

Lektsii_El_privod
.pdfДля анализа механической характеристики асинхронного двигателя рассмотрим упрощенное выражение механической характеристики асинхронного двигателя (4.26):
|
|
|
М |
2 М к |
. |
(4.26) |
|
|
|
|||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
s |
|
sк |
|
|
|
|
|
|
|
|
|
|
|
|
sк |
s |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
При изменении скольжения двигателя от 0 до (1.2…1.5)s и на рабочей |
||||||||||||||
ветви |
характеристики отношение |
больше |
|
в 8…10 раз. Поэтому |
||||||||||
пренебрегаем |
слагаемым |
|
|
|
в знаменателе этой формулы. Выражение |
|||||||||
механической характеристики запишем в виде: |
|
|
||||||||||||
|
|
М |
2 М к |
s А s . |
(4.27) |
|
|
|||||||
|
|
|
|
|
||||||||||
|
|
|
sк |
1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
где |
- |
постоянный |
коэффициент, А |
2М к |
. Это есть уравнение |
|||||||||
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
sк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прямой линии. Значит, рабочая часть механической характеристики в рассматриваемых пределах линейна. Ближе к критическомy моменту (после М > 0,7... 0,75 ) характеристика становится нелинейной.
При к отношение s/ /s, поэтому пренебрегаем вторым
слагаемым в знаменателе, а уравнение механической характеристики примет вид:
М |
2 М к |
sк |
|
А2 |
. |
(4.28) |
|
|
|||||
|
s |
|
s |
|
||
Это выражение - уравнение гиперболы, значит, пусковая ветвь механической характеристики нелинейная.
4.3. Построение естественных механической и
электромеханической характеристик асинхронного двигателя
по каталожным данным
Характеристика асинхронного двигателя естественна при
Uдв = Uн, отсутствии добавочного сопротивления в цепи ротора и статора и при частоте источника питания, равной номинальной
частоте двигателя.
Естественную механическую характеристику по каталожным данным строят при расчетах переходных процессов электроприводa, определении:
частоты вращения регулируемого двигателя, т.е. в тех случаях, когда нужно точно знать частоту вращения и момент [18].
Исходные данные берут из таблички на щитке двигателя или из каталога
(5): номинальная мощность двигателя Рн, кВт; номинальная частота вращения nн. , или значение номинального скольжения sн (обычно в процентах); кратность критического момента Мк/Мн, для двигателей серии
4А ее обозначают μк; кратность пускового момента Мп/Мн обозначают μп;
кратность минимального момента Мmin/Мн - μmin; критическое скольжение –
Естественную механическую характеристику АД строят по пяти точкам с
соответствующими координатами:
Первая точка - синхронная угловая скорость ωо = 2πf/р или ωо = πnо/30 с ,
где f - частота питающей сети; nо = 60f/р; |
p – число пар полюсов |
|
(определяется из типоразмера электродвигателя). |
В каталожных данных |
|
при f = 50 Гц синхронная частота вращения двигателя |
= 3000, 1500, 1000, |
|
750, 600, 500 и т.д. мин . Момент двигателя при ωо |
равен нулю, т.е. эта |
|
точка лежит на оси ординат – частоты вращения; |
|
|
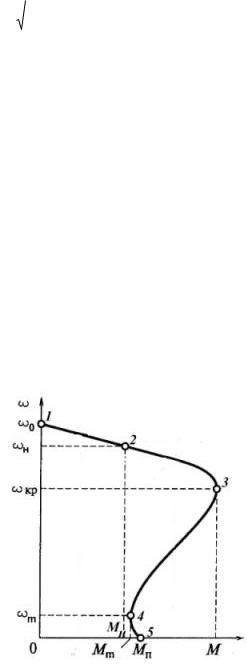
Вторая точка – номинальные: частота вращения ωн = πnн/30 или н |
(1- |
sн), с и момент Мн = Рн • 10-3/ ωн, Н•м. |
|
Третья точка – критические: момент Мк Мн к и угловая скорость ωк =
ωо(1 - sк).
Если значение критического скольжения не приводится в справочной литературе, его определяют по формуле:
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
|
|
sн к |
к |
2sн (к 1)1 |
||
s |
|
|
|
|
|
|
. |
к |
|
|
|
|
|||
|
|
12sн ( 1) |
|||||
|
|
|
|||||
Четвертая точка – минимальные: момент Мм = Мн |
скорость |
ωм = ωо(1 - sм), sm= 6/7 для всех двигателей:
Пятая точка - пусковой момент Мп = Мн п, ωо = 0.
Для более точного построения механической характеристики в области критического скольжения необходимо взять несколько промежуточных точек и определить значения момента по (4.20).

