

Lektsii_El_privod
.pdf(рис. 2.16). Откладываем значения токов переключения I1 и I2.
Их значения необходимо обосновывать, исходя из требований технологии к электроприводу и коммутационной способности двигателя. Предельное значение тока I1 берем равной (2...2,5)Iн. Ток I2 = (1,2...1,3)Iн. Через точки,
соответствующие значениям I1 и I2 на оси токов проводим две прямые,
параллельные оси частоты вращения. Соединяем точки 1 и ωо прямой линией, которая пересечется в точке 2 с током I2.
Дальнейший порядок построения от точки 2 к 3 и т.д. виден из рис. 2.16.
В результате построения необходимо попасть в точку пересечения естественной электромеханической характеристики и линии тока переключения I1 (точку 7). Если совпадения не получилось или число ступней не равно заданному, то необходимо изменить значение тока I2 или I1 и
повторить построение.
Рис. 2.16. Графический метод расчета сопротивлений пусковых
резисторов ДПТ НВ.
Определяем масштаб сопротивления:
m |
R |
|
Rн |
аг |
или m |
R |
rя |
аб |
; R |
m |
U |
I |
; |
|
|
|
|
|
|
н |
н |
|

|
U |
н |
|
|
Рн |
10 |
3 |
|
r 0,5 |
|
1 |
|
|
. |
|||
I |
|
|
U I |
|||||
я |
|
|
|
|
|
|
||
|
н |
|
|
|
н н |
|||
Определяем значения пусковых сопротивлений ступеней:
r1 mR дг; r2 mR гв; r3 mR вб; rя mR ба.
Проверяем правильность расчета:
I1 расч Uн rя r1 r2 r3
Полученное значение должно отличаться от заданного тока не более чем на 7...10%. При отклонении более 10% необходимо выполнить более тщательное построение и расчет.
2. Если число пусковых ступеней не задано, то в этом случае при построении необходимо попасть в точку пересечения линии тока I1 и
естественной электромеханической характеристики, а затем принять то число ступеней, которое получится.
Таким образом, процесс пуска двигателя в несколько ступеней,
изображенный на рис. 2.16, характерен тем, что ток двигателя во время
пуска колеблется в пределах от |
. В начале пуска |
, далее, по |
мере ускорения двигателя растет его ЭДС, вследствие чего начинает |
||
уменьшаться ток в цепи якоря двигателя, а следовательно, и момент |
||
двигателя. Когда ток достигает |
выключается часть пускового реостата с |
|
таким расчетом, чтобы ток двигателя снова достиг значения |
и т.д. |
|
По мере выведения пусковых резисторов сопротивление цепи якоря уменьшается, а следовательно, уменьшается и значение электромеханической постоянной, что приводит к уменьшению продолжительности пуска на каждой последующей ступени.

Глава 3.
Электроприводы с двигателями постоянного
тока поcледовательного возбуждения
3.1. Особенности работы ДПТ ПВ
Двигатели постоянного тока последовательного возбуждения широко применяют на электротранспорте, в приводе подъемно-транспортных механизмов. Необходимо отметить, что такие двигатели применяют в качестве стартеров для двигателей внутреннего сгорания. Двигатели последовательного возбуждения надежны по сравнению с другими машинами постоянного тока, так как они имеют обмотку возбуждения,
выполненную проводом большого сечения, и с малыми напряжениями между витками. Схема включения в сеть приведена на рис.3.1 , откуда видно, что ток возбуждения равен току якоря, который зависит от нагрузки двигателя.
Во время работы ток якоря изменяется от холостого хода до номинального значения (и более), следовательно, изменяется и поток возбуждения.
Рис. 3.1. Схема включения ДПТ ПВ: ОВ – обмотка возбуждения;
Я – обмотка якоря.
Вследствие этого невозможно дать аналитические выражения механической и электромеханической характеристик для конкретного двигателя, по которым можно было бы построить их графики. Для анализа механической характеристики машины постоянного тока последовательного

