

5.1. Инвариантный измеритель скорости
В настоящее время информацию о скорости самолета получают с помощью аэродинамических измерителей, которые нуждаются в улучшении метрологических характеристик. Как информационный параметр скорость полета (число М) характеризует длиннопериодическое движение с низкими рабочими частотами. Высокочастотные помехи, например шумы решающих и выходных устройств измерителя скорости, нейтрализуются с помощью фильтров. Однако существует динамическая погрешность, пренебрегать которой нельзя и оценка которой возможна при исследовании системы "среда полета – самолет – измеритель скорости". Среда в данном случае характеризуется физическими свойствами атмосферы: изменением статического давленияРств зависимости от высоты полета над уровнем моря, горизонтальными и вертикальными составляющими порывов ветра. Тип самолета определяет максимальное ускорение по направлению полета, скороподъемность, скорость изменения угла атаки. Параметры измерителя скорости отражают степень рациональности его конструкции. Особенностью рассматриваемых измерителей является наличие пневматических емкостей и сравнительно длинных воздухопроводов, в связи с чем постоянные времени каналов полногоРпи статическогоРстдавлений достаточно велики [44].
|
|
Рис. 5.2. Структурная схема измерителя воздушной приборной скорости самолета |
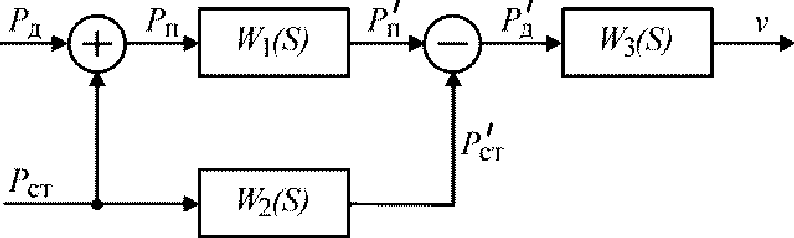
Рассмотрим
простейший измеритель воздушной
приборной скорости (рис. 5.2) в виде
двухканальной системы автоматического
регулирования, где W1(S),
W2(S),
W3(S)
– передаточные функции каналов
полного, статического давлении,
решающего и выходного устройств
измерителя. Обратим внимание на то, как
формируется в измерителе информация о
скоростном напореРд . Видно,
что статическое давлениеРстпроходит через оба звенаW2(S)
иW1(S).
Скоростьvопределяется
искаженной величиной скоростного напора![]() ,
так как он зависит от искаженных величин
полного
,
так как он зависит от искаженных величин
полного![]() и статического
и статического![]() давлений. В соответствии со структурной
схемой напишем систему уравнений
измерителя скорости в операторной
форме.
давлений. В соответствии со структурной
схемой напишем систему уравнений
измерителя скорости в операторной
форме.
![]() , (5.1)
, (5.1)
![]() , (5.2)
, (5.2)
![]() , (5.3)
, (5.3)
![]() , (5.4)
, (5.4)
![]() . (5.5)
. (5.5)
Решая систему уравнений (5.1 – 5.5) относительно скорости v(s), получим полное уравнение измерителя
![]() . (5.6)
. (5.6)
Из уравнения видно, что в отличие от стационарного режима в динамическом режиме скорость vзависит от двух величин:РдиРст. Передаточные функции каналов измерителя представим в виде
![]() ;
;
![]() , (5.7)
, (5.7)
где τ1 ,τ2 ,Т1 ,Т2 – время чистого запаздывания и постоянные времени каналов полного и статического давлений. С учетом значений передаточных функции из уравнения (5.6) получим выражение динамической погрешности при скачкообразных возмущениях поРдиРстприτ1=τ2 = 0.
![]() , (5.8)
, (5.8)
где dv/dPд– производная зависимости воздушной приборной скорости от скоростного напора при определенном значении скорости полетаv; ΔРди ΔРст– уровни возмущений по каналамРдиРст.
