

1.3.3. Робота та кінетична енергія
Кількість енергії, яку людство одержує з надр Землі у формах, які є зручними для сучасного промислового виробництва, має свою межу, до якої вже недалеко. Добробут людства безпосередньо пов`язано із споживанням енергії. Об`єми валових національних продуктів є приблизно пропорційними до величини споживаної енергії. Виробництво та розподіл енергії за умов обмежених ресурсів та ажіотажного попиту становить соціальну, економічну та політичну проблему. Але фізика опікується іншими аспектами питань енергії.
Коли
сила діє на рухому матеріальну точку,
то вона виконує роботу над нею. Робота
вимірюється в Джоулях:
![]()
![]() в системі СІ або в ергах:
в системі СІ або в ергах:![]()
![]() в системі СГС. Кількісно елементарна
робота, що її виконує сила
в системі СГС. Кількісно елементарна
робота, що її виконує сила![]() при переміщенні на
при переміщенні на![]() ,
це добуток
,
це добуток
![]() .
Коли матеріальна точка рухається вздовж
криволінійної траєкторії під дією
змінної сили, долаючи шлях скінченної
величини, тоді робота
.
Коли матеріальна точка рухається вздовж
криволінійної траєкторії під дією
змінної сили, долаючи шлях скінченної
величини, тоді робота![]()
це є криволінійний інтеграл. Коли рух
відбувається за умов дії кількох сил,
наприклад,
це є криволінійний інтеграл. Коли рух
відбувається за умов дії кількох сил,
наприклад,
![]() ,
то
,
то
![]()
![]() .
Значить, елементарна робота кількох
сил дорівнює сумі елементарних робіт
цих сил.
.
Значить, елементарна робота кількох
сил дорівнює сумі елементарних робіт
цих сил.
Потужність
P
це
робота, яку виконано за одиницю часу
![]() .
Розмірність потужності:
.
Розмірність потужності:![]() = 1 Вт
=
= 1 Вт
=
![]()
Кінетичною
енергією матеріальної точки називають
величину
![]() Робота сили
Робота сили![]() при переміщенні матеріальної точки
дорівнює приросту кінетичної енергії.
Доведемо це шляхом інтегрування:
при переміщенні матеріальної точки
дорівнює приросту кінетичної енергії.
Доведемо це шляхом інтегрування:
 .
(1.3.20)
.
(1.3.20)
Отже,
![]() .
(1.3.21)
.
(1.3.21)
Цей результат можна узагальнити на випадок довільної системи матеріальних точок.
Сформулюємо закон збереження кінетичної енергії механічної системи: «Кінетична енергія системи матеріальних точок дорівнює сумі кінетичних енергій матеріальних точок, з яких ця система складається або на які цю систему можна уявно поділити. Приріст кінетичної енергії системи матеріальних точок дорівнює роботі усіх сил, що діють на цю систему».
Якщо
порівняти цей закон із законом збереження
імпульсу системи матеріальних точок,
який можна розглядати як теорему про
зв`язок між
![]() та
та![]() ,
то видно, що вони сильно відрізняються.Внутрішні
сили
(внаслідок рівності дії та протидії,
тобто виконання третього закону Ньютона)
не змінюють імпульсу системи матеріальних
точок, тобто приріст кількості руху не
залежить від внутрішніх сил, але ці
сили
можуть змінювати кінетичну енергію
системи.
,
то видно, що вони сильно відрізняються.Внутрішні
сили
(внаслідок рівності дії та протидії,
тобто виконання третього закону Ньютона)
не змінюють імпульсу системи матеріальних
точок, тобто приріст кількості руху не
залежить від внутрішніх сил, але ці
сили
можуть змінювати кінетичну енергію
системи.
1.3.4. Зіткнення
Терміном зіткнення у механіці позначають процес взаємодії між механічними об`єктами у широкому розумінні, тобто це не є обов`язково явище їхнього торкання один з одним з наступним відштовхуванням. Механічні об`єкти, що зіштовхуються, на нескінченно великій відстані перед зіткненням та після зіткнення ми будемо вважати вільними. Проходячи один повз інший, ці об`єкти взаємодіють в різний спосіб: 1) обмінюються масою аж до об`єднання, утворюючи нові тіла, 2) обмінюються імпульсом і енергією, внаслідок чого ці об’єкти змінюють траєкторію руху порівняно з випадком відсутності взаємодії. Для описання різних типів взаємодії використовують кілька моделей. До їхнього числа належать моделі абсолютно пружного та абсолютно непружного зіткнення.