возбуждения реальный график намагничивания заменяют идеализированным - ломаным, линейным (рис.3.2 ).
Рис. 3.2. Кривые намагничивания машин постоянного тока
последовательного возбуждения: |
1 – идеализированная характери |
||
стика; 2 – реальная характеристика. |
|
|
|
Предположим, что двигатель работает |
на |
идеализированной |
|
характеристике (а) с нагрузкой |
, меньшей н |
(система не насыщена). Так |
|
как эта часть характеристики линейна, то |
|
|
|
Ф = кI, |
|
|
(3.1) |
где к – коэффициент пропорциональности, к = Ф /Iн. |
|
||
Электромагнитный момент: |
|
|
|
М = сФI = скI. |
|
|
(3.2) |
Уравнение ЭДС: |
|
|
|
Uí Å IR cÔ IR ckI (ck R)I . |
|
(3.3) |
|
где R - сопротивление якорной цепи. |
|
|
|
Из выражения (3.3) определяем электромеханическую |
|
||
характеристику: |
|
|
|
U í / ckI R / ck. |
|
(3.4) |
|
Из уравнения электромагнитного момента определим значение тока и подставим его в выражение электромеханической характеристики:

|
U í |
|
|
R |
|
|
U í |
|
|
|
R |
|
|
A |
|
B. |
(3.5) |
||
ck |
|
|
ck |
|
|
|
|
|
ck |
|
|
|
|||||||
M / ck |
ck |
M |
M |
||||||||||||||||
Зависимость между моментом и частотой вращения при насыщенной магнитной системе имеет гиперболический характер. Это справедливо для малонагруженных электрических двигателей, ток которых меньше номинального. При токе больше номинального наступает насыщение, поток двигателя не изменяется и механическая характеристика практически становится линейной. На холостом ходу остаточный поток равен
(0,02…0,09)Ф, следовательно, и характеристика а этой части становится близкой к линейной. Таким образом, характеристику двигателя постоянного тока можно разделить на три участка: 1, II, III (рис.3.3 ).
Нижний участок характеристики – 1 от = 0 до н линейный и соответствует насыщению магнитной цепи машины (Ф = const).
Средний – П - соответствует гиперболической зависимости момента от частоты вращения, для которой ось ординат является асимптотой.
Рис. 3.3. Механическая характеристика двигателя последовательного возбуждения.
Верхний - Ш участок имеет почти линейный характер и соответствует остаточному магнитному потоку. Особенностью механической
характеристики двигателя последовательного возбуждения является ее
большая крутизна в области малых значений момента.
Значительное увеличение частоты вращения при малых нагрузках обусловливается соответствующим уменьшением магнитного потока.
Уравнение (3.5) дает лишь общее представление о механической характеристике двигателя последовательного возбуждения. При расчетах этим уравнением пользоваться нельзя, так как машин с ненасыщенной магнитной системой обычно в современной практике не строят. Вследствие того, что реальные механические характеристики сильно отличаются от кривой, выраженной уравнением (3.5), построение характеристик приходится выполнять графо-
аналитическими способами.
3.2. Естественные электромеханическая и механическая
характеристики ДПТ ПВ
Электромеханическая и механическая характеристики ДПТ ПВ являются
естественными, eсли в ном в, Ф Фном и = 0. На практике для построения естественных характеристик используют обобщенные зависимости (универсальные характеристики) для двигателей данного типа
(рис.3.4).Универсальная характеристика дается в относительных величинах:
Н ; н ; н
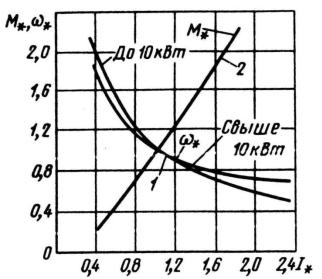
Рис. 3.4.Универсальные характеристики двигателей ДПТ ПВ. |
|
||||||||||
где I, M и |
- текущие значения тока, момента и угловой скорости |
|
|||||||||
двигателя; н , |
н и н |
- номинальные значения тока, момента и |
|
||||||||
угловой скорости двигателя. |
|
|
|
|
|
|
|
|
|||
Для построения характеристик двигателя задаемся несколькими |
|
||||||||||
относительными значениями тока двигателя |
|
на универсальной |
|
||||||||
характеристике и по кривым |
|
|
и |
|
определяем значения |
и |
|||||
[18]. Абсолютные значения тока, угловой скорости |
|
||||||||||
и момента: |
I i |
I |
; |
v ; |
M |
M |
. |
|
|||
|
1 |
1 |
í |
|
1 |
1 í |
1 |
1 |
í |
|
|
При построении характеристик стремятся значения относительных |
|
||||||||||
величин выбирать по возможности равномерно. |
Результаты расчетов |
|
|||||||||
заносим в табл.3.1. |
|
|
|
|
|
|
|
|
|
|
|
Затем задаемся значением |
и |
определяем |
координаты второй |
точки. |
|||||||
Результаты заносим в ту же таблицу. Таким образом, для заданного диапазона изменения угловой скорости или тока получим серию расчетных точек (не менее пяти).
Таблица 3.1
Данные для расчета электромеханической и механической
характеристик ДПТ ПВ
|
н |
|
Мн |
|
н |
|
|
|
|
|
|

