (3.18)
. (3.18)
Поскольку нас интересует диапазон околонулевых скоростей, то градиент dPд/dvопределим из формулы (3.11) приε= 0,ξ= 1:
![]() . (3.19)
. (3.19)
Подставляя значение градиента по формуле (3.19) в формулу (3.18), а значение ΔРдпосле этого в формулу (3.17), получим значение движущей силы манометрической коробки в виде:
![]() . (3.20)
. (3.20)
Приняв Δvза погрешность измерения, получим ее значение по (3.16) и (3.20):
![]() ,
м/с, (3.21)
,
м/с, (3.21)
[fтр]
в кг, [Fэф] в
метрах квадратных, [ρ] в![]() ,
[v] в м/с.
,
[v] в м/с.
Таблица 3.7
|
v, |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
50 |
60 |
100 |
|
Рд, мм вод. ст. |
0 |
0,1 |
0,5 |
1,1 |
1,9 |
3 |
4,3 |
5,9 |
7,7 |
9,8 |
12,1 |
17,4 |
48,4 |
|
|
- |
0,02 |
0,08 |
0,11 |
0,13 |
0,16 |
0,25 |
0,35 |
0,38 |
0,42 |
0,46 |
0,56 |
0,94 |
В таблице 3.7 приведены величины давлений и градиента динамического давления по скорости в диапазоне малых скоростей. Из нее видно, что эти величины чрезвычайно малы. Для создания необходимой движущей силы по формуле (3.20) следует увеличивать эффективную площадь, что влечет за собой увеличение габаритов указателя. Стремление получить манометрическую коробку с приемлемыми характеристиками приводит к неразрешимым технологическим проблемам: материал коробки должен быть сверхтонким для получения требуемой величины перемещения центра на малых скоростях. Такая коробка на больших скоростях становится неработоспособной.
В настоящее время производство России выпускает много приборов с различными диапазонами измерения скорости. Но все они начинают измерять скорость не менее, чес с 50 км/ч. Например, указатели Ус-250, УС-350, УС-450, УС-700 начинают измерять с 50 км/ч, УС-800 – со 100 км/ч; УС-2 – с 80 км/ч; УС-1, УС-1600 – со 150 км/ч.
|
|
Рис. 3.21. Типовая зависимость погрешности указателя индикаторной скорости от измеряемой величины |
На рис. 3.21 приведена типовая зависимость инструментальной погрешности указателя индикаторной скорости в диапазоне измерения согласно формуле (3.21). При нулевой скорости погрешность стремится к бесконечности. При увеличении скорости к бесконечности погрешность стремится к нулю. Практически уже на средних скоростях нет проблем в достижении требуемой точности указателей, датчиков и сигнализаторов скорости.
3.3. Тенденции развития приборов для измерения скоростных параметров
Указателю приборной скорости уделено большое внимание в силу его принципиальной важности как пилотажного прибора, используемого на самых ответственных этапах полета – взлете и посадке. В связи с внедрением экранной индикации утвердилась тенденция, при которой истинная воздушная скорость и число Маха не применяется на борту пассажирского самолета в виде отдельных приборов, как это было на самолетах с аналоговым оборудованием. Их индикация производится на экранах СЭИ. В основе такого решения лежит тот факт, что истинная скорость и число Мявляются менее ответственными параметрами на этапах взлета и посадки. Истинная скорость вычисляется по уже известным формулам (3.11) и (3.12). При этом учитываются как плотность, так и температура воздуха, которые меняются с изменением высоты полета.
При больших скоростях полета устойчивость, управляемость и экономичность самолета становятся все больше зависимыми от числа М. Для этого на борту самолета имеется индикация о числеМ[13, 14]. ЧислоМподсчитывается по формуле на дозвуковой скорости
![]() , (3.22)
, (3.22)
и по формуле на сверхзвуковой скорости
![]() . (3.23)
. (3.23)
Таблица 3.8
|
|
Высота, км |
Диапазон измерения, число М |
Допустимые погрешности, число М |
|
0 |
от 0,6 до 1,3 |
± 0,04 | |
|
4 |
от 0,6 до 2 |
± 0,07 | |
|
8 |
от 0,6 до 2,4 |
± 0,07 | |
|
12 |
от 0,6 до 2,5 |
± 0,07 | |
|
16 |
от 0,8 до 2,5 |
± 0,09 | |
|
20 |
от 1,5 до 2,5 |
± 0,09 | |
|
Рис. 3.22. Механический указатель М-2,5 |
25 |
от 1,1 до 2,5 |
± 0,14 |
Указатель М-2,5 применяется на сверхзвуковых самолетах в качестве резервного прибора.
