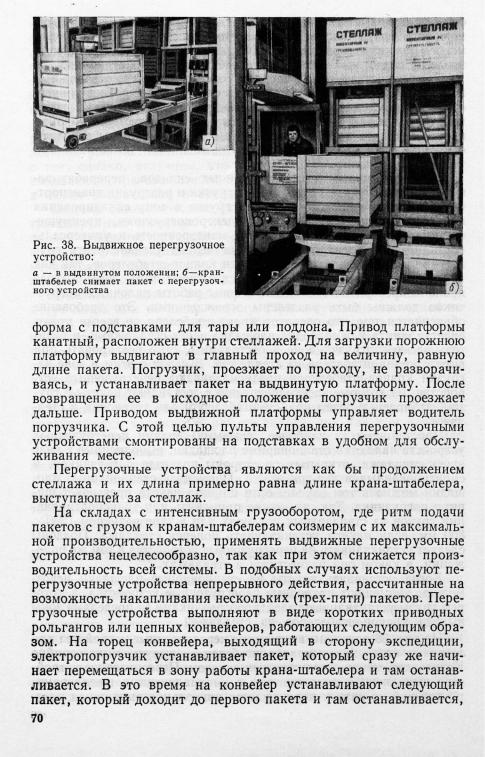
книги из ГПНТБ / Зерцалов, А. И. Краны-штабелеры
.pdfтором. При установке на кране-штабелере двух телескопических захватов, располагаемых один над другим, описанное конструк тивное решение уже нецелесообразно, так как верхний контейнер располагается слишком высоко, закрывая оператору обзор, и пере кладка грузов из одного контейнер в другой затруднена.
В описываемом кране-штабелере грузоподъемник и кабина вы полнены так, что они поднимаются совместно при таком взаимном расположении, которое наиболее удобно для перекладки грузов из одного контейнера в другой, как это показано на рис. 34, а.
На верху кабина останавливается и грузоподъемник поднимается еще на 800 мм для обслуживания верхних рядов стеллажей (рис. 34, б). Конструктивно это обеспечивается следующим обра зом. На консольном грузоподъемнике 5 (рис. 34, б) установлены один над другим два телескопических захвата 2 и 3 и кабина опе ратора 1. Последняя может перемещаться относительно грузоподъ емника по установленным на нем каткам 4. В верхней части кабины имеется шарнир 12, на котором установлен рычаг 10 с отогнутым нижним концом. На нижнем конце рычага размещены ролики 8 и 9. Ролик 9 упирается в стенку грузоподъемника 6, ролик 8 ка тится по колонне И. Грузоподъемник подвешен на грузовом ка нате с помощью блока 7. При подъеме грузоподъемника его стенка 6 упирается в ролик 9 рычага, который не может повернуться, так как его второй ролик 8 катится по колонне. Таким образом кабина, поддерживаемая рычагом 10, поднимается вместе с грузоподъем
ником.
В верхней части колонны расположен карман 13, в который
входит (под действием горизонтальной составляющей реакции опоры ролика 9) рычаг 10. При этом ролик 9 выходит из зацепления со стенкой грузоподъемника 6, которая при дальнейшем подъеме
Рис. 34. Положения грузоподъемника и кабины стеллажного комплектовочного крана-штабелера грузоподъемностью 2 X 0,25 т:
а «л рабочее; б — при обслуживании верхних ячеек стеллажей
61
грузоподъемника катится по ролику 9 рычага, запирая его в кар мане 13. Грузоподъемник может подниматься, в то время как
кабина оператора остается неподвижной, будучи подвешенной на рычаге 10. При опускании грузоподъемника работа механизма
происходит в обратной последовательности.
Кран-штабелер выпускается в двух исполнениях: с двумя теле скопическими захватами для грузов массой 250 кг и с одним теле скопическим захватом грузоподъемностью 500 кг.
Поштучный отбор грузов, хранящихся в таре или на поддонах с размерами в плане 1200x800 мм (или близких к ним), произво дится, как правило, на двухколонных кранах-штабелерах, грузо подъемность которых не менее 2 х 1,0 т. На грузоподъемнике предусмотрены два выдвижных телескопических захвата, между которыми расположено рабочее место оператора. При комплекто вании заказов на один из телескопических захватов устанавли вается порожний контейнер или поддон, другой захват служит для извлечения из стеллажа пакетов с требуемыми грузами. Краныштабелеры рассматриваемого типа наряду с комплектованием зака зов могут перерабатывать грузы целыми пакетами, одновременно перевозя по два поддона.
Установка двух телескопических захватов на грузоподъемнике влечет за собой увеличение его размеров и массы и, как следствие, возрастание мощности привода подъема, а также размеров и массы крана-штабелера в целом. Это обстоятельство ограничивает об ласть применения подобных кранов.
