

Лекция 7 3. Синхронные микродвигатели
![]()
Характерной особенностью синхронных микродвигателей (СМД)является постоянство частоты вращения при неизменной частоте питающейсети и колебаниях момента нагрузки на валу и напряжения сети вопределенных пределах, поскольку
np = n1 = 60f/p.
Статор СМД по конструкции очень похож на статор обычной машины переменного тока, т.е. состоит из сердечника и трех- или двухфазной обмотки, создающей вращающееся магнитное поле. Однако в отличие от машин средней и большой мощности СМД практически никогда не выполняются с обмоткой возбуждения на роторе. В зависимости от конструкции ротора они бывают: с постоянными магнитами, реактивные, гистерезисные.
§ 3.1. Синхронные микродвигатели с постоянными магнитами
По способу пуска эти двигатели делятся: 1) на самозапускающиеся двигатели; 2) двигатели с асинхронным пуском.
Самозапускающиеся двигателивыполняются на небольшие мощности (обычно доли ватта) и низкие частоты вращения (не более 400 об/мин). Они рассчитываются на работу от однофазной сети переменного тока. Их магнитное поле либо пульсирует, либо имеет резко выраженный эллиптический характер. Пуск этих двигателей происходит за полпериода изменения тока за счет всегда существующего в синхронных двигателях пульсирующего момента. Нагрузка должна быть малоинерционной. В противном случае они пускаются в холостую а затем нагружаются. Для пуска используются различные устройства, обеспечивающие вращение двигателя в заданном направлении.
Обычно они выполняются плоскими – имеющими сравнительно большой диаметр и малую длину. Их обмотка возбуждения имеет вид кольца, а магнитная цепь статора - клювообразные полюса. КПД таких двигателей невелик – 3÷5 % и менее.
Синхронные микродвигатели с асинхронным пускомимеют на роторе короткозамкнутую обмотку типа "беличьей клетки", которая выполняется в полюсных наконечниках. Эта обмотка во время пуска участвует в создании асинхронного момента и разгоняет двигатель до скорости, близкой к синхронной. В синхронном режиме она демпфирует колебания ротора при резких изменениях нагрузки.
СМД с постоянными магнитами и асинхронным пуском изготавливаются в двух исполнениях: с радиальным расположением постоянных магнитов (рис. 3.1,а); с аксиальным расположением постоянных магнитов (рис. 3.1,б).
В электромагнитном отношении более совершенны двигатели первого исполнения. Второе применяется в тех случаях, когда есть ограничения по внешнему диаметру.
Уравнение ЭДС и момент двигателя в синхронном режиме. Из общего курса электрических машин известно несколько форм уравнения напряжения синхронного двигателя с явновыраженными возбужденными полюсами, например такая:
![]() (3.1)
(3.1)
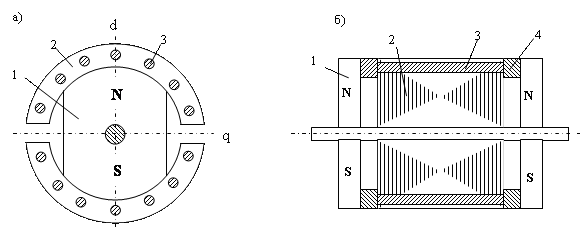
Рис. 3.1. Синхронные микродвигатели с постоянными магнитами на роторе с радиальным (а) и аксиальным (б) расположением магнитов. 1 – постоянный магнит; 2 – сердечник из электротехнической стали; 3 – стержни пусковой обмотки; 4 – короткозамыкающие кольца.
где:
![]() 0
- ЭДС, индуцированная в статоре полем
ротора;
0
- ЭДС, индуцированная в статоре полем
ротора;
![]() d
,
d
,
![]() q
- ток статора по осям d и q; xd,
xq -
синхронные индуктивные сопротивления
статора по продольной и поперечной
осям; r1
- активное сопротивление статора.
q
- ток статора по осям d и q; xd,
xq -
синхронные индуктивные сопротивления
статора по продольной и поперечной
осям; r1
- активное сопротивление статора.
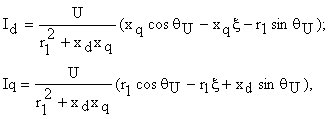
Уравнению (3.1) соответствует векторная диаграмма нарис. 3.2. Из диаграммы можно вывести выражения токов Idи Iq
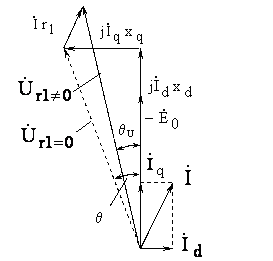
Рис. 3.2. Векторная диаграмма СМД.
