

Lektsii_El_privod
.pdfЗначит, для построения искусственной электромеханической характеристики
необходимо иметь графики Ме, Ми, Iе. Задаваясь значением скорости,
определим Ме, Ми и Iе, а затем по выражению (4.42) определим Iи.
4.7. Включение добавочного активного сопротивления в цепь
ротора
Добавочное активное сопротивление в цепь ротора асинхронного двигателя включают для ограничения пусковых токов и регулирования частоты вращения. Синхронная угловая скорость ωо не изменяется,
критическое скольжение sк растет, так как увеличивается сопротивление ротора в соответствии с формулой (4.12.):
sки (r'2 r2 об ) / 
 r12 xk2 .
r12 xk2 .
Значение критического момента Мк не изменяется, так как оно не зависит от r2
|
|
|
(4.43) |
M k 3U12 / 20 ( r12 xk2 ) r1. |
|||
Пусковой момент двигателя изменяется: вначале возрастает и при
(r'2 r' об ) / 
 r12 xk2
r12 xk2
достигает величины критического момента (Мп = Мк). Дальнейшее увеличение добавочного сопротивления приводит к снижению пускового момента.
Определим соотношение скольжения двигателя при работе на естественной и искусственной характеристиках. Момент двигателя на естественной характеристике:
M e |
|
|
2M ke |
|
|
se |
/ ske ske |
/ se |
|||
|
|
на искусственной характеристике:
M и |
|
|
2M kи |
. |
|
sи |
/ sки skи / sи |
||||
|
|
|
Приравниваем Ме и Ми, учитывая, что Мке, = Мки:
se / ske ske / se sи / skи skи / sи .
Обозначим: sе /sке = y; sи/sки = z. Тогда последнее уравнение
можно записать в виде
y +1/y = z +1/z.
Решим это уравнение:
y 2 1 |
|
z 2 1 |
; z( y 2 |
1) y(z 2 |
1); |
zy2 z yz 2 y; |
|||
y |
|
z |
|
||||||
|
|
|
|
|
|||||
y 2 z y yz 2 z; y ( yz 1) z( yz 1).
Уравнение имеет смысл при y = z. При yz = 1, y |
= 1/z или |
|
||
, что не имеет физического смысла, так как |
|
|
. |
Таким |
|
||||
образом при |
|
|
||

s / s s / s ; |
sи |
sе |
skи |
se |
r'2 |
r об |
|
|
|
r12 xk2 |
|
r'2 |
r' об |
. |
|||
e ke |
и kи |
|
|
|
|
|
|
|
|
|
se |
|
|
||||
|
|
|
|
sке |
|
|
|
|
|
|
|
r'2 |
|
r'2 |
|
||
(4.44) |
|
|
|
|
|
r 2 |
x2 |
|
|
|
|
|
|||||
|
|
|
|
|
1 |
k |
|
|
|
|
|
|
|
|
|
||
Для построения искусственной механической характеристики сначала необходимо построить естественную. Затем задаваясь значением момента М1, определить по графику sе1 и рассчитать sи1:
s |
|
s |
|
|
r'2 r об |
; |
|
|
|
|
(1 s |
|
). |
и1 |
е1 |
|
и1 |
о |
и1 |
||||||||
|
|
|
r'2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
На практике достаточно взять значение момента двигателя от нуля до Мк
(четыре-пять точек) и построить искусственную характеристику (рис.4.7).
Электромеханическую характеристику рассчитываем по выражению, как для случая с добавочным активным сопротивлением в цепи статора.
Рис. 4.7. Механические и электромеханические характеристики
асинхронного двигателя при введении добавочного резистора
в цепь ротора.
4.8. Влияние изменения частоты тока питающей сети
на работу АД
Изменение частоты питающей сети наблюдается при значительных
колебаниях нагрузки в сетях с источником электроснабжения ограниченной мощности (при питании от резервной электростанции). В приводах частоту тока сети изменяют с целью регулирования частоты вращения или поддержания ее на заданном уровне [19]. При изменении частоты тока сети двигатель переходит на искусственную механическую характеристику.