Описанные стеллажные краны-штабелеры могут выполняться для продольного и поперечного расположения поддонов на стелла жах. Более удобны для комплектования краны-штабелеры с попе речным расположением поддонов, эксплуатирующиеся в проходах шириной 1,3— 1,4 м и позволяющие оператору легко переносить из одного поддона в другой грузы относительно больших размеров.
Тяжелые комплектовочные краны-штабелеры могут быть обо рудованы одним выдвижным телескопическим захватом. В этом случае грузы комплектуют на передвижные тележки, размещаемые на полу кабины оператора, которая выполняется достаточно боль ших размеров.
КРАНЫ-ШТАБЕЛЕРЫ
ДЛЯ ПАКЕТНОЙ ПЕРЕРАБОТКИ ГРУЗОВ
Основная часть общего складского грузооборота, перерабаты ваемого кранами-штабелерамй, приходится на пакетированные грузы, хранящиеся на складе и выдаваемые потребителям целыми пакетами. Для переработки пакетированных грузов используют стеллажные краны-штабелеры описанных типов, оборудованные грузовыми захватами, предназначенными для работы с ящичной тарой или поддонами, имеющими приспособления для установки в штабеля или стеллажи.
62
На стеллажных кранах-штабелерах применяют выдвижные ви лочные или телескопические грузовые захваты. Вилочные захваты представляют собой две вилы, укрепленные на выдвижной каретке, передвигающейся по направляющей траверсе. Последняя может поворачиваться на 180° в горизонтальной плоскости с целью об служивания двух стеллажей, расположенных по обе стороны меж стеллажного прохода. Конструкция выдвижных вилочных захва тов аналогична захватам, применяемым на мостовых кранах-шта белерах.
Вилочные захваты позволяют работать с двухнастильными стандартными поддонами при минимальных потерях по высоте, так как вилы можно вводить в окна поддонов. К недостаткам таких захватов следует отнести увеличение ширины прохода между стел лажами на величину, определяемую размером каретки вилочного захвата.
Более экономичны выдвижные телескопические захваты. Они обычно состоят из трех секций: неподвижной, промежуточной и выдвижной. Последняя служит опорной площадкой для установки груза. Она расположена несколько выше остальных секций, чтобы при выдвижении груз не задевал за неподвижную и промежуточную секции. Промежуточная секция имеет ролики, благодаря которым она может передвигаться по направляющим неподвижной секции. В свою очередь, выдвижная секция с помощью роликов движется по промежуточной секции. Ширина всех секций одинакова и равна максимальной ширине перевозимого груза.
Промежуточная секция выдвигается примерно на половину ее длины; выдвижная секция выступает из промежуточной на ту же величину. Обе секции выдвигаются одновременно с помощью при вода. Захват может выдвигаться в обе стороны прохода. Таким образом, взятый из загрузочного устройства груз может быть уста новлен в любую сторону без какого-либо поворота грузового захвата. Благодаря этому ширина прохода между стеллажами может быть снижена до минимального размера, определяемого шириной перевозимого груза с учетом необходимых зазоров между грузом и стеллажами.
На рис. 35 показаны схемы выдвижных телескопических захва тов, получивших наибольшее распространение. На рис. 35, а
изображен захват с вертикальным расположением секций. Он состоит из выдвижной площадки 3 с закрепленной на ней ролико вой батареей 5 и 6, промежуточного элемента 2, неподвижной ро ликовой батареи 1 и 7 и приводного вала с шестернями 8. Захваты
такого типа относительно просты в изготовлении и технологичны. Недостатком является некоторое увеличение высоты промежуточ ной секции (не влекущее, впрочем, за собой никаких изменений в конструкции тары или стеллажей).
На рис. 35, б показан другой тип выдвижного телескопического
захвата, отличающийся горизонтальным расположением секций. Захват выполнен так. На неподвижной секции, установленной на
63
грузоподъемнике, крепятся ролики 9, по которым перемещается промежуточный элемент 2, несущий на себе ролики, 8, служащие для передвижения выдвижной площадки 3. На валу промежуточ
ного элемента смонтирована шестерня, входящая одновременно в зацепление с зубчатой рейкой, имеющейся на выдвижной секции, и зубчатой рейкой, закрепленной на неподвижной секции захвата. Привод захвата состоит из электродвигателя, редуктора и тормоза. На выходном валу редуктора размещена шестерня, входящая в за цепление с шестерней приводного вала захвата, имеющего также две шестерни, сопряженные с зубчатыми рейками, установленными на промежуточном элементе захвата.
