

§ 2.8. Асинхронный двигатель с пусковым сопротивлением
Двигатель пускается как несимметричный двухфазный, а при достижении частоты вращения, близкой к номинальной, пусковая обмотка автоматически отключается (рис. 2.15).
Как и в двигателе с пусковым конденсатором, в этом двигателе рабочая обмотка занимает 2/3 пазов, пусковая - 1/3 пазов статора.
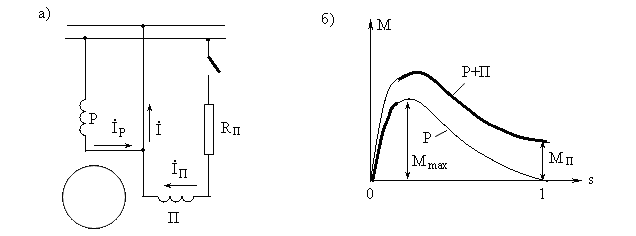
Рис.2.15. Схема включения (а) и механическая характеристика (б) асинхронного двигателя с пусковым сопротивлением
В целях увеличения временного сдвига токов, рабочую обмотку стремятся выполнить с большим числом витков проводом большого сечения, а пусковую обмотку - с небольшим числом витков проводом малого сечения. В результате xSР > xSП ; rSП > rSР . Иногда для уменьшения индуктивного сопротивления пусковой обмотки часть ее витковнаматывают бифилярно. Это еще больше усиливает разность xSП и xSР.
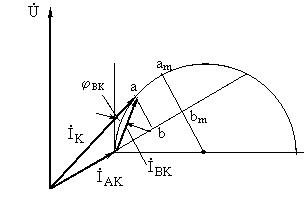
Рис.2.16. Круговая диаграмма пусковых токов асинхронного двигателя с пусковым сопротивлением
На рис. 2.16 приведена круговая диаграмма пусковых токов асинхронного двигателя с пусковым сопротивлением. Согласно (2.11) и здесь пусковой момент пропорционален отрезку ab
МП ~ ab.
Максимальный пусковой момент будет определяться отрезком ambm, поученным на линии, проведенной параллельно abчерез центр окружности
МП.max~ ambm.
Хотя при пуске поле эллиптическое, двигатель имеет сравнительно высокий пусковой момент (Мп /Мном = 1 - 1,5), что достигается значительным увеличением потока пусковой обмотки. Последнее получается за счет уменьшения ее числа витков Ф ≡ U/(4,44fwПkОП)
Энергетические показатели, как и любого однофазного двигателя, невысокие: КПД = 40 - 70 %; cosφ = 0,5 - 0,6; Mмах/Mном = 1,4 - 2.
Данные двигатели благодаря своей простоте и низкой стоимости широко применяются в холодильниках, стиральных машинах, вообще, там, где требуется кратковременная работа, или энергия, потребляемая в течение суток, сравнительно невелика.
§ 2.9. Асинхронный двигатель с экранированными полюсами
Асинхронный двигатель с экранированными полюсами (с короткозамкнутым витком) является широко распространенным двигателем в приводах, где не требуется большого пускового момента (Мп /Мном = 0,2 - 0,4), например, в магнитофонах, проигрывателях, вентиляторах и т.д.
Конструкция двигателя следующая (рис. 2.17,а). Статор, собираемый из тонких листов электротехнической стали, имеет явновыраженные полюса (2р = 2 или 4). Часть каждого полюса охватывается короткозамкнутым витком, выполняемым из толстой медной или алюминиевой шины. На полюсах располагается сосредоточенная однофазная обмотка возбуждения. Ротор всегда короткозамкнутый.
Принцип действия.
При питании обмотки возбуждения
переменным током возникает пульсирующий
магнитный поток
![]() B
(рис. 2.17,б), часть которого
B
(рис. 2.17,б), часть которого
![]() ’
проходит по неэкранированной части
полюса; другая -
’
проходит по неэкранированной части
полюса; другая -![]() ”
проходит по экранированной части полюса,
сцепляется с витком и наводит в нем ЭДС
”
проходит по экранированной части полюса,
сцепляется с витком и наводит в нем ЭДС![]() КЗВ.
Эта ЭДС отстает от потока экранированной
части
КЗВ.
Эта ЭДС отстает от потока экранированной
части
![]() ”
на угол 90 градусов (рис.2.17,в). Под действием
ЭДС
”
на угол 90 градусов (рис.2.17,в). Под действием
ЭДС![]() KЗВ
по витку протекает ток
KЗВ
по витку протекает ток
![]() KЗВ
и возникает поток витка
KЗВ
и возникает поток витка
![]() KЗВ,
который совместно с потоком
KЗВ,
который совместно с потоком
![]() ”
образует поток экранированной части
”
образует поток экранированной части![]() ЭК.
Из диаграммы видно, что поток экранированной
ЭК.
Из диаграммы видно, что поток экранированной
![]() ЭК
и поток неэкранированной части
ЭК
и поток неэкранированной части
![]() ’
сдвинуты во времени на угол β. К тому же
потоки
’
сдвинуты во времени на угол β. К тому же
потоки![]() ЭК
и
ЭК
и
![]() ’
сдвинуты в пространстве на угол θ(рис.
