

книги из ГПНТБ / Новая геодезическая техника и ее применение в строительстве учеб. пособие
.pdfв |
Москве. Точность контроля на расстоянии до 200 м находилась |
в |
пределах погрешности, равной 1 см [V. 1]. |
Лазерный визир, как датчик створа, применялся для разбив ки трассы ленточного конвейера комплекса КТТО-2 Михайловско го комбината Курской магнитной аномалии [V. 11] для ориенти рования движущихся агрегатов в условиях карьера; выверки вра
щающихся |
цементных |
|
печей; съемки подкрановых |
путей |
||
Луганской |
ГРЭС и |
Красносулинский |
металлургический |
завод |
||
[V. 12]. |
|
|
|
|
|
|
Лазерный визир |
ЛВ- |
5 |
(рис. V. 9) |
создан на базе |
лазера |
|
ОКГ-13. Источник света устанавливается в корпусе, образующем вместе с двумя полуосями горизонтальную ось вращения прибо ра, покоящуюся на колонках (подставках) 5. Коллиматор 2 уста новлен в оправе, связанной с корпусом лазера посредством котировочных винтов. Поворот источника света в вертикальной плоскости осуществляется в пределах 10°, а в горизонтальной плоскости — на 360°. Для плавного и точного наведения прибо ра на объект используются микрометренные винты 3. Приведе ние вертикальной оси прибора в отвесное положение произво-' дится подъемными винтами подставки. Прибор снабжен контакт ным уровнем с ценой деления 20" на 2 мм дуги. Питание прибора комбинированное: или от сети переменного тока пли от аккуму ляторов напряжением 12 В. Потребляемая мощность около 20 Вт.
Лазерный визир ЛВ-5 применялся как датчик створа при раз бивке эстакады через железнодорожные пути у Рижского вокза ла в Москве [V. 24]; для контроля ровности поверхности (в соче тании со специальной «светочувствительной рейкой») взлетнопосадочной полосы Адлерского аэродрома и на других объектах.
§ |
V. 3. Автоматизация геодезического контроля |
с |
помощью прибора управления лучом (ПУЛ) |
При производстве глубинных и планировочных земляных ра бот и земляных сооружений линейного типа требуется обеспечить заданный уклон и ровность поверхности. Для этого перед нача лом земляных работ и в процессе их выполнения производится вертикальная геодезическая разбивка сооружений. Поскольку существующие землеройные машины не приспособлены к взаимо действию с высотными знаками, то оценку толщины срезки или досыпки грунта машинист землеройной машины определяет на глаз; в результате необходимая ровность участка или заданный уклон поверхности достигается многократной проходкой маши ны при частом повторном геодезическом контроле с помощью нивелира.
Большая трудоемкость геодезического контроля, затраты на создание и восстановление сети геодезических точек при выпол нении земляных работ, а также непрерывно возрастающие темпы и объемы строительства служат основанием для разработки и
200
постепенного перехода к полуавтоматическому и автоматическо му геодезическому контролю на основе дистанционного управ ления рабочим органом землеройной машины. Одно из решений
этой |
задачи — использование так |
называемых лучевых |
прибо |
||||
ров, |
где в качестве |
опорной линии |
или |
плоскости, от которой ве |
|||
дется |
измерение превышения, служит |
направленный |
световой |
||||
луч. Прибор, изготовленный на этом принципе, получил |
название |
||||||
прибор |
управления |
лучом |
(ПУЛ), |
одна из моделей |
которого |
||
(ПУЛ-3] выпущена |
малой |
серией |
и входит в комплект |
двухро- |
|||
Рис. |
V.10. |
Схема |
действия |
прибора |
управления |
лучом: |
|
/ — рабочий |
орган |
машины; 2 — |
фотоприемник; |
3 — линия з а д а н н о г о уклона; |
|||
|
4 — поперечное |
сечение |
луча; 5 — прожектор |
|
|||
торного экскаватора |
ЭДР-122 |
конструкции |
ВНИИземмаша. |
||||
ПУЛ-3 используется также и на других землеройных и планиро вочных машинах при выполнении опытно-производственных работ.
Геодезический контроль эффективен при срезке грунта рабо чим органом землеройной машины. При недостатке грунта тре буется его предварительная подсыпка до уровня, превышающего , проектный. ПУЛ-3 предназначен для обеспечения заданного ук лона, сооружений линейного типа (водоотводных канав, трубо проводов, земляного полотна шоссейных дорог и т. п.). Он состо ит (рис. V. 10) из прожектора 5 (направляющей станции) и фо топриемника 2 (приемной станции).