Работает захват так. При включении привода шестерни посред ством зубчатых реек сообщают поступательное движение промежу точному элементу 2. Расположенная на последнем шестерня, дви
жущаяся вместе с промежуточным элементом, входит в зацепление с неподвижной зубчатой рейкой и передает движение с удвоенной скоростью зубчатой рейке, установленной на выдвижной секции захвата. Таким образом, промежуточный и выдвижной элементы захвата движутся одновременно, но выдвижной элемент переме щается вдвое быстрее первого.
Телескопические захваты выполняют одинарными или сдвоен ными, работающими от одного привода. На рис. 36 показан сдвоен ный выдвижной телескопический захват грузоподъемностью 1,0 т, применяемый на серийных стеллажных кранах-штабелерах Кадиевского машиностроительного завода для переработки пакетирован-
Рис. 35. Схемы телескопических выдвижных захватов с расположением секций:
а — вертикальным: б — горизонтальным
64

управлением, а стеллажные краны-штабелеры, используемые на крупных специализированных складах, как правило, имеют автоматическое управление.
Функциональные и конструктивные особенности стеллажных кранов-штабелеров позволяют осуществить автоматизацию их управления с большим экономическим эффектом. Рассматривае мые краны являются специализированными грузоподъемными машинами, перерабатывающими однородные по способу и разме рам упаковки грузы в пределах склада в целом или секции склада, состоящего из нескольких стеллажей, и выполняющими однород ные операции по установке грузов в стеллажи и выдаче их из них. Однородность операций позволяет снизить число команд, выпол няемых кранами-штабелерами до двух: взять или положить груз.
Положение груза в стеллажах, обслуживаемых кранамиштабелерами, определяется двумя координатами, соответству ющими номерам вертикального и горизонтального рядов стел лажей, а также номеру одного из двух стеллажей, между кото рыми движется кран.
Благодаря жесткости системы абсолютные и относительные деформации металлоконструкций стеллажных кранов-штабелеров значительно меньше, чем мостовых кранов, и меньше зависят от положения грузового захвата на кране.
Минимальное число команд, выполняемых краном, малый объем информации, необходимый для выполнения этих команд,
ижесткость всей системы позволяют создавать достаточно простые
инадежные системы автоматического управления стеллажными кранами-штабелерами.
Различают следующие основные группы систем автоматиче ского управления, предусматривающие управление работой: а) нескольких кранов-штабелеров; б) кранами-штабелерами и транспортными линиями загрузки и разгрузки кранов-штабеле ров; в) кранами-штабелерами и транспортными линиями, работа ющими в общей системе АСУ склада.
Автоматическое управление группой кранов-штабелеров, не
объединенных |
общими |
транспортными |
системами, применяется |
на небольших |
складах |
или на участках |
универсальных складов |
с целью облегчить условия и повысить производительность труда обслуживающего персонала. В подобных системах загрузка кранов-штабелеров производится механизмами циклического дей ствия, электропогрузчиками, мостовыми кранами, электроталями. Пульты управления устанавливаются в непосредственной близости от крана-штабелера. Оператор наблюдает за установкой груза на загрузочной площадке и задает команду на установку груза в стеллаж. После выполнения команды крану-штабелеру задают следующую команду и т. д. Производительность подобных систем ограничивается возможностями операторов, которые должны вести контроль за прибывшими и вывозимыми грузами и управлять работой кранов-штабелеров.
66
Значительно более производительны и эффективны складские системы, применяемые на крупных специализированных складах и включающие группу кранов-штабелеров, объединенных единой транспортной линией. Как правило, подача грузов к кранамштабелерам и вывоз грузов из отделения хранения в экспедицию отправки осуществляются двумя раздельными транспортными линиями непрерывного действия, расположенными с одного торца стеллажей, но на разных уровнях, или с противоположных тор цов стеллажей.
Транспортная линия подачи грузов представляет собой ро ликовый, пластинчатый или тележечный конвейер (рис. 37), на который устанавливаются пакетированные грузы в таре или на поддонах. Груз проходит мимо центрального пульта управления, где оператор проверяет его и вводит в систему автоматического управления информацию, включающую код операции по уста-
5* |
67 |
новке груза и координаты его места расположения (в зависимости |
|
от назначения и исполнения системы могут вводиться и другие |
|
сведения). Далее пакет с грузом следует по конвейеру, где произ |
|
водится автоматическая проверка его размеров и массы. При |
|
соответствии сформированного пакета техническим требованиям |
|
он транспортируется вдоль ряда кранов-штабелеров до заданного |
|
крана, где перегрузочное устройство снимает его с конвейера и |
|
устанавливает на загрузочную площадку. Кран-штабелер заби |
|
рает груз и устанавливает в требуемую ячейку стеллажа. Ана |
|
логично работают линии выдачи грузов в экспедицию отправки |
|
с тем, однако, отличием, что на этих линиях собирают грузы, |
|
выдаваемые кранами-штабелерами, и |
затем они следуют далее |
в одном направлении в экспедицию |
отправки. |
Система автоматического управления кранами-штабелерами и транспортными линиями осуществляет управление электропри водами транспортирующих механизмов, контроль положения груза при его движении, а также обратную связь исполнительных механизмов с центральным пультом управления, фиксирующую выполнение заданных команд.