![]() где
- степень возбужденности ротора.
где
- степень возбужденности ротора.
Полный ток статора
![]()
Если пренебречь активным сопротивлением статора (r1 = 0), формула момента
 (3.2)
(3.2)
Вращающий момент двигателя является суммой двух моментов: электромагнитного М1, обусловленного взаимодействием полей статора и ротора и реактивного момента М2 , обусловленного неодинаковой проводимостью по продольной и поперечной осям.
Не учет активного сопротивления статора в микромашинах приводит к значительным количественным ошибкам. Вместе с тем его учет сильно усложняет математический анализ процессов, происходящих в машине /см. [1], формула(4.24)/. Однако и в этом случае формула момента похожа на (3.2)
![]() (3.2')
(3.2')
где: AЭ - амплитуда электромагнитного момента с учетом r1; Adq - амплитуда реактивного момента с учетом r1; αЭ, αdq - углы сдвига первой и второй составляющих момента; MТ - тормозной момент.
Рассматривая выражение (3.2'), приходим к выводу, что вращающий момент синхронного микродвигателя с учетом r1 , так же как и без учета r1, является суммой двух синусоид, только смещенных влево на углы αЭ и αdq и вниз на величину тормозного момента МТ.
Смещение синусоид влево (в сторону меньших углов) можно пояснить с помощью векторной диаграммы рис. 3.2, на которой пунктиром показан вектор напряжения, замыкающий диаграмму, и угол q при r1 = 0. Из диаграммы видно, что учет активного сопротивления приводит к уменьшению угла между векторами ЭДС и напряжения сети. Это дает основание утверждать, что момент наступает при меньшем угле. Смещение синусоид вниз объясняется потерями в обмотке статора, которые бы не учитывались при r1 = 0, следовательно, меньшей полезной мощностью, а значит и меньшим моментом двигателя.
Двигатели с радиальным расположением магнитов.Роль обмотки возбуждения здесь выполняет блок постоянных магнитов типа звездочки, на который напрессован кольцевой пакет из электротехнической стали. В пазах кольца располагается пусковая короткозамкнутая обмотка и имеются прорези, размеры которых выбираются из условия хорошего пуска и максимального использования энергии постоянных магнитов в синхронном режиме.
Свойства двигателя во многом зависят от того, насколько удачно выбраны размеры этих прорезей. В целях предохранения магнитов от размагничивания и увеличения асинхронного пускового момента прорези должны быть минимальными. Однако не следует забывать о том, что это приводит к росту потоков рассеяния и ухудшению свойств двигателя в синхронном режиме.
Особенностью двигателей радиальной конструкции является большое магнитное сопротивление по продольной оси по сравнению с сопротивлением по поперечной оси. Объясняется это низкой проводимостью постоянного магнита, по которому проходит поток продольной реакции якоря (проводимость магнита лишь раз в 10 больше проводимости воздуха, тогда как проводимость электротехнической стали в тысячи раз превышает ее).
Поток поперечной реакции якоря проходит по полюсным наконечникам из электротехнической стали и, естественно, встречает малое магнитное сопротивление. Поэтому в данных двигателях ld < lq, а следовательно xd < xq. Тот факт, что xd < xqприводит к иному виду угловой характеристики, чем в двигателя «классической» конструкции (рис.3.3).
|
Стабилизация магнитовв этих двигателях происходит в режиме противовключения, что имеет место при частоте вращения, близкой к синхронной. |
(Стабилизацией постоянного магнита называется воздействие на него внешней размагничивающей силой такой величины, больше которой в практике эксплуатации двигателя не встретится.) |
В двигателях аксиальной конструкции магнитные сопротивления по продольной и поперечной осям практически одинаковы, т.е. xd≈ xq, поэтому их можно рассматривать как машины с неявновыраженными полюсами. Стабилизация магнитов в этих машинах происходит в режиме короткого замыкания.

Рис. 3.3. Зависимости моментов от угла &teta; при xd < xq (а) и при xd > xq (б).
Положительными свойствами синхронных двигателей с постоянными магнитами являются: высокая стабильность скорости вращения в синхронном режиме, сравнительно высокие энергетические показатели (КПД и cosj), повышенная перегрузочная способность, большая удельная мощность (мощность на единицу массы), хорошая синфазность вращения, что часто требуется в групповых приводах. Недостатки – более высокая стоимость, меньший пусковой момент и больший пусковой ток по сравнению с аналогичными реактивными двигателями.