Абсолютно пружне зіткнення – це ідеалізована модель взаємодії, коли механічні об`єкти після певного наближення знову розходяться без зміни свого внутрішнього стану. Таким чином, кінетична енергія не переходить до інших типів енергії, внаслідок чого повна кінетична енергія механічної системи при абсолютно пружному зіткненні зберігається. Пружні зіткнення відіграють важливу роль в атомній фізиці, де збереження кінетичної енергії можливе не приблизно (ідеалізовано), а точно.
Для абсолютно пружного зіткнення мають місце два закони збереження імпульсу та кінетичної енергії:
 (1.3.22)
(1.3.22)
Тут
літерами
![]() та
та![]() позначено швидкості взаємодіючих
матеріальних точок перед та після
зіткнення.
позначено швидкості взаємодіючих
матеріальних точок перед та після
зіткнення.
Абсолютно непpужне зіткнення має місце, коли після взаємодії механічні об`єкти рухаються з однаковою швидкістю (як одне ціле). При цьому, звичайно, їхня механічна енергія не зберігається.
Решта зіткнень є непpужними, для них має місце втрата частини кінетичної енергії на такі процеси, як нагрівання, деформація взаємодіючих тіл, генерація звуку і таке інше.
Обчислимо
зміну кінетичної енергії двох матеріальних
точок з масами
![]() та
та![]() ,
що утворюють замкнену механічну систему,при
абсолютно непpужному зіткненні
,
що утворюють замкнену механічну систему,при
абсолютно непpужному зіткненні
![]() .Запишемо
спочатку закон збереження імпульсу, що
виконується для замкнених систем
незалежно від того, в який спосіб
відбувається взаємодія складових частин
цих систем:
.Запишемо
спочатку закон збереження імпульсу, що
виконується для замкнених систем
незалежно від того, в який спосіб
відбувається взаємодія складових частин
цих систем:
![]() .
Звідси можна отримати вираз для швидкості
матеріальних точок після абсолютно
непружного зіткнення. Тоді можна
обчислити зміну кінетичної енергії
.
Звідси можна отримати вираз для швидкості
матеріальних точок після абсолютно
непружного зіткнення. Тоді можна
обчислити зміну кінетичної енергії
![]() :
:
![]()
![]() (1.3.23)
(1.3.23)
![]()
![]() ,
,
де
![]()
це зведена маса системи двох матеріальних
точок.
це зведена маса системи двох матеріальних
точок.
Із
співвідношення (1.3.23) видно, що
![]() тільки коли
тільки коли![]() ,
тобто ніколи, оскільки рівність
,
тобто ніколи, оскільки рівність![]() означає рух даних механічних об’єктів
в один бік та з однаковою швидкістю, що
свідчить про неможливість їхнього
зіткнення. Зменшення величини кінетичної
енергії приабсолютно
непpужному зіткненні підтверджує тезу
про перехід частини кінетичної енергії
до немеханічної, що супроводжує такий
тип взаємодії.
означає рух даних механічних об’єктів
в один бік та з однаковою швидкістю, що
свідчить про неможливість їхнього
зіткнення. Зменшення величини кінетичної
енергії приабсолютно
непpужному зіткненні підтверджує тезу
про перехід частини кінетичної енергії
до немеханічної, що супроводжує такий
тип взаємодії.
Лобовим зіткненням (або центральним ударом) називають таке зіткнення механічних об`єктів, що рухаються перед та після взаємодії вздовж однієї прямої, яка поєднує центри мас цих об`єктів.
Розглянемо
пружне лобове зіткнення двох кульок,
які не обертаються навколо жодної осі,
тобто їх можна розглядати як матеріальні
точки. Оберемо систему відліку так, щоб
у ній друга кулька була нерухомою перед
зіткненням:
![]() ,
а одна з її координатних осей була
паралельною вектору швидкості першої
частинки перед зіткненням, тобто вектору
,
а одна з її координатних осей була
паралельною вектору швидкості першої
частинки перед зіткненням, тобто вектору![]() .
Тоді в першому з системи рівнянь (1.3.22)
можна перейти до проекцій векторів
швидкості на обрану вісь координат. Для
спрощення задачі обмежимося випадком
взаємодії матеріальних точок однакової
маси:
.
Тоді в першому з системи рівнянь (1.3.22)
можна перейти до проекцій векторів
швидкості на обрану вісь координат. Для
спрощення задачі обмежимося випадком
взаємодії матеріальних точок однакової
маси:![]() .
Друге рівняння в системі (1.3.22) домножимо
для зручності запису на двійку. За цих
умов з системи (1.3.22) здобудемо:
.