Частота вращения поля статора при изменении частоты от |
до : |
||
|
01 2 f1 / p; |
02 2 f2 / p, |
(4.48) |
отсюда |
|
|
|
02 / 01 f2 / f1 ; |
02 01 f2 / f |
1 |
|
Синхронная частота вращения изменяется прямо пропорционально изменению частоты сети. Определим характер изменения критического момента и критического скольжения. Для простоты пренебрегаем значением активного сопротивления статора .
Тогда выражение (4.14) будет иметь вид:
M |
3U12 |
|
|
|
0 2 f / p |
|
|
3U12 p |
(4.49) |
|||||
|
|
|
||||||||||||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
. |
||||
2 |
x |
k |
|
x |
k |
2 fL |
k |
8 2 L f 2 |
||||||
|
|
|
|
|
|
|||||||||
|
0 |
|
|
|
|
|
|
|
k |
|
||||
Значение критического момента изменяется обратно пропорционально
квадрату частоты. Для частот и , взяв соответственно отношение
и |
, получим: |
|
|
M k 2 / M k1 f12 / f22 или |
M k 2 M k1 f12 / f22 . |
(4.50) |
|
Для критического момента асинхронного двигателя при |
|||
sk |
r2 / xk r2 / 2 fLk . |
|
(4.51) |
т.е. значение критического скольжения изменяется обратно пропорционально частоте. Пересчитать скольжение с одной частоты на другую можно, если
взять отношение |
и |
sk 2 sk1 f2 / f1 . |
(4.52) |

Значение изменения частоты вращения
для разных частот тока:
k 0 k 0 (1 sk ) 0 sk |
|
2 f |
|
|
r2 |
|
r2 |
. |
(4.53) |
|
p 2 fLk |
pLk |
|||||||||
|
|
|
|
|
||||||
Если пренебречь изменением |
|
|
и |
в двигателе при |
|
|||||
изменении частоты, то ê будет иметь постоянное значение. Искусственные механические характеристики АД строят по выражению (4.19) или (4.20), для
которых определяют и . Задавшись значением s от 1 до нуля,
рассчитывают искусственную механическую характеристику (рис.4.8).
Рис. 4.8. Механические характеристики АД при изменении частоты.
4.9. Тормозные режимы асинхронных двигателей
Асинхронные двигатели, как и машины постоянного тока, обратимы и
могут преобразовывать электрическую энергию в механическую
(двигательный режим) и наоборот преобразовывать механическую энергию в электрическую (генераторный режим). Режим генераторного
(рекуперативного) торможения происходит с отдачей энергии в сеть. Он возможен при частоте вращения ротора асинхронного двигателя выше
синхронной ( |
> |
). |
|
|
|
|
|
|
Скольжение s = ( |
|
- |
)/ < 0 |
отрицательно, следовательно, в |
||||
выражении момента двигателя знак изменяется: |
|
|||||||
M |
3U 2 r ( s) |
. |
(4.54) |
|||||
( r s r |
)2 |
( x s)2 0 |
||||||
|
|
|
1 |
2 |
|
|
|
|
0 |
1 |
2 |
k |
|
|
|||
Рассмотрим особенности этого режима:
1) критическое скольжение не изменяется по значению, но меняется по

знаку: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r / |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
s |
|
|
r 2 |
x2 |
s |
к в . |
|
|
|
|
|
|
|
(4.55) |
|
||||||
|
кг |
2 |
|
|
1 |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
||
2) критический момент ( 4.14 ) будет больше критического момента |
в |
||||||||||||||||||||
двигательном режиме: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
M |
кг |
3U 2 |
/ 2 |
( r 2 |
x2 |
r ) . |
|
(4.56) |
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
0 |
1 |
|
k |
|
1 |
|
|
|||
З) в двигательном режиме активная мощность |
|
|
|||||||||||||||||||
(из схемы замещения) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
r2 |
|
|
|
3U12 |
r2 |
|
|
|
|
|
|
||
|
|
P |
3I 2 |
|
|
|
|
s |
|
|
. |
(4.57) |
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
2a |
|
|
|
2 |
|
s |
|
(r s r )2 (x |
s)2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
k |
|
|
|
|
|
При любом s > 0 > 0 . Активная мощность потребляется из сети и преобразуется в механическую.