Из-за малости величин τ1 иτ2 и для упрощения дальнейших исследований их влиянием на погрешность пренебрегаем. Первая составляющая в квадратных скобках выражения (5.8) определяет погрешность по каналуРп.Учитывая, что приращение скорости самолета в длиннопериодическом движении происходит медленно и постоянная времени Т1по сравнению с Т2, как правило, мала, то в качестве доминирующей можно рассматривать погрешность, связанную с изменением статического давления или другими возмущениями атмосферы. Эта погрешность определяется вторым слагаемым выражения (5.8)
![]() , (5.9)
, (5.9)
а ее максимальное значение можно представить как
![]() . (5.10)
. (5.10)
Если возмущение по каналу Рстизменяется по пропорциональному закону ΔРст (t) = Kt, то исследуемая погрешность будет иметь вид
![]() , (5.11)
, (5.11)
где К– уровень возмущения по каналуРст.
В данном случае исследуется динамическая погрешность скорости полета самолета с учетом только пневматических параметров каналов Рст иРп, что совпадает с вариантом, когда собственные динамические характеристики измерителя близки к идеальным. Это дает возможность подчеркнуть физическую сущность исследуемой динамической погрешности, возникающей из-за естественной связи каналовРп иРст измерителя. Целесообразность этого подтверждается и тем, что в полете меняются только параметры пневматических каналов.
На рис. 5.3 показана
зависимость постоянных времени каналов
Рст иРп, от высоты полета при
различных скоростях, где
![]() – кратность изменения постоянной
времени в каналеРп; Т01 – начальное
значениеТ1 в нормальных условиях;Р0 – начальное атмосферное
давление;Рд(v) –
давление скоростного напора в зависимости
от скорости полета;
– кратность изменения постоянной
времени в каналеРп; Т01 – начальное
значениеТ1 в нормальных условиях;Р0 – начальное атмосферное
давление;Рд(v) –
давление скоростного напора в зависимости
от скорости полета;
![]() – кратность изменения постоянной
времени в каналеРст;Т02 –
начальное значениеT2
в нормальных условиях.
– кратность изменения постоянной
времени в каналеРст;Т02 –
начальное значениеT2
в нормальных условиях.
|
|
Рис. 5.3. Зависимость постоянных времени Т1 иТ2 от режима полета самолета: 1 – v= 1350 км/ч; 2 – v= 500 км/ч; 3 – v= 200 км/ч |

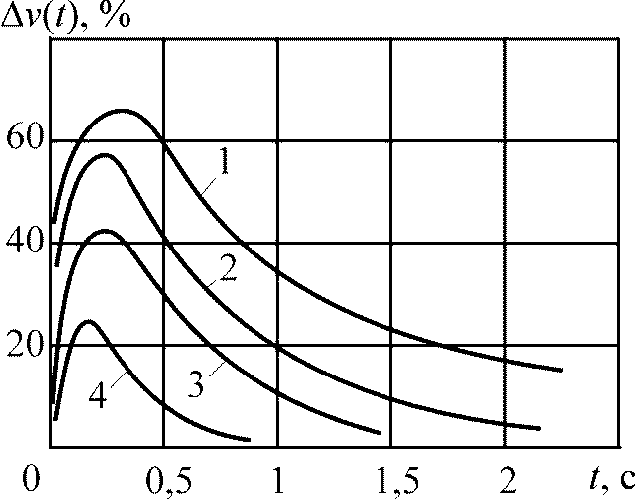
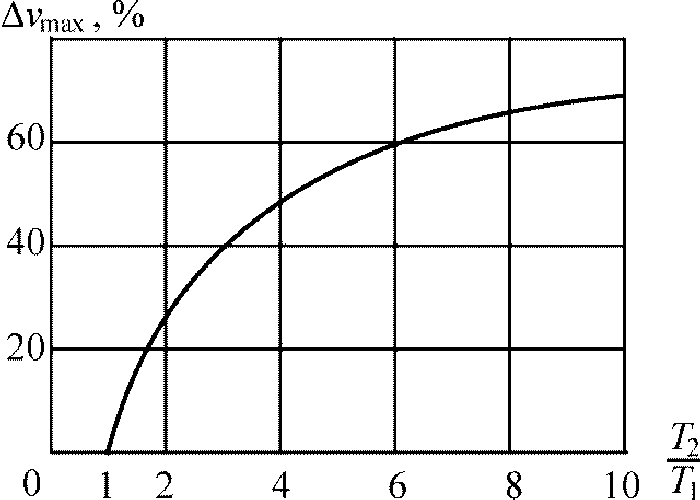
Из рис. 5.3 следует, что Т1 меняется значительно меньше, чемТ2 . Такое расхождение в изменении постоянных времени каналов усиливает связь между ними и увеличивает динамическую погрешность, что следует из уравнений (5.9) – (5.11). Погрешность измерителя скорости возрастает при увеличении отношенияТ2/Т1 и при 10-кратном превышении значенияT2 может достигать 70% (рис. 5.4 – 5.5).