Друге рівняння в системі (1.3.22) домножимо
для зручності запису на двійку. За цих
умов з системи (1.3.22) здобудемо:
 (1.3.24)
(1.3.24)
Піднесемо перше рівняння системи (1.3.24) в квадрат:
![]() .
(1.3.25)
.
(1.3.25)
Якщо
порівняти рівняння (1.3.25) з другим
рівнянням (1.3.24), то дістаємо, що добуток
![]() .
Це може бути у двох випадках: абоU2=0,
або U1=0.
Перший варіант (
.
Це може бути у двох випадках: абоU2=0,
або U1=0.
Перший варіант (![]() )
є нефізичним, бо означає незмінність
імпульсу (а також кінетичної енергії)
другої кульки внаслідок зіткнення,
тобто відсутність взаємодії. Отже,
залишається другий варіант:U1=0,
тобто внаслідок зіткнення перша кулька
передала свій імпульс другій кульці і
зупинилася, а друга кулька почала
рухатися після зіткнення з початковою
швидкістю першої кульки,
)
є нефізичним, бо означає незмінність
імпульсу (а також кінетичної енергії)
другої кульки внаслідок зіткнення,
тобто відсутність взаємодії. Отже,
залишається другий варіант:U1=0,
тобто внаслідок зіткнення перша кулька
передала свій імпульс другій кульці і
зупинилася, а друга кулька почала
рухатися після зіткнення з початковою
швидкістю першої кульки,
![]() .
.
Розглянемо
тепер іншу задачу
випадок пружного нелобового зіткнення
кульок за умов
![]() .
Оберемо систему відліку так, аби друга
кулька перед зіткненням була нерухомою,
.
Оберемо систему відліку так, аби друга
кулька перед зіткненням була нерухомою,![]() =0.
Це припущення не накладає жодних фізичних
обмежень на дане дослідження, проте
спрощує математичні викладки, зокрема
систему рівнянь (1.3.22), що було показано
для попереднього випадку (див. систему
(1.3.24)). Отже, система вихідних рівнянь
має вигляд:
=0.
Це припущення не накладає жодних фізичних
обмежень на дане дослідження, проте
спрощує математичні викладки, зокрема
систему рівнянь (1.3.22), що було показано
для попереднього випадку (див. систему
(1.3.24)). Отже, система вихідних рівнянь
має вигляд:
 (1.3.26)
(1.3.26)
Система
(1.3.26) не визначає однозначно швидкості
кульок після зіткнення
![]() та
та![]() за відомими масамиm1
та m2,
а також швидкістю налітаючої кульки
за відомими масамиm1
та m2,
а також швидкістю налітаючої кульки
![]() .
Дійсно, у загальному випадку одне
векторне і одне скалярне рівняння з
(1.3.26) є еквівалентними чотирьом скалярним
рівнянням, тоді як невідомі шість
компонентів двох векторів
.
Дійсно, у загальному випадку одне
векторне і одне скалярне рівняння з
(1.3.26) є еквівалентними чотирьом скалярним
рівнянням, тоді як невідомі шість
компонентів двох векторів![]() та
та![]() .
Щоправда, тут слід скористатися симетрією
задачі і зауважити, що задача є не
тривимірною, а двовимірною: вектори
.
Щоправда, тут слід скористатися симетрією
задачі і зауважити, що задача є не
тривимірною, а двовимірною: вектори![]() ,
,![]() та
та![]() лежать в одній площині. Тому векторне
рівняння в (1.3.26) є еквівалентним двом
скалярним, і система рівнянь (1.3.26) задає
три умови на чотири компоненти векторів
лежать в одній площині. Тому векторне
рівняння в (1.3.26) є еквівалентним двом
скалярним, і система рівнянь (1.3.26) задає
три умови на чотири компоненти векторів![]() та
та![]() .
Але навіть з урахуванням зауваження
про двовимірний характер задачі вона
не розв’язується однозначно. Тому слід
ввести ще одне обмеження: порахуємо, на
якиймаксимальний
кут max
може відхилитися кулька внаслідок
пружного зіткнення з нерухомою кулькою
іншої маси.
.
Але навіть з урахуванням зауваження
про двовимірний характер задачі вона
не розв’язується однозначно. Тому слід
ввести ще одне обмеження: порахуємо, на
якиймаксимальний
кут max
може відхилитися кулька внаслідок
пружного зіткнення з нерухомою кулькою
іншої маси.
Для
знаходження max
перейдемо до системи відліку, яка
пов’язана з центром мас. Нагадаємо, що
швидкість центра мас відносно лабораторної
системи відліку визначається так:
![]() Позначимо імпульси кульок перед
зіткненням відносно системи центра мас
Позначимо імпульси кульок перед
зіткненням відносно системи центра мас![]() та
та![]() .
