

§ 2.3. Свойства фазосдвигающих элементов
Рассмотрим двигатель с двумя обмотками А и В, сдвинутыми в пространстве на 90 эл. градусов (рис. 2.5). Будем считать, что обмотки совершенно одинаковые, т.е. ZA = ZB (диаграмма токов для этого случая показана на рис. 2.6,а). Для того, чтобы образовалось вращающееся магнитное поле, необходим сдвиг токов во времени, поэтому в цепь обмотки В включим фазосдвигающий элемент Zфс.
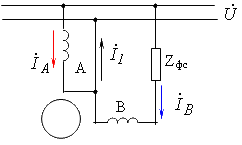
Рис. 2.5. К вопросу о свойствах фазосдвигающих элементов
Если использовать активное сопротивление (рис. 2.6,б), ток в фазе В уменьшится по величине, но станет более активным. Его вектор приблизится к вектору напряжения и между токами образуется временной сдвиг b. Если же использовать индуктивность (рис. 2.6,в), ток в фазе В тоже уменьшится по величине, но станет более реактивным. Его вектор отойдет от вектора напряжения и между токами опять образуется временной сдвиг b. В случае включения конденсатора, ток в фазе В станет опережающим (рис.2.6,г).
Анализ диаграмм токов на рис. 2.6 позволяет сделать вывод, что наилучшими фазосдвигающими свойствами обладает емкость. Только она обеспечивает сдвиг токов во времени на угол, близкий к 90º. К тому же она еще и улучшает сosφ двигателя.
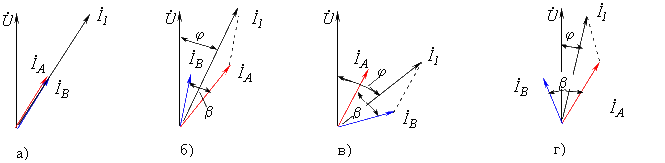
Рис. 2.6. Диаграммы токов двухфазного двигателя с различными фазосдвигающими элементами
Активное сопротивление и индуктивность сдвигают токи на угол, далеко не равный 90º. Кроме того, индуктивность ухудшает соsφ двигателя.
Задача 2.2. Определить угол между векторами токов в фазах А и В, если U = 220 В, ZA = ZB = 20 + j20 Ом и : а) Zфс = R = 20 Ом; б) Zфс = XL = j20 Ом; в) Zфс = Xс = -j20 Ом.
§ 2.4. Получение кругового поля в конденсаторном микродвигателе
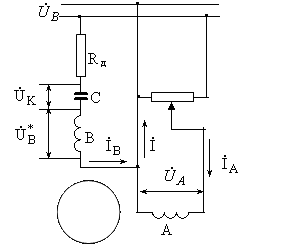
Рис.2.7. Схема включения конденсаторного двигателя (общий случай)
Рассмотрим двигатель с двумя обмотками А и В (рис.2.7). Последовательно с обмоткой В кроме конденсатора С включено добавочное сопротивление Rд , а главная обмотка питается от сети через делитель напряжения.
Необходимым условием получения кругового поля является равенство нулю одной из последовательностей токов, например, обратной
 (2.4)
(2.4)
Это значит, что
![]() (2.5)
(2.5)
Обозначим через коэффициент α отношение напряжения на обмотке А к напряжению сети UB: α = UA /UB
Раскрывая полные сопротивления ZB1 и ZA1 , получим
![]()
Используя (1.21), выразим параметры обмотки В через параметры обмотки А :
![]()
Комплексное число равно нулю, если равны нулю действительная и мнимая части:
 (2.7)
(2.7)
Таким образом, если одновременно выполнить условия (2.6) и (2.7), поле в двигателе станет круговым.
На практике круговое поле в конденсаторном двигателе получают одним из следующих способов:
1) подбором емкости конденсатора С и коэффициента трансформации k;
2) подбором емкости конденсатора С и соотношения фазных напряжений α ;
3) подбором емкости конденсатора С и добавочного сопротивления Rд .
Получение кругового поля подбором емкости конденсатора и коэффициента трансформации. При Rд = 0, α = 1 (рис. 2.8) уравнения (2.6), (2.7) принимают вид
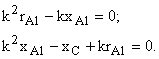
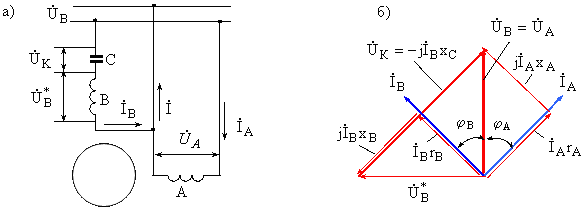
Рис.2.8. Схема включения (а) и векторная диаграмма (б) конденсаторного двигателя при Rд = 0 и α = 1
Решая первое уравнение системы (2.8), найдем коэффициент трансформации
![]()
где φA - угол между током и напряжением фазы А.
Решая второе уравнение системы (2.8), найдем емкостное сопротивление конденсатора
![]()
Или с учетом k = xA1 /rA1; k² xA1 = xB1
![]()
Зная xc , легко определить емкость конденсатора, мкФ
C = 106/(2πfxc).
Поскольку полные сопротивления rA1, xA1, xB1 зависят от скольжения, а коэффициент трансформации и емкость конденсатора должны иметь конкретные значения, круговое поле в двигателе будет иметь место лишь при определенном скольжении S. Таким скольжением чаще всего выбирают скольжение S = 1 или S = Sном. Во всех остальных режимах, т.е. при всех остальных скольжениях, поле в микродвигателе будет эллиптическим.
На рис. 2.8,б построена векторная диаграмма асинхронного конденсаторного двигателя при круговом поле, из которой можно определить рабочее напряжение конденсатора - второй, после емкости, важный параметр конденсатора
![]()
Получение кругового поля подбором емкости конденсатора и соотношения фазных напряжений

Рис.2.9. Схема включения конденсаторного двигателя при RД = 0 и α ≠ 1
В этом случае (рис. 2.9) уравнения (2.6), (2.7) принимают следующий вид

Решая систему (2.9), найдем

Получение кругового поля подбором емкости конденсатора и добавочного сопротивления

Рис.2.10. Схема включения конденсаторного двигателя при RД = 0 и α = 1
Схема включения показана на рис. 2.10. Уравнения (2.6), (2.7) принимают вид
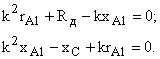
![]()
Откуда находим:
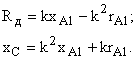
Данный способ имеет одно ограничение: разность kxA1 – k²rA1 должна быть > 0.
Необходимо еще раз подчеркнуть, что все три способа позволяют получить круговое поле только при одном скольжении. При всех других оно становится эллиптическим.