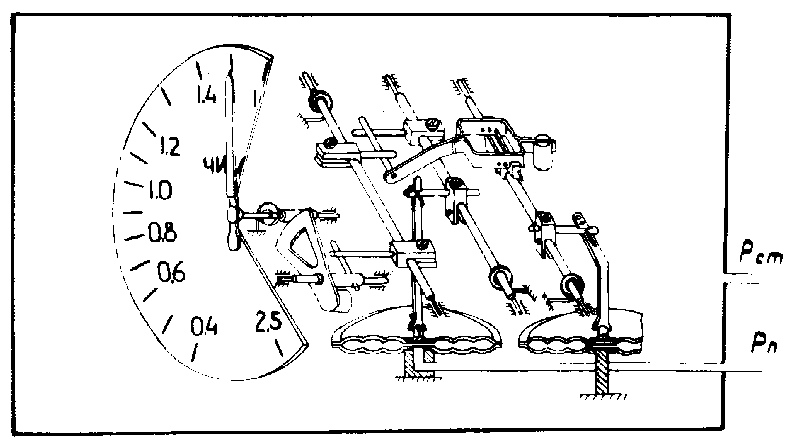
Рис. 3.23. Механизм указателя М-2,5
Для самолетов различных классов производство России выпускает механические приборы с индикацией как одного воздушного параметра, так и нескольких параметров: только vпр; толькоМ; толькоvист;vпр+ vист ;vпр+ М. Совмещение делается с целью экономии информационного поля приборной доски самолета и удобства считывания информации.
На рисунке 3.24 показан индикатор комбинированного прибора КУС 730/1100, который указывает vпрпо внешней шкале иvистпо внутренней шкале. Самым интегрированным индикатором из всех скоростных приборов является индикатор электромеханического прибора УСИМ. Он является предвестником электронной индикации. Прибор показывает приборную скорость по внешней шкале и числаМс помощью шкалы на диске, вращающемся в окошке. Кроме измеряемых параметров индицируются: заданное значение скорости (белый треугольник), предельное значение скорости (стрелка-зебра), критическое значение скорости (vmax max , треугольник за стрелкой-зеброй), отказ максимально допустимой скорости (бленкерvмдв окошке), отказ заданного значения скорости (бленкерvзадв окошке), отказ канала числаМ(бленкер-шторка на фоне шкалы числаМ).
|
|
|
|
Рис. 3.24. Комбинированный указатель КУС 730/1100 |
Рис. 3.25.Комбинированный Указатель УСИМ |


Общая идеология авионики такова:
- если позволяет степень надежности, то все параметры индицировать на экранах СЭИ;
- особо ответственные параметры (особенно пилотажные) индицировать с помощью механических приборов. К ним относятся приборная скорость, высота полета, вертикальная скорость, магнитный курс. Следует только отметить, что такая идеология полностью относится к гражданским большим пассажирским самолетам.
Сравнительные характеристики отечественных и зарубежных указателей скорости представлены в таблице 3.9 и на графике рис. 3.26.
.
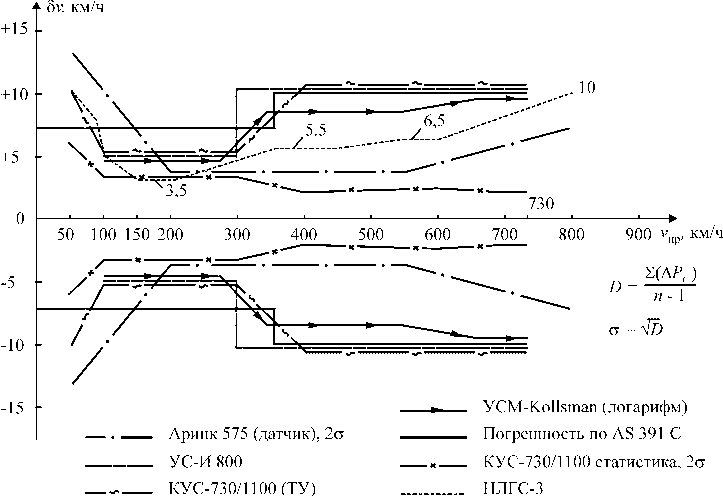
Рис. 3.26. Графики погрешностей указателей приборной скорости