Прожектор устанавливается на земле. С его помощью фор мируется узконаправленный луч, который может быть ориенти рован в пространстве в соответствии с требованиями проектного уклона на объекте работ. Фотоприемник помещается на рабочем органе землеройной машины; его задача — прием информации, передаваемой направляющей станцией и выработка команд для управления вертикальным перемещением рабочего органа маши ны с целью удержания установленного на нем фотоприемника на оси луча прожектора. Рабочий орган землеройной машины по вторяет уклоны, задаваемые световым лучом. Наиболее эффек тивно применение ПУЛ-3 на землеройном агрегате, имеющем гидравлическую подвеску рабочего органа (ножа, отвала, струга и т. п.).
201
Направляющая станция включает прожектор и обтюратор с мотором, модулирующий инфракрасный луч. С помощью биприз
мы луч |
прожектора |
разделен |
симметрично |
равно |
сигнальной |
||
зоной (РСЗ), |
на |
две |
части. Верхняя часть луча модулируется |
||||
частотой |
900 |
Гц, |
н и ж н я я — 1500 |
Гц. Телесный |
угол |
луча равен |
|
1°10', а вертикальный раствор РСЗ составляет 2 мм на расстоя нии 100 м и около 10 мм на расстоянии 500—600 м. Прожектор установлен на алидаде, что позволяет осуществлять вращение его в горизонтальной плоскости на 360° и производить установку в заданном направлении. Вертикальный винт прожектора дает воз-
Рис. V.11. Принципиальная схема фотоприемника ПУЛ и управ ления гидравлическим приводом рабочего органа машины:
/ — усилитель; |
2— |
частотный |
фильтр; 3— |
электромагнитный привод з о |
|
лотника; 4— |
золотник; 5 — гидравлический |
насос; |
6 — фотоэлемент; 7 — |
||
|
луч |
прожектора; |
8 — рабочий |
орган |
машины |
можность изменять наклон луча и придавать РСЗ" заданный ук лон а. В оптическую систему прожектора включены два свето
фильтра— красный и синий. Граница |
раздела |
светофильтров |
|
установлена вертикально — перпендикулярно РСЗ |
луча. Это |
да |
|
ет возможность водителю землеройной |
машины по видимой |
ок |
|
раске луча судить о положении машины |
относительно оси луча. |
||
Таким образом, луч прожектора создает в пространстве две взаимно перпендикулярные плоскости, одна из которых исполь зуется для ориентировки движения машины в плане, а другая (РСЗ) — для ведения рабочего органа по проектному уклону. На деленный такими свойствами луч устраняет необходимость уста новки плановых и высотных знаков детальной геодезической раз бивки в зоне производства земляных работ.
Приемная станция включает |
фотоприемник, усилитель и |
пульт управления. Функциональная |
схема автоматического уп |
равления рабочим органом машины дана на рис. V. 11. Фотопри-
202
емник 6 устанавливается непосредственно на рабочий орган ма шины, а усилитель 1 и пульт управления 2 — в кабине машиниста. При отступлении рабочего органа с линии заданного уклона фо топриемник попадает в одну из зон модулированного светового луча. В этом случае с фотоприемиика снимается электрический сигнал преобладающей частоты, который затем усиливается, по ступает в пульт управления и на электромагнит 3 сервозолотника 4 гидравлического привода. В зависимости от частоты моду лированного света сервозолотник перемещается в ту или иную сторону и тем самым открывает путь для подачи рабочей жидко сти гидросистемы в поршневую или штоковую полости гидроци линдра. Синхронная работа гпдроцнлиндров возвращает рабо чий орган на линию заданного уклона, а фотоприемник — в РСЗ луча. Так как фотоприемник жестко связан с рабочим органом, то последний копирует профиль, задаваемый РСЗ при движении машины.
С помощью ПУЛ-3 были выполнены опытно-производствен ные работы по профилированию прямых с заданным уклоном, разбивке вертикальных и плановых круговых кривых, отрывке дренажных канав, планировке взлетно-посадочных полос грунто вых аэродромов и др. Для работы в автоматическом режиме применялся прицепной струг-метатель непрерывного действия. Приемная станция была подключена к электрозолотниковым распределителям управления вертикальным перемещением ра бочего органа машины с таким расчетом, чтобы оба гидроцилинд ра его подвески работали синхронно на подъем или опускание в зависимости от команд пульта управления. Фотоприемник кре пился непосредственно к кронштейну, связанному с ножом ма шины.
