

Лекция 2 § 1.3. Частота вращения эллиптического поля
![]()
На рис. 1.2. показаны векторы прямо и обратно вращающихся НС (F1 и F2), а также вектор результирующей НС (FР) в различные моменты времени. Из рисунка видно, что большая ось эллипса равна удвоенной сумме, а малая ось удвоенной разности намагничивающих сил F1 и F2:
a= 2(F1 + F2); b = 2(F1 – F2).
Из последнего выражения легко увидеть, что при равенстве нулю одной из НС (F1 или F2), поле становится круговым, а при равенстве НС друг другу (F1 = F2) оно превращается в пульсирующее, т.е. эллипс вырождается в линию.
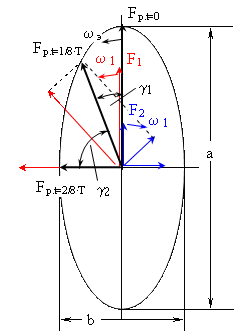
Рис. 1.2. К вопросу о частоте вращения эллиптического поля
Будем фиксировать через каждые 1/8·Т прямо и обратно вращающиеся НС F1 , F2 и их сумму Fp. За одно и то же время векторы F1 и F2 каждый раз будут поворачиваться на углы ± 45º, а их сумма Fp первый раз повернется на угол g1, второй раз на угол g2 и т.д. Из рис. 1.2 видно, что g1< g2, а поскольку временные отрезки одинаковые, это означает, что Fp вращается с переменной частотой.
Следовательно, эллиптическое магнитное поле вращается с переменной угловой частотой: большей возле малой оси эллипса и меньшей возле большой оси эллипса.
Исследованиями установлено [1], что
 (1.7)
(1.7)
где: k = (F1 – F2)/(F1+ F2) - коэффициент формы эллипса.

Рис. 1.3. Осциллограмма мгновенной скорости эллиптического поля.
Используя формулу (1.7), найдем максимальные и минимальные значения мгновенной скорости вращения эллиптического поля.
Если w1t = 0, то sin w1t = 0, cos w1t = 1, wэ = kw1, а поскольку коэффициент kменьше 1, wэ = min.
Если w1t = p/2, то sin w1t = 1, cos w1t = 0, wэ = w1/k, а поскольку коэффициент kменьше 1, wэ = max.
На рис. 1.3 показана осциллограмма мгновенной скорости вращения эллиптического поля.
Эллиптическое поле вызывает неодинаковое насыщение участков магнитной цепи (где поле больше, там и насыщение больше), неодинаковые потери в стали, неодинаковые нагревы этих участков, магнитострикционные шумы.
Задача 1.3. Определите во сколько раз ωэ.max и ωэ.min отличаются от синхронной ω1 , если F2 = 0,5F1?
§ 1.4. Получение кругового вращающегося магнитного поля в несимметричных двухфазных микромашинах
Эллиптическое магнитное поле станет круговым, если одна из составляющих, например F2, будет равна 0:
![]() (1.8)
(1.8)
Формула (1.8) справедлива, если:
FmA= FmB
cos(θ + β) = -1.
Отсюда вытекают два условия получения кругового магнитного поля в несимметричных двухфазных микромашинах:
амплитуды намагничивающих сил должны быть равны по величине, т.е. FmA = FmB = Fm;
сумма углов их пространственного и временного сдвига должна быть равна 180º , т. е. θ+β=180º.
Так как θ + β=180º , то в формуле (1.5) cos(θ - β) = - cos 2β или cos(β - θ) = - cos 2θ. Тогда величина круговой НС будет
 (1.9)
(1.9)
Анализ формулы (1.9) показывает, что магнитное поле хотя и круговое, но не максимальное, если углы θ и β каждый в отдельности не равен 90º.
Задача 1.4. Определить, во сколько раз величина круговой НС при θ = 100о и β = 80о отличается от значения при θ = β = 90о.
§ 1.5. Пусковые моменты несимметричных двухфазных микромашин
Известно, что пусковые моменты асинхронных и синхронных двигателей при асинхронном пуске пропорциональны квадрату фазного напряжения, т. е. Mn ~ U2.
Поскольку U ≈ E = 4,44·f·w·kоб·Фm , то при отсутствии насыщения магнитной цепи Ф ~ F, U ~ F, следовательно, Mn = c· (F1² - F2² ), где c - коэффициент пропорциональности.
![]()
Подставляя (1.5), (1.6) в последнее равенство, получим:
С учетом того, что
![]()
окончательно будем иметь:
![]() (1.10)
(1.10)
Следовательно, пусковой момент несимметричного двухфазного двигателя пропорционален произведению амплитуд намагничивающих сил и синусам углов их пространственного и временного сдвигов. Важно отметить, что максимум момента будет при θ = 90º и β = 90º.