2.17,а). Таким образом, в двигателе имеются
два потока,сдвинутых в пространстве и
во времени. Этого достаточно, чтобы
дажепри сосредоточенной однофазной
обмотке в двигателе образовалосьвращающееся
магнитное поле. Поскольку углы β и θ
далеко не 90º, этополе эллиптическое.
’
сдвинуты в пространстве на угол θ(рис.
2.17,а). Таким образом, в двигателе имеются
два потока,сдвинутых в пространстве и
во времени. Этого достаточно, чтобы
дажепри сосредоточенной однофазной
обмотке в двигателе образовалосьвращающееся
магнитное поле. Поскольку углы β и θ
далеко не 90º, этополе эллиптическое.
Вращающееся поле статора индуцирует в роторе ЭДС и токи,которые, взаимодействуя с ним, создают вращающий момент.
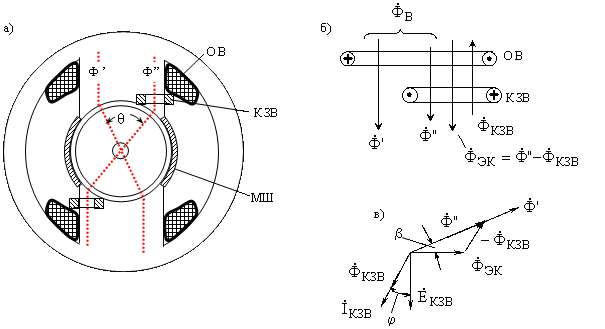
Рис. 2.17. Асинхронный двигатель с экранированными полюсами: а) – поперечный разрез (ОВ – обмотка возбуждения; КЗВ – короткозамкнутый виток; МШ – магнитный шунт); б) – схема потоков; в) – векторная диаграмма
![]()
![]()
Ток витка где WК – число витков короткозамкнутого витка, ZК – полное сопротивление витка, lК- коэффициент магнитной проводимости на пути потока пазового рассеяния витка. Поскольку активное сопротивление витка очень маленькое, ZК ≈ XК. В свою очередь
Тангенс угла между током витка и его ЭДС
![]()
Из векторной диаграммы,
следует, что для усиления "сдвигающего"
эффекта витка ток витка
![]() KЗВ
(поток
KЗВ
(поток
![]() KЗВ)
должен быть по возможности большим, а
угол φ - по возможности меньшим. Для того
чтобы выполнить оба эти требования,
виток должен быть действительно одним,
а укладывать его надо в открытый паз,
как имеющий наименьший коэффициент
магнитной проводимости рассеяния.
KЗВ)
должен быть по возможности большим, а
угол φ - по возможности меньшим. Для того
чтобы выполнить оба эти требования,
виток должен быть действительно одним,
а укладывать его надо в открытый паз,
как имеющий наименьший коэффициент
магнитной проводимости рассеяния.
Сосредоточенная обмотка возбуждения создает прямоугольную волнуНС, в которой сильно выражена 3-я гармоника (рис. 2.17,а). Эта гармоника образует свой вращающий момент, из-за чего в пусковой характеристике двигателя возникает глубокий провал (рис. 2.17, б). По этой причине вполневероятно застревание ротора при скорости вращения примерно равной1/3 синхронной.
Короткозамкнутый виток приводит к большим потерям мощности, поэтому КПД двигателя составляет всего 25 - 40 %. Его сosφ = 0,4 - 0,6.Большие потоки рассеяния обмотки ротора, которые замыкаются черезполюсные наконечники, приводят к большим индуктивным сопротивлениямэтой обмотки, поэтому кратность пускового тока двигателя весьма небольшая (Iп/Iном = 1,2 - 1,5).
Следствием всего вышесказанного является высокая надежность двигателя с экранированными полюсами. Главный недостаток двигателя заключается в его нереверсивности. Ротор всегда вращается в сторону витка.
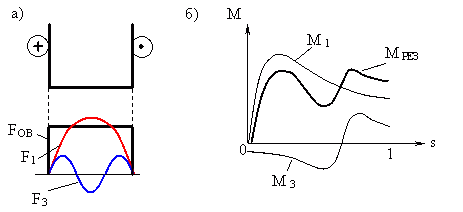
Рис. 2.18. Намагничивающая сила сосредоточенной обмотки возбуждения и ее гармонические составляющие (а); механическая характеристика двигателя (б)
В последнее время у нас в стране и за рубежом начинают выпускать двигатели с несколькими витками, вообще без витков, но с неравномерным воздушным зазором (рис. 2.18). Однако, несмотря на все усовершенствования, пусковые и рабочие свойства двигателей остаются невысокими.
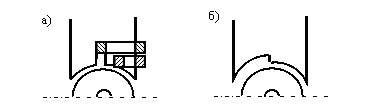
Рис. 2.19. Асинхронные двигатели с несколькими витками (а) и с неравномерным воздушным зазором (б)
Задания:
Предложите конструкцию реверсивного двигателя с экранированным и полюсами.
Предложите способы уменьшения провала в пусковой характеристике рассмотренного двигателя.