Геодезическое |
обслуживание |
ПУЛ а заключается |
в следую |
щем. До начала |
производства |
работ устанавливается |
направ |
ляющая станция на оси будущего земляного сооружения в 10— 40 м от землеройного агрегата. С помощью нивелира определяет ся отметка РСЗ' луча непосредственно у выхода из прожектора. Найденная отметка РСЗ сравнивается с проектной отметкой оси земляного сооружения в месте установки направляющей станции. Полученная разность определяет высоту установки фотоприем ника над режущей плоскостью рабочего органа машины. Изме нение горизонта РСЗ'возможно путем изменения высоты штати ва, а также путем поднятия или опускания корпуса прожектора на алидаде. После наведения прожектора на фотоприемник на шкале барабанчика устанавливается проектное значения уклона.
Точная установка приемника в РСЗ и необходимое заглуб ление рабочего органа машины производится полуавтоматиче ски при помощи кнопок «вверх» и «вниз» после начала движе ния машины. Затем включается тумблер «автомат» и контроль заданного уклона осуществляется автоматически непрерывно. Задачей водителя является лишь удержание машины в заданном
203
направлении. Система ПУЛ работает уверенно днем и ночью на расстоянии до 750 м при отклонении оптической оси фотоприем ника от направления луча до 6°, но при условии, что фотоприем ник не выходит из луча.
а)
Н,м |
r £ j S 24- |
|
IS |
24 |
|
|
|
|
|
|
61 |
|
|
v |
'Z2<f |
32 IS |
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
/6 |
|
|
|
|||
66 |
|
|
|
|
|
if |
|
3383l |
||
|
|
|
|
|
|
|
|
|
||
65 |
|
|
|
|
|
|
26 |
IS |
|
|
54 |
0 |
wo |
200 |
300 |
400 |
500 |
600 |
S,M |
||
5) |
|
|
|
|
|
5) |
|
|
|
|
Н,м |
|
|
|
|
H,M |
|
|
|
|
|
68 |
; 8 ( |
|
|
|
11,4 |
|
24 |
|
|
|
|
27 |
|
|
|
|
|
||||
51 |
2 ^ \ ъ |
л |
20 |
|
/2,2 |
|
|
23 |
|
|
44 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
66 |
|
|
|
ЗБ |
|
12,0 |
|
|
|
|
|
|
|
ч |
|
23 |
|
|
|
||
|
|
|
|
ir *28 |
l!,B |
|
|
|
||
65 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
10— |
|
|
|
|
|
64 |
0 |
WO |
200 |
5, м |
11,6 |
|
100 |
200 |
S, м |
|
|
|
|
||||||||
Рис. V.12.. Профили, |
полученные с |
помощью |
ПУЛа: |
|||||||
а — прямой |
|
участок; б — плановая |
кривая; е — вертикальная |
|||||||
кривая. Сплошной линией показан фактический |
профиль; |
|||||||||
штриховой — проектный; |
цифрами |
вдоль |
профиля — отклоне |
|||||||
ние фактического профиля от |
проектного в миллиметрах |
|||||||||
На рис. V. 12, а представлен профиль прямой длиной 680 м с уклоном 6,4, полученный с помощью ПУЛа за один проход ма шины. Для определения точности выравнивания поверхности по следу режущего органа машины выполнена нивелировка по точ кам через 10 м. На рисунке выписаны отклонения в миллиметрах фактического профиля от проектного. Среднеквадратичная ошиб ка выравнивания составляет 18 мм. Такую точность автоматиче ского выравнивания поверхности следует считать удовлетвори тельной, имея в виду, что нормативная точность составляла 50 мм. При геодезическом контроле с помощью нивелира норма тивная точность выравнивания достигается, обычно, за 3—6 про ходов машины.
На рис. V. 12, в дан профиль вертикальной кривой с радиусом кривизны 20 км. Для ведения рабочего органа по дуге верти кальной кривой ' был применен следующий метод. Для ряда то чек через 10 м по дальности для заданного значения радиуса кривизны и уклона РСЗ на исходной точке были вычислены-зна чения уклонов. Расстояние до фотоприемника в процессе движе ния машины измерялось внутрибазовым дальномером типа ДВ-20. Изменение наклона луча прожектора производилось
204
вручную оператором направляющей станции. Среднеквадратич
ная ошибка отклонения фактического профиля от |
проектного |
составила 20 мм. |
|
На рис. V. 12, б приведены результаты разбивки |
плановой |
кривой радиуса 400 м. Для ведения рабочего'органа по духе пла новой кривой аналогично разбивке вертикальной кривой через каждые 10 м по дальности были вычислены поправки к проект ному значению уклона. По ходу движения машины внутрибазовым дальномером измерялось расстояние до фотоприемника, и оператор направляющей станции, непрерывно сопровождающий лучом фотоприемник, вводил поправку в наклон луча.