При рекуперативном торможения при s < 0
P2a |
|
3U 2 |
( r / s) |
. |
(4.58) |
|
1 |
|
2 |
||||
|
|
|
|
|
||
|
|
( r s r )2 |
( x s)2 |
|
|
|
|
|
1 2 |
|
k |
|
|
Активная мощность |
|
изменяет свой |
знак. Механическая энергия, |
|||
подведенная с вала рабочей машины, преобразуется в электрическую и
отдается |
в |
|
сеть |
за |
|
|
|
вычетом |
|
потерь |
в |
электродвигателе. |
||||||||||||||||
Выясним |
|
|
характер |
|
|
|
изменения |
|
|
|
|
|
реактивной |
мощности: |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
2 |
|
(r r |
/ s)2 |
x 2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Q |
|
3U |
I |
sin |
|
|
|
|
1 |
|
2 |
|
|
|
k |
|
|
|
|
|
|
||||||
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
xk |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
sin 2 |
|
|
|
|
|
|
|
|
|
|
|
|
(4.59) |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
(r |
r / s)2 |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3U 2 |
|
|
xk |
|
|
|
|
3U12 xk s 2 |
|
|
. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
r )2 |
(x |
s)2 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
1 (r r / s)2 |
|
|
|
(r s |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
1 |
|
2 |
|
1 |
2 |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|||||
При любом |
значении |
скольжения |
знак |
|
|
|
|
|
|
не |
изменяется. |
В режиме |
||||||||||||||||
рекуперативного торможения реактивная мощность создает необходимое магнитное поле статора для возбуждения асинхронного двигателя.
Механическую характеристику асинхронного двигателя строят по
выражению ( 4.9). Характеристика располагается в четвертом или втором квадранте системы координат (рис.4.2) .
Рекуперативное торможение возможно в следующих случаях:
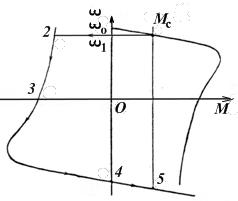
1) при работе с активным моментом подъемно-транспортных машин
(кранов, кран-балок, лебедок и т.д.). Допустим, лебедка поднимает груз со скоростью v. Момент сопротивления, создаваемый грузом, равен
(рис.4.10). В какой-то момент времени двигатель реверсируют.
Следовательно, он перейдет на другую характеристику, из точки 1 в точку 2.
Под действием сил инерции в первый момент времени ротор двигателя
вращается с частотой вращения |
(груз поднимается). Но так как |
||||
|
, то и |
⁄ < 0. Следовательно, груз тормозится и в точке 3 |
|||
останавливается в верхнем положении, а затем под действием |
и |
||||
начинает опускаться. В точке 4 |
= 0, но под действием груза |
|
|||
электродвигатель разгоняется до точки 5, |
|
|
|||
где |
. |
Груз опускается со скоростью |
, электрический |
||
двигатель находится в режиме рекуперативного торможения. |
|
||||
Рис. 4.10. Рекуперативное торможение асинхронного двигателя при опускании груза.