Тоді імпульс першої кульки перед
зіткненням відносно лабораторної
системи відліку:
.
Тоді імпульс першої кульки перед
зіткненням відносно лабораторної
системи відліку:
![]() (1.3.27)
(1.3.27)
Тут
![]()
це швидкість першої кульки до зіткнення
відносно системи центра мас. Тоді її
імпульс до зіткнення відносно системи
центра мас:
це швидкість першої кульки до зіткнення
відносно системи центра мас. Тоді її
імпульс до зіткнення відносно системи
центра мас:
![]()
![]() ,
(1.3.28)
,
(1.3.28)
де
![]()
це зведена маса (див. формулу (1.3.23)).
це зведена маса (див. формулу (1.3.23)).
Імпульс
другої кульки в лабораторній системі
відліку:
![]() бо так ми обрали лабораторну систему
відліку, що
бо так ми обрали лабораторну систему
відліку, що![]() .
Отже, імпульс другої кульки перед
зіткненням відносно системи центра
мас:
.
Отже, імпульс другої кульки перед
зіткненням відносно системи центра
мас:
![]() (1.3.29)
(1.3.29)
Тобто:
![]() .
На перший погляд, це дивно, але нагадаємо,
що під час аналізу теореми про рух центра
мас було, зокрема, відзначено, що сумарний
імпульс замкненої механічної системи,
порахований відносно центра мас, дорівнює
нулю:
.
На перший погляд, це дивно, але нагадаємо,
що під час аналізу теореми про рух центра
мас було, зокрема, відзначено, що сумарний
імпульс замкненої механічної системи,
порахований відносно центра мас, дорівнює
нулю:![]() До речі, в такий спосіб ми перевірили,
що досі не помилились у викладці. Значить,
після зіткнення сумарний імпульс також
буде дорівнювати нулю:
До речі, в такий спосіб ми перевірили,
що досі не помилились у викладці. Значить,
після зіткнення сумарний імпульс також
буде дорівнювати нулю:![]() .
.
Зверніть увагу на те, що досі закон збереження енергії не був використаний, тому для випадку довільного зіткнення (коли закон збереження кінетичної енергії може і не виконуватися) маємо таке розташування імпульсів, що представлено на рис. 1.3.1.
Якщо зіткнення є пружним, тоді виконується закон збереження кінетичної енергії, тому характер взаємодії буде дещо іншим, порівняно з тим, що наведено на рис. 1.3.1. Застосовуючи закон збереження кінетичної енергії, маємо наступне рівняння:
![]() . (1.3.30)
. (1.3.30)
Оскільки
![]() та
та![]() ,
то з рівняння (1.3.30) можна знайти наступне
співвідношення:
,
то з рівняння (1.3.30) можна знайти наступне
співвідношення:![]() =
=![]() ,
що означає рівність модулів імпульсів
першої і другої кульок перед і після
зіткнення, якщо їх розглядати відносно
центра мас:
,
що означає рівність модулів імпульсів
першої і другої кульок перед і після
зіткнення, якщо їх розглядати відносно
центра мас:
|
|
|
Рис. 1.3.1 |

![]() .
(1.3.31)
.
(1.3.31)
Таким чином, пружне зіткнення в системі центра мас матиме вигляд, що представлено на рис. 1.3.2, який відрізняється від попереднього рисунка. Дослідження пружного зіткнення кульок довільної маси в системі центра мас має самостійне значення. Як було показано, в системі центра мас пружне зіткнення двох кульок виглядає так, що діаметр кола, який складається з імпульсів кульок перед зіткненням, повертається внаслідок зіткнення навколо центра кола, та імпульси кульок після зіткнення утворюють інший діаметр цього ж кола.
Повернемося
до лабораторної системи відліку та
визначимо максимальний кут, на який
здатна легша нерухома кулька відхилити
внаслідок зіткнення важку налітаючу
кульку,
![]() ,
від напрямку, вздовж якого рухалась
важча кулька перед зіткненням. Як було
показано вище,
,
від напрямку, вздовж якого рухалась
важча кулька перед зіткненням. Як було
показано вище,![]() .
Складові вектори
.
Складові вектори![]() і
і![]() мають однаковий напрямок, що збігається
із напрямком швидкості першої частинки
перед зіткненням
мають однаковий напрямок, що збігається
із напрямком швидкості першої частинки
перед зіткненням![]() .
При цьому внаслідок умови задачі
.