Для более полного представления о точности автоматическо го геодезического контроля в табл. V. 3 приведены результаты не которых других опытно-производственных работ с применением ПУЛ а
|
|
|
|
|
|
|
|
|
Т а б л и ц а |
V.3 |
|
|
Технические |
результаты точности геодезического |
контроля |
|
|||||||
|
|
|
|
|
|
|
|
Максимальные |
отклонения от |
||
|
|
|
|
|
|
Длина |
Среднеквад |
проектного |
профиля, |
мм |
|
|
Вид л работ |
|
|
|
ратичная |
|
|
|
|
||
|
|
|
|
объекта, м |
ошибка пла |
|
|
|
|
||
|
|
|
|
|
|
|
нировки, мм |
положитель |
отрицательные |
||
|
|
|
|
|
|
|
|
ные |
|
||
Плановая кривая |
|
радиуса |
308 |
± 2 3 |
48 |
|
44 |
|
|||
400 м с уклоном 20 |
(тысяч- |
|
|
|
|
|
|
||||
ЕС ых) |
|
кривая |
(вы |
300 |
20 |
38 |
|
28 |
|
||
Вертикальная |
/ |
|
|||||||||
пуклая) |
радиуса |
20 |
км |
550 |
|
|
|
27 |
|
||
Вертикальная.кривая |
(во |
18 |
30 |
|
|
||||||
гнутая) |
радиуса |
5 |
|
км |
|
|
|
|
|
26 |
|
Прямой участок |
с |
уклоном |
680 |
18 |
42 |
|
|
||||
6,4 (тыс.) |
|
|
|
|
|
|
|
|
51 |
|
|
Прямой участок |
с |
нулевым |
1000 |
20 |
40 |
|
|
||||
уклоном
Приведенные результаты показывают, что в автоматическом режиме достигается сравнительно высокая точность выравнива ния поверхности. Уменьшение количества проходов машины по вышает производительность труда и способствует повышению экономических показателей этого вида работ.
При анализе ошибок планировки поверхности следует иметь в виду, что ошибки складываются из ширины РСЗ по вертикали,
инерционности |
гидравлической |
системы, ошибок, |
вызываемых |
флуктуациями луча в воздухе |
и др. Целесообразную дальность |
||
действия ПУЛ а |
следует ограничивать допустимым |
значением |
|
систематической ошибки за кривизну Земли и рефракцию, так как автоматизация учета этой погрешности сопряжена со зна чительными техническими трудностями. По-видимому оптималь ная для ПУЛ а дальность действия составляет 300—400 м.
205
. Внедрение системы автоматики должно проходить в содру жестве конструкторов землеройных машин и геодезистов. Необ ходима разработка гидравлической системы, способной выдер живать многократные переключения с частотой до 10—15 пере ключений в минуту на спуск и подъем рабочего органа при весе последнего до 1 т.
§ V. 4. Применение лазеров для измерения деформаций сооружений и установки в створ технологического оборудования
Изучение деформаций сооружений, вызываемых осадками и горизонтальными смещениями, обычно осуществляется геодези ческими методами. Осадки сооружений (смещения в вертикаль ной плоскости) как правило определяют с помощью повторного высокоточного нивелирования. Для наблюдений за сдвигами (горизонтальными смещениями) обычно применяют створный метод. Под створными понимают геодезические измерения, вы полняемые с целью определения незначительных отклонений про межуточных точек от прямой, проходящей через два крайних (исходных) пункта, называемых опорными. Створные измерения применяются и для установки технологического оборудования в проектное положение. При этом относительно опорных точек в на туре производится разбивка и закрепление монтажных осей, ко торые могут совпадать с рабочими осями устанавливаемого тех нологического оборудования или быть параллельными им.
Монтажная ось представляет собой прямолинейный отрезок или систему жестко связанных по азимуту прямолинейных отрез ков, закрепленных в натуре опорными точками. При значительной длине монтажной оси путем створных наблюдений определяют ряд промежуточных точек, находящихся в одном створе с опор ными. Точность осуществления монтажной оси зависит от назна чения устанавливаемого технологического оборудования.