Потенциальная энергия поднятого груза преобразуется в электрическую и отдается в сеть за вычетом потерь;

2) при переходе многоскоростного двигателя с высокой частоты вращения
на низкую. Допустим, двухскоростной двигатель работает с моментом в точке 1 на второй частоте вращения (рис.4.11). Если отключить вторую
частоту вращения и включить первую, то электродвигатель перейдет в точку
2 характеристики первой частоты вращения. В этом случае , и
двигатель находится в режиме рекуперативного торможения. Запасенная двигателем и рабочей машиной кинетическая энергия преобразуется в
электрическую и отдается в сеть. А с уменьшением запаса кинетической энергии снижается и частота вращения, двигатель тормозится и переходит в
точку З характеристики, где ;
3)при горячей обкатке ДВС после ремонта. Эта операция осуществляется
времонтных мастерских и гаражах с помощью асинхронного двигателя с фазным ротором. В цепь ротора включают регулируемые резисторы. После окончания холодной обкатки выполняют горячую. С этой целью подают топливо в ДВС и запускают его. Постепенно увеличивают частоту вращения
двигателя выше и асинхронный двигатель переводят в режим
рекуперативного торможения. Регулируя значение сопротивления добавочного резистора в цепи ротора, изменяют загрузку ДВС и его частоту вращения [21].
Рис. 4.11. Рекуперативное торможение асинхронного двигателя при переключении частоты вращения.
Режим противовключения. Этот режим возникает в тех случаях, когда под действием внешних сил (активного момента рабочей машины или сил инерции) двигатель вращается в обратную сторону (против включения).
Рассмотрим эти случаи более подробно:

1) асинхронный двигатель с фазным ротором приводит в движение
лебедку, поднимающую груз (момент сопротивления |
). Подъем идет со |
|
скоростью |
(рис.4.12). Вводим в цепь ротора добавочное активное |
|
сопротивление |
, и двигатель переходит на искусственную механическую |
|
характеристику из точки 1 в точку 2. При введении сопротивления момент
двигателя уменьшается до значения , который меньше |
. Двигатель |
тормозится. В точке З двигатель остановится, но |
и под действием |
груза двигатель начнет вращаться в обратную сторону. Таким образом,
асинхронный двигатель перевели в тормозной режим противовключения. в
точке 4 , груз будет опускаться с постоянной угловой скоростью
Рис.4.12. Режим противовключения асинхронного двигателя при активном моменте.
2) асинхронный двигатель работает с рабочей машиной с угловой скоростью . Предположим, что в какой-то момент времени мы осуществили реверс этого двигателя. Следовательно, он переходит на другую механическую характеристику (рис.4.13). Под действием сил инерции в первый момент времени частота вращения агрегата не изменяется, и
двигатель переходит из точки 1 прямого вращения ротора в точку 2
обратного вращения.
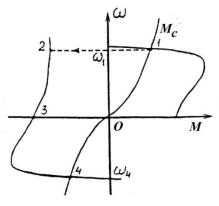
Рис.4.13. Реверсирование асинхронного двигателя
В точке 2 знаки момента и скорости разные, следовательно, режим
работы - тормозной. При таком движущем моменте двигателя знак скорости должен быть отрицательным, а он положительный, значит, от точки 2 до точки З имеет место режим противовключения. Механические характеристики асинхронного двигателя в режиме противовключения располагаются во втором или в четвертом квадранте.
Рассмотрим особенности работы асинхронного двигателя в режиме
противовключения. Прежде всего необходимо отметить, что если двигатель перевели в режим торможения, то преобразованная механическая мощность от рабочей машины или энергия сил инерции поступает в ротор, т.к.
для первого случая и = - для второго.
Электрическую мощность, поступающую из сети, можно определить по выражению
P |
|
3U 2 sr |
|
|
(4.60) |
||
(r s r |
)2 (x s)2 . |
||||||
|
|
|
1 |
2 |
|
|
|
|
1 2 |
k |
|
|
|
||
В режиме противовключения s > |
1, так как |
||||||
|
s |
0 ( ) |
|
0 |
. |
||
|
|
0 |
|
0 |
|||
|
|
|
|
|
|
||
Знак электромагнитной мощности не изменяется. Это говорит о том, что и сетевая активная мощность идет в ротор. Таким образом, в ротор асинхронного двигателя по двум каналам поступает энергия, которая расходуется в его сопротивлениях. Значение суммарной мощности велико, и
двигатель может быстро нагреться выше допустимой температуры. Для