|
|
|
|
Рис. 5.4. Погрешность измерителя скорости в зависимости от соотношения постоянных времени Т1иТ2: 1 – Т2/Т1= 10;2–Т2/Т1= 6; 3–Т2/Т1= 4; 4 –Т2/Т1= 2 |
Рис. 5.5. Зависимость максимальной динамической погрешности измерителя скорости от отношения Т1/Т2 |
Необходимо подчеркнуть, что установленная связь между каналами приводит к необходимости исследования динамической погрешности измерителя скорости также в короткопериодическом движении самолета. Изменение высоты полета и угла атаки, порывы ветра – все эти факторы вызывают появление дополнительной методической погрешности измерителя скорости, которая на некоторых режимах полета может достигать недопустимо большой величины. Например, погрешность от потока несущего винта вертолета может составить 70 км/ч, что приводит на малых скоростях полета к полной неработоспособности измерителя скорости. На пассажирских и транспортных самолетах проявление погрешности наиболее вероятно на режимах взлета и посадки, маршруте при турбулентной атмосфере, при порывах ветра. Эту динамическую погрешность можно устранить или свести к минимуму, если выполнить необходимое для двухканальной системы автоматического регулирования условие инвариантности (равенства передаточных функции каналов):
![]() . (5.12)
. (5.12)
В этом случае погрешности, определяемые уравнениями (5.9) – (5.11) полностью отсутствуют, т.е. измеритель становится инвариантным к аэродинамическим возмущениям в процессе полета.
Согласно теории инвариантности систем условие (5.12) является необходимым, но не достаточным. Нужно показать физическую реализуемость предложенного условия инвариантности. В линейной динамической модели измерителя с передаточными функциями каналов, соответствующими формулам (5.7) условие абсолютной инвариантности к аэродинамическим возмущениям сводится к двум равенствам:
τ1=τ2 , (5.13)
Т1=Т2 . (5.14)
Время чистого запаздывания τв .каналах зависит от длины воздухопроводов и скорости звука. Из этого следует, что условие (5.13) выполняется простым уравниванием длин пневматических каналов давленийРстиРп .
Постоянные времени трактов равны [45]
![]() ;
;
![]() ,
,
где μ0—коэффициент динамической вязкости воздуха в нормальных условиях;l1,l2– длина воздухопроводов полного и статического давлений;V1,V2– внутренние объемы пневматических камер каналов полного и статического давлений;d1,d2– внутренние диаметры воздухопроводов полного и статического давлений;Qн,Qз– абсолютная температура у земли и на высоте полета самолета.
Учитывая, что каналы РпиРстнаходятся в одних температурных условиях, зависимость (5.14) можно записать в видеТ2/Т1= 1 или
 . (5.15)
. (5.15)
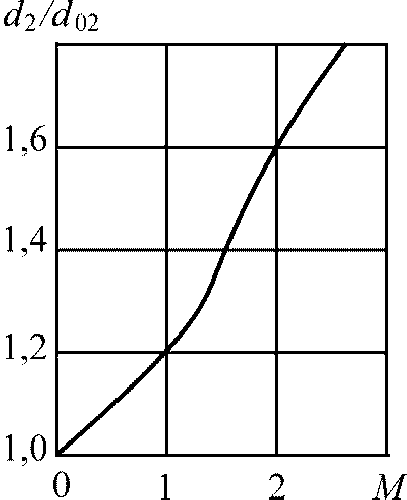
Из выражения (5.15) видно, что выполнение условия инвариантности можно обеспечить, изменяя либо диаметры воздухопроводов, либо внутренние объемы пневматических камер измерителя. В случае изменения диаметра воздухопровода статического давления необходимо соблюдать зависимость
![]() , (5.16)
, (5.16)
где d02– начальное значение диаметраd2(рис. 5.6).
|
|
Рис. 5.6. Изменение диаметра трубопровода канала статического давления в зависимости от числа М |
Если условие инвариантности поддерживается за счет изменения внутреннего объема пневматической камеры полного давления, закон регулирования объема имеет вид
 , (5.17)
, (5.17)
где ΔV1иV01– изменение и начальное значение объемаV1.