При цьому внаслідок умови задачі![]() дістаємо, що за модулем перша складова
є меншою:
дістаємо, що за модулем перша складова
є меншою:![]() ,
оскільки
,
оскільки
|
|
|
Рис. 1.3.2 |
|
|
|
Рис. 1.3.3 |

![]() >
>![]() . (1.3.32)
. (1.3.32)
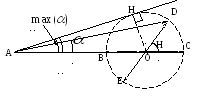
Нарисуємо
для ілюстрації задачі наступний рис.
1.3.3, на якому
![]() Оскільки
Оскільки![]() ,
то
,
то![]() Використовуючи попередні результати,
що здобуті у системі центра мас, нарисуємо
коло радіусом
Використовуючи попередні результати,
що здобуті у системі центра мас, нарисуємо
коло радіусом![]() навколо точкиO.
Тоді внаслідок взаємодії досліджуваних
матеріальних точок їхні імпульси (тобто
вектори
навколо точкиO.
Тоді внаслідок взаємодії досліджуваних
матеріальних точок їхні імпульси (тобто
вектори
![]() і
і![]() )
повертаюся на кут
)
повертаюся на кут![]() і переходять у вектори
і переходять у вектори![]() і
і![]() ,
відповідно. При цьому довжини цих
векторів не змінюються, тобто усі вони
утворюють радіуси одного кола. З
геометричної побудови (див. рис. 1.3.3)
видно, що ступінь відхилення імпульсу
першої кульки від її початкового напрямку
внаслідок зіткнення з другою кулькою
масиm2
характеризується кутом
,
відповідно. При цьому довжини цих
векторів не змінюються, тобто усі вони
утворюють радіуси одного кола. З
геометричної побудови (див. рис. 1.3.3)
видно, що ступінь відхилення імпульсу
першої кульки від її початкового напрямку
внаслідок зіткнення з другою кулькою
масиm2
характеризується кутом
![]() .
.
Максимальний
кут відхилення
![]() буде спостерігатися тоді, коли точкаD
співпаде з точкою H,
тобто AH
буде дотичною лінією, тому:
буде спостерігатися тоді, коли точкаD
співпаде з точкою H,
тобто AH
буде дотичною лінією, тому:
![]() .
Отже, максимальному відхиленню відповідає
наступне значення синуса кута:
.
Отже, максимальному відхиленню відповідає
наступне значення синуса кута:
![]() (1.3.33)
(1.3.33)
|
|
|
Рис. 1.3.4 |

З аналізу
(1.3.33) можна зробити висновок, що нерухома
легка кулька
![]() не може сильно відхилити важку кульку
від попередньої траєкторії руху.
не може сильно відхилити важку кульку
від попередньої траєкторії руху.
Розглянемо
випадок пружного зіткнення легкої
частинки з нерухомою важкою частинкою,
![]() ,
тобто протилежний до попереднього
випадок:
,
тобто протилежний до попереднього
випадок:![]() .
Нарисуємо розташування імпульсів
частинок перед та після взаємодії в
системі центра мас, де всі імпульси –
це є радіуси одного кола (див. рис. 1.3.4).
Таким чином, маємо:
.
Нарисуємо розташування імпульсів
частинок перед та після взаємодії в
системі центра мас, де всі імпульси –
це є радіуси одного кола (див. рис. 1.3.4).
Таким чином, маємо:![]() .
Вектор
.
Вектор![]() визначимо в такий спосіб:
визначимо в такий спосіб:![]() .
На відміну від попереднього випадку,
коли
.
На відміну від попереднього випадку,
коли![]() ,
зараз вектор
,
зараз вектор![]() є меншим за величиною порівняно з
вектором
є меншим за величиною порівняно з
вектором![]() .
Тобто в даному випадку маємо нерівність
.
Тобто в даному випадку маємо нерівність
![]() , (1.3.34)
, (1.3.34)
оскільки
![]() .
Значить, вектор
.
Значить, вектор![]()
![]()
це є імпульс легкої частинки після
зіткнення. З рис. 1.3.4 видно, що цей вектор
може складати будь-який кут з напрямком
свого попереднього руху
це є імпульс легкої частинки після
зіткнення. З рис. 1.3.4 видно, що цей вектор
може складати будь-який кут з напрямком
свого попереднього руху
![]() .
.
Таким
чином, легка частинка може розсіятися
на будь-який кут після взаємодії з
важкою. Але продовжити свій рух після
взаємодії без зміни своєї траєкторії
вона не може, тобто рух вздовж вектора
![]() заборонено.
заборонено.
Зауваження: оскільки під час нашого теоретичного дослідження не було враховано справжніх скінченних розмірів частинок, то реально кут розсіяння є дещо меншим.