

§ 5.3 Работа сельсинов в индикаторном режиме
Схема индикаторной связи приведена на рис. 5.4. Будем считать, что оба сельсина совершенно одинаковы и от одного датчика питается только один приемник.

Рис. 5.4. Индикаторная схема «передачи угла»
При питании обмоток возбуждения датчика и приемника переменным током возникают пульсирующие потоки возбуждения Фвд и Фвп, которые индуцируют в обмотках синхронизации ЭДС (Ед1,..., Еп3). Величина каждой ЭДС зависит от углового положения соответствующей обмотки относительно оси поля возбуждения. Если принять гармонический закон распределения индукции магнитного поля, то:

Здесь Еm-максимальное значение ЭДС, которое получается при соосном положении обмотки синхронизации и обмотки возбуждения. Из рис. 5.4 видно, что в любой момент времени ЭДС одноименных фаз датчика и приемника направлены встречно. Если сельсины находятся в согласованном положении, ЭДС одноименных фаз датчика и приемника равны по величине и уравновешивают друга.
При повороте датчика на угол aд равенство ЭДС нарушается. По обмоткам синхронизации и линиям связи протекают токи, которые, взаимодействуя с потоками возбуждения, создают моменты, в равной мере действующие на вал датчика и приемника. Поскольку датчик обычно фиксируется, приемник будет поворачиваться в ту же сторону и на такой же угол, ибо только при согласованном положении ЭДС вновь будут уравновешивать друг друга.
Найдем выражение синхронизирующего момента сельсинов.
Так как одноименные фазы датчика и приемника соединены встречно, то проходящий по ним ток:

где Zф-полное сопротивление обмотки синхронизации одного из сельсинов плюс половина сопротивления линии связи.
Подставляя значения ЭДС, учитывая, что

и обозначая разность углов поворота датчика и приемника aд-aпчерез угол рассогласования q, получим

Если один из сельсинов зафиксировать, а другой поворачивать на угол от 00 до 3600, то зависимость токов от угла рассогласования будет иметь вид, показанный на рис.5.5. Из формул токов и рис. 5.5 видно, что при любом угле рассогласования сельсинов сумма токов равна нулю. Поэтому в линиях связи отсутствует нулевой провод.

Рис.5.5. Зависимость токов в обмотках синхронизации в функции угла рассогласования
Лекция 25 мдс ротора
![]()
Токи, протекая по обмоткам синхронизации, создают намагничивающие силы (НС) отдельных фаз, например F1 = 1,8I1W2kO (на пару полюсов). Эти силы складываясь, образуют результирующие НС датчика и приемника.
Найдем их проекции на оси d и q. Например, для приемника это будет (рис. 5.6)
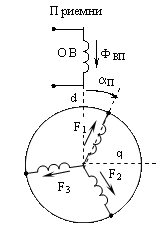
Рис. 5.6. Составляющие НС приемника
После подстановки значений НС и преобразований, получим:
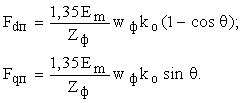
Продольная составляющая НС Fdп направлена встречно потоку возбуждения и пытается размагнитить сельсин. Однако ее действие компенсируется увеличением тока возбуждения так, что при малых углах рассогласования, при которых обычно и работают сельсины, ею можно пренебречь.
К тому же, значение Fdп много меньше Fqп. Например, при q = 50 Fdп/Fqп = 0, 026.
Поперечная составляющая НС Fqп, взаимодействуя с потоком обмотки возбуждения Фвп, создает вращающий момент, который можно определить подобно тому, как это делается для асинхронного двигателя.
![]()
Здесь Y- угол сдвига во времени между потоком возбуждения и током ротора (рис. 5.7). С учетом cosY = - sinj2, опуская знак минус, получим
![]() (5.1)
(5.1)
Подставляя значение Fqп в (5.1), получим
 (5.2)
(5.2)
где Мm - максимальный синхронизирующий момент

Формула (5.2) показывает гармоническую зависимость момента синхронизации от угла рассогласования и, казалось бы, что сельсин имеет два устойчивых положения: при q = 00 и q = 1800. Однако положение при q = 1800 - положение неустойчивого равновесия. Достаточно малейшего возмущения, чтобы сельсин из положения q = 1800 перешел в положение q= 00. Аналогом этому может служить модель, состоящая из двух магнитов (рис. 5.8).

Гармоническая зависимость (5.2) справедлива только при малых углах рассогласования q (порядка 100 ÷ 150). При больших углах необходимо учитывать размагничивающее действие продольной составляющей результирующей НС обмоток синхронизации Fd, соотношения индуктивных сопротивлений обмоток по продольной - хd и поперечной - хq осям и ряд других факторов.
На рис. 5.9 даны характерные графики Мc = f(q) для сельсина неявнополюсной (1) и явнополюсной (2) конструкции. В первой из них xd= xq во второй xd > xq.