3.З. Искусственные механические характеристики ДПТ ПВ
Механические характеристики ДПТ ПВ являются искусственными в следующих случаях:
в цепь якоря последовательно включают добавочный резистор;
изменяют напряжение питания машины;
параллельно якорю или обмотке возбуждения включают резистор.
На искусственных механических характеристиках двигатель работает при регулировании частоты вращения, ограничении пусковых токов и во многих других случаях, например, при снижении напряжения при пуске мощного двигателя. Искусственные механические
характеристики строят различными методами.
Аналитический мето построения искусственной характеристики при
изменении обавочного сопротивления в якорной цепи.
Добавочное сопротивление в якорную цепь вводится для ограничения
пускового тока или регулирования частоты вращения. Для любого значения частоты вращения и соответствующего тока I двигателя на естественной электромеханической характеристике уравнение ЭДС можно записать в виде
Uí cÔå e Ie räâ . |
(3.6) |
где Фе - магнитный поток двигателя, соответствующий току е.
При введении в цепь якоря добавочного сопротивления двигатель будет работать на искусственной характеристике. Тогда
Uí |
cÔè è Iè (räâ Räîá ). |
(3.7) |
где Фи , и , и - |
магнитный поток, угловая скорость и ток |
|
двигателя на искусственной характеристике. |
|
||
Определим значения угловых скоростей |
е |
и и из уравнений (3. 6) и |
|
(3.7 ) и возьмем их отношение: |
|
|
|
è |
U í I í (räâ Räîá ) cÔå . |
|
(3.8) |
å |
cÔè (U í Iåräâ ) |
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
Рис.3.5. Электромеханические характеристики ДПТ ПВ при введении |
|||||||||||||||
|
|
добавочного резистора. |
|
|
|
|
|||||||||
Если у двигателя |
на |
естественной и искусственной электромеханических |
|||||||||||||
характеристиках токи равны, т.е. |
е |
и |
, то равны и |
|
|||||||||||
потоки возбуждения: Фе |
|
|
Фи |
Ф (рис.3.5 ). |
|
|
|
||||||||
Выражение (3.8) с учетом сказанного запишем следующим образом: |
|||||||||||||||
|
|
|
è |
|
U í |
I1 (räâ Räîá ) |
, |
|
(3.9) |
|
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
å |
|
|
|
U í |
Iräâ |
|
|
|
|
|
|
|
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è |
å |
U í |
I1 (räâ Räîá ) |
. |
|
(3.10) |
|
|||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
U í I1räâ |
|
|
|
|
|
|
|
|
Таким |
образом, |
задаваясь на |
естественной |
электромеханической |
|||||||||||
характеристике значениями тока |
и угловой скорости е |
, определяем |
|||||||||||||
угловую скорость |
и |
на искусственной характеристике при введенном в |
|||||||||||||
цепь |
якоря добавочном |
сопротивлении |
для |
того |
же тока. |
||||||||||

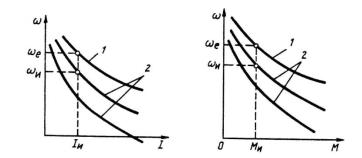
Построение искусственных электромеханических и механических характеристик при введении в цепь якоря добавочного сопротивления выполняем следующим образом. По универсальной характеристике и паспортным данным двигателя строим естественные механическую и электромеханическую характеристики. Определяем значение
сопротивления резистора |
|
об : |
|
|
|
|
|
|
|
||||
|
r |
r ; |
r 0,5 |
U |
í |
(1 ); |
|
|
|
P 103 |
|
||
r |
|
|
í |
|
, |
|
|||||||
I í |
|
U í |
|
(3.11) |
|||||||||
ä |
ÿ îâ |
ÿ |
í |
|
í |
|
I í |
||||||
|
|
|
|
|
|
|
|
||||||
где |
ов |
- сопротивление обмотки возбуждения; |
ов = 0,5 я; |
||||||||||
в |
я |
я |
я |
|
|
|
|
|
|
|
. |
||
По выражению (3.10 ) строим искусственную электромеханическую
характеристику для заданного сопротивления об. Для этого
задаемся током |
и определяем |
(рис.3.6). |
||
|
|
Uí I1(räâ Räîá ) |
. |
(3.12) |
|
||||
è1 |
å1 |
Uí I1räâ |
|
|
|
|
|
||
Рис. 3.6. Построение искусственных механических и электромеханических характеристик ДПТ ПВ аналитическим методом при включении добавочного сопротивления.