Стеллажные краны-штабелеры с автоматическим управлением могут иметь или не иметь кабину. При отсутствии последней не только уменьшается стоимость изготовления крана-штабелера, но и упрощается конструкция привода подъема, так как не тре буется устанавливать ловители грузоподъемника и увеличивать запас прочности грузовых канатов. Кроме того, при отсутствии кабины лучше используется высота склада.
Однако практика показывает, что с установкой кабины, обо рудованной приборами для ручного управления, существенно увеличивается надежность работы склада, так как при неполад ках в системе автоматического управления работа на складе может продолжаться. Кабина управления необходима также для наладки крана-штабелера при пуске склада в эксплуатацию.
В ответственных складских системах обычно предусматри вают, наряду с автоматическим управлением, кабины для опера торов, снабженные приборами для ручного управления механиз мами крана-штабелера.
ВСПОМОГАТЕЛЬНОЕ ОБОРУДОВАНИЕ СКЛАДОВ
Стеллажные краны-штабелеры являются специализированными грузоподъемными машинами и предназначены для выполнения лишь одной функции — устанавливать грузы в стеллажи и выда вать их из последних. При специализации кранов-штабелеров на выполнении только этих операций достигается положительный эффект при складировании грузов благодаря компактной укладке их и минимальным размерам межстеллажных проходов. Умень шение межстеллажных проходов и зазоров получено путем огра ничения количества степеней свободы стеллажных кранов-шта-
68
белеров и применения телескопических захватов, имеющих воз можность брать пакеты с грузом только снизу в пространстве между ножками тары или между подставками, на которые уста новлены поддоны. В стеллажах подставками служат полки.
Преимущества, обусловленные специализацией стеллажных кранов, достигнуты прежде всего за счет уменьшения их универ сальности. Стеллажными кранами-штабелерами нельзя вести погрузку или разгрузку транспортных средств и доставлять грузы из экспедиции в зону хранения. Поэтому такие краны работают совместно с другими грузоподъемными машинами, выполняющими указанные функции.
На большинстве механизированных складов, перерабатыва ющих тарно-штучные грузы, для погрузки и разгрузки транспорт ных средств и транспортирования грузов в зону складирования применяют напольные авто- и электропогрузчики, преимуще ствами которых являются высокая маневренность и универсаль ность. Однако электропогрузчиками нельзя устанавливать груз непосредственно на грузоподъемники кранов-штабелеров, так как их производительность уменьшается. Кроме того, зоны выхода крана-штабелера из стеллажей и зоны работы вилочных погруз чиков должны быть разделены ограждениями. Это требование объясняется тем, что оператор крана-штабелера не всегда может видеть, занята или свободна площадка перед стеллажами, и води тель электропогрузчика не в состоянии быстро реагировать при выезде крана-штабелера из стеллажей. В связи с этим в зоне за грузки кранов-штабелеров предусматривают перегрузочные уст ройства, на которые электропогрузчики доставляют пакеты с гру зом, забираемые затем краном-штабелером для установки в стел лажи.
Простейшими (и наиболее дешевыми) видами перегрузочных устройств являются стационарные площадки, выполненные в виде ячеек стеллажа, открытых со стороны подъезда погрузчиков, и смонтированных в два-три этажа. Применять стационарные пло щадки можно в том случае, если ширина пакета превышает ши рину погрузчика. Так, их можно применять при транспортирова нии грузов на стандартных поддонах или в таре размером 1200 X 800 мм, если пакеты устанавливать поперек стеллажа. Поддоны следует устанавливать на перегрузочные устройства в том же поло жении, в каком они разместятся в стеллажах.
Когда установить пакеты на стационарные площадки невоз можно, применяют приводные перегрузочные устройства, в кото рые грузы устанавливают электропогрузчиками за пределами зоны выхода кранов-штабелеров из стеллажей.
На рис. 38 показаны выдвижные перегрузочные устройства для загрузки стеллажных кранов-штабелеров, выпускаемых серийно Кадиевским машиностроительным заводом. Перегрузочное устрой ство выполнено в виде станины с направляющими швеллерами, но которой на катках перемещается консольная выдвижная плат-
69