Регулирование объема в канале полного давления по закону (5.7) является наиболее удобным способом обеспечения инвариантности.
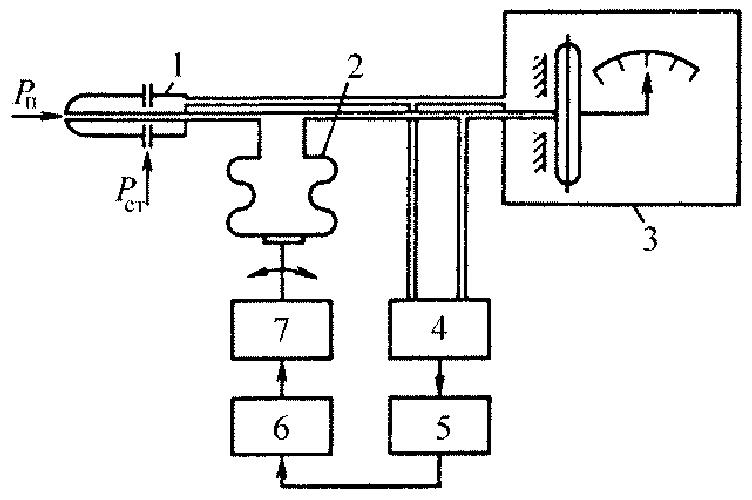
Измеритель приборной воздушной скорости (рис. 5.7) защищен от аэродинамических возмущений. В стационарном режиме полета давление Рп, поступающее на вход приемника воздушного давления 1 (ПВД), подается по трубопроводу в переменную пневматическую емкость 2, в объем чувствительного элемента измерителя скорости 3 и преобразователь 4 отношения давленийРдиРст . Статическое давлениеРстпо трубопроводу поступает в корпус измерителя скорости 3. Чувствительный элемент воспринимает давлениеРдкак разность давленийРпиРст . В нестационарном режиме давление возмущения или изменениеРств ПВД заполняет объем корпуса измерителя скорости и поступает в объем чувствительного элемента, переменную пневматическую емкость 2 и преобразователь 4. Сигнал с преобразователя проходит через усилитель 5, включает двигатель 6 и через редуктор 7 воздействует на емкость 2 в соответствии с законом (5.17). Это означает, что в процессе полета автоматически выполняется условие инвариантности (5.12).
|
|
Рис. 5.7. Инвариантный измеритель воздушной приборной скорости самолета |
На малых высотах полета ЛА расхождение постоянных времени в каналах РстиРпсравнительно невелико (см. рис. 5.3). Поэтому, например, для вертолетного измерителя скорости закон (5.17) можно выполнить только для одного значения отношенияРп/Рст[а.с. 908150 (СССР)]. Это значительно упрощает конструкцию измерителя скорости, но не позволяет достичь абсолютной инвариантности на всех режимах полета. Но даже при использовании упрощенного варианта измерителя скорости на вертолете помехи от аэродинамических возмущений снижаются на целый порядок. Для высокоманевренных самолетов такое упрощение недопустимо.
С учетом полученных алгоритмов, в цифровых измерителях можно компенсировать дополнительную погрешность (а также и динамическую погрешность по каналу Рп)путем введения их в алгоритмы формирования сигналов. При этом необходимо иметь в виду, что механические индикаторы скоростных параметров останутся нескомпенсированными.
|
|
Рис. 5.8. Регулируемая пневматическая емкость: 1 – штуцеры; 2 – герметичный корпус; 3 – вкладыши съемные; 4 – кожух; 5 – сильфон; 6 – винт; 7 – шкала
|

Для достижения условия инвариантности измерителя в ограниченном диапазоне измерения высоты и скоростей можно воспользоваться устройством с регулируемой пневматической емкостью, величина которой регулируется вручную в процессе полета (рис. 5.8). В качестве регулируемой емкости применен сильфон 5 и съемные вкладыши 3, которые заполняют избыточный объем для конкретной пневмосистемы. С помощью штуцеров 1 устройство подсоединяется к пневмосистеме согласно рис. 5.7. Вращая кожух 4 относительно корпуса 2, сводят колебания стрелки указателя 3 (рис. 5.7) к минимуму. По шкале 7 фиксируют величину объема емкости, необходимую для данного режима полета.