Рис. 4.3. Построение естественной механической характеристики
асинхронного двигателя.
Соединив плавной линией рассчитанные точки, получим график механической характеристики асинхронного двигателя (рис.4.3). На этой же рисунке пунктиром приведен график механической характеристики,
построенной по уравнению (4.19).
Естественная электромеханическая характеристика асинхронного двигателя I = f(ω) нужна при построении нагрузочных диаграмм для проверки двигателя на нагрев.
Рис.4.4. Построение естественной электромеханической
характеристики асинхронного двигателя.
Исходные данные можно взять из таблички двигателя и каталога:
номинальная мощность двигателя Рн, кВт; номинальное линейное напряжение двигателя Uн, B; номинальные коэффициенты: полезного действия ηн и мощности cosφ; кратность пускового тока 1п; номинальное и критическое скольжение sн, sк. Естественную электромеханическую характеристику строят по четырем характерным точкам:
Первая точка имеет координаты :синхронная угловая скорость

ωо = 2πf/р или ωо = πnо/30 |
и ток |
статора, соответствующий ωо (ток |
намагничивания) : |
|
|
Ic = I н(sinφн - cosφн/2 |
к), |
(4.30) |
где к - кратность критического момента ;
Вторая точка соответствует номинальным значениям:
Iн = Pн • 103/(√ • Uн • ηн • cosφн); ωн = ωо(1 - sн);
Третья точка соответствует критическому скольжению двигателя:
ωк = ωо(1 - sк); Iк = (0,7…0,8)Iпуск
Четвертая точка - пусковая: Iпуск = Iн • iп; ω = 0
Соединив полученные точки плавной линией, получим график электромеханической характеристики. Обычно ее строят на одном графике с механической (рис.4.4).
4.4. Искусственные механические характеристики
асинхронного двигателя
Асинхронные двигатели, применяемые в сельскохозяйственном производстве, редко работают на естественной механической характеристике. Это вызвано несколькими причинами. Во-первых, при включении двигателей в сеть возникают большие пусковые токи, которые вызывают понижение напряжения на зажимах электродвигателей. Во-
вторых, для выполнения требований технологии к электроприводу применяют регулировки или поддержание на заданном уровне координат двигателя (ω, М, I, P). Например, в обкаточных стендах или установках вентиляции помещений можно применять регулировки частоты вращения путем изменения напряжения, частоты и сопротивления в цепи ротора.
Таким образом, асинхронные двигатели в рассмотренных случаях
работают на искусственных характеристиках, когда Uдв ≠ Uн или rдоб, хдоб ≠ 0
или fсети ≠ fном
4.5. Влияние изменения напряжения сети на
характеристики АД
Напряжение на обмотке статора изменяют с целью ограничения пусковых токов или регулирования скорости асинхронного двигателя. Напряжение регулируют с помощью автотрансформатора, синхронного генератора или специальными полупроводниковыми
регуляторами напряжения.
Из уравнения механической характеристики (4.10) следует, что для любой частоты вращения асинхронного двигателя при постоянстве r1, r2' и хк момент двигателя пропорционален квадрату напряжения:
M |
|
|
3r'2 s |
|
|
|
|
U 2 |
AU |
2. |
||
|
|
|
|
|
|
|
||||||
|
|
0 |
[(r s r' |
2 |
)2 |
(x |
k |
s)2 |
] 1 |
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|||
Таким образом, по естественной механической характеристике,
построенной при Uн , можно легко построить искусственную для напряжения
U1 < Uн:
|
|
Миск/Ме = U12/U12ном |
|
|
(4.33) |
|||||||||||
отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U 2 |
|
|
U |
н |
U |
2 М |
|
(1 U )2 |
|||
M |
|
M |
|
|
|
1 |
М |
|
( |
|
1 |
) |
|
|||
и |
e |
|
2 |
е |
|
|
|
е |
||||||||
|
|
U |
|
|
|
U н |
|
|
||||||||
|
|
|
|
|
1н |
|
|
|
|
|
|
|
|
|
|
|
, (4.34)
где U - относительное значение снижения напряжения на зажимах двигателя, ΔU = ΔU1 /Uн .
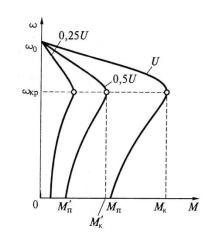
Синхронная частота вращения ωо и критическое скольжение sк от напряжения не зависят, поэтому остаются постоянными при изменении напряжения.
Порядок построения искусственной механической характеристики при изменении напряжения следующий: по паспортным данным двигателя строим естественную механическую характеристику; определяем относительное значение снижения ΔU1; задаемся значением частоты вращения ω1 и для нее на естественной характеристике определяем М1е;
определяем момент М1и при понижения напряжения по выражению (4.34);
задаемся значением ω2 и рассчитываем М2и и т.д. Соединяем расчетные точки и получаем график механической характеристики при пониженном на
ΔU напряжении (рис.4.5).
На практике чаще приходится рассчитывать не всю характеристику, а
только номинальный пусковой и критический моменты. Так, для проверки
двигателя по перегрузочной способности необходимо определить момент
Мк при заданном или расчетном снижении напряжения. |
С этой целью |
||
критический момент, соответствующий |
номинальному |
напряжению |
|
пересчитывают |
к заданному (сниженному) значению напряжения и |
||
сравнивают с максимальным |
|
|
|
рабочим: |
|
|
|
Мк(1 - |
U)2 > Mcmax |
|
|
Например, если Мк = 10 Н м, максимальный момент нагрузки
Мсмах = 7 Н м, то при работе на естественной характеристике ;
двигатель не "опрокинется". Если в сети произошло понижение напряжения на 20% из-за пуска рядом работающего мощного двигателя, то
Мк < Мсмах, т.к. Мк(1 - U)2=10(1 - 0,2)2 = 10 0,64 = 6,4 Н м
Следовательно, асинхронный двигатель «опрокинется» (остановится).
Такие же проверочные расчеты проводят при пуске.
Электромеханическая характеристика асинхронного двигателя (4.4)
зависит от напряжения в первой степени. Следовательно, ток изменяется пропорционально напряжению.
Iи = Iе(1 - U1). |
(4.35) |
Рис. 4.5. Механические характеристики асинхронного двигателя при
понижении напряжения на статоре.