В некоторых случаях точность установки технологического оборудования на участке протяженностью 2—3 км должна сос тавлять десятые доли миллиметра (линейные ускорители элемен тарных частиц), следовательно, разбивка монтажных осей в на туре должна осуществляться в два-три раза точнее. Уникальные по точности створные измерения выполняются при создании уско рителен элементарных частиц, направляющих путей большого протяжения, специальных передающих антенн, автоматических поточных производственных линий и т. п. В дальнейшем, в период эксплуатации подобных сооружений должен осуществляться геодезический контроль за положением технологического обору дования.
Наиболее распространенные традиционные способы створных измерений — оптический и струнно-оптический. Однако в отдель-
206
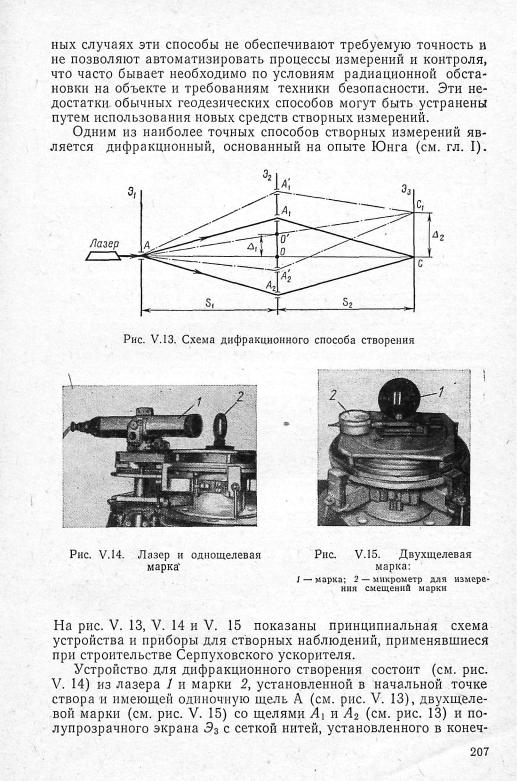

Созданы автоматические лазерные устройства для створных измерений, позволяющие производить измерения нестворностей при расстоянии около 1 км с погрешностью порядка 0,25 мм [V. 28]. Для уменьшения влияния «шума» излучение лазера мо дулируется.
Высокая точность, быстрота и дистанционное управление створными измерениями могут быть достигнуты при использова нии автоматического устройства, созданного на основе лазера, зонных пластин и следящего фотоэлектрического приемника. Та кое устройство используется в США для установки и контроля
положения 273 блоков |
магнитов Стенфордского |
ускорителя |
||
[V. 28]. Устройство (рис. V. 17) |
состоит из источника |
света — ге- |
||
лий-неоновного лазера /, |
зонных пластин 2 |
и фотодетектора 3. |
||
Створ, относительно которого |
производится |
определение смеще- |
||
S, |
|
S; |
|
|
Рис. |
V.17. Схема лазерного |
интерференционного |
|
|
|
створофиксатора: |
|
/ — лазер; |
2— зонные пластины; 3— |
фотодетектор; 4— конеч |
|
ная |
точка |
створа; 5 — поверяемый |
магнитный блок; 6 — на |
|
|
чальная точка |
створа |
ний оборудования ускорителя в плане и по высоте, проходит че рез центры зонных пластин, укрепленных на железобетонныз столбах в начальной- 6 и конечной 4 точках.
Для ослабления внешних условий световой луч проходит в трубе, в которой создан вакуум порядка 0,01 мм рт. ст. Контроль за положением блоков магнитов осуществляется автоматически на участке протяженностью 3 км. На каждом блоке 5, положение которого контролируется, шарнирно прикреплена зонная пласти
на, имеющая возможность |
устанавливаться |
вертикально, |
пере |
крывая световой пучок, или |
автоматически |
выводиться из |
него. |
Зонные пластины (см. рис. 1, 9) изготовлены из листов |
меди |
||
и покрыты никелем. Пластины имеют систему прямоугольных отверстий, расположенных таким образом, чтобы при их освеще нии лучом лазера в центре создаваемого ими изображения источ ника света освещенность возрастала, т. е. в плоскости изображе ния, совпадающего с плоскостью фотодетектора, происходило сложение световых колебаний.
209