4.6. Влияние на характеристики асинхронного двигателя
добавочных активного и индуктивного сопротивления в цепи
статора
Добавочное активное или индуктивное сопротивление включают в цепь статора для ограничения пусковых токов асинхронных двигателей [4].
Выясним поведение механической и электромеханической характеристик асинхронного двигателя. При введении rдоб и хдоб в цепь статора синхронная скорость не изменяется, а критическое скольжение и критический момент уменьшаются:
( ) |
|
|
|
; |
|
|
(4.36) |
|
|
|
|
|
|||
√( |
) |
|
|
||||
|
|
|
|
|
|||
|
|
√ |
|
|
|
|
|
|
|
( |
|
) |
; |
(4.37) |
|
; (4.38)
√( )
4.39)
√( )
Пусковой момент определим из уравнения (4.10) при s = 1:
;
( )
. (4.40)
( )
Следовательно, пусковой момент двигателя при введении в цепь

статора добавочного сопротивления снижается. Это явление необходимо учитывать при эксплуатации электроприводов различных технологических линий, отдельных машин и механизмов. При повышеннй нагрузке электродвигатель с включенными в цепи статора добавочными сопротивлениями может не запуститься, От этого может пострадать вся технологическая цепочка производства.
Рис.4.6. Механические характеристики асинхронного двигателя при введении в цепь статора добавочных сопротивлений: 1- активного, 2-
индуктивного, 3 – естественная характеристика..
Промежуточные точки искусственной характеристики можно определить по формуле (4.20), подставляя значения sки и Мки (рис.4.6).Для построения искусственной электромеханической характеристики при введении добавочного сопротивления запишем выражение механической характеристики (4.10):
М = 3∙I’2е ∙ r’2 / ωo ∙ s; |
(4.41 ) |
пусть I2 ≈ Iстат; тогда для любой постоянной скорости ω или s
Ме = Iе2∙А; Ми = Iи2∙А |
(4.42 ) |
где A = 3r2'/ ωos, откуда
Iè |
I |
|
Ì |
è |
å |
Ì |
|
||
|
|
|
å |