

Вивчення обертального руху твердого тіла за допомогою маятника Обербека.
Мета лабораторної роботи:
Вивчення основного закону динаміки обертального руху твердого тіла, визначення моменту інерції хрестовини маятника Обербека.
Деякі теоретичні відомості.
Твердим тілом (або абсолютно твердим тілом) у механіці називають систему матеріальних точок (елементів тіла), відстань між якими у процесі руху не змінюються. Згідно з визначенням тверде тіло не деформується під дією зовнішніх сил. Реальне тверде тіло можна вважати твердим тілом, якщо деформації, що виникають під дією зовнішніх сил, малі і в умовах задачі ними можна знехтувати.
Обертальним рухом твердого тіла навколо нерухомої осі називається рух, при якому існують хоч би дві нерухомі точки тіла. Пряма лінія, яка проходить через ці точки, називається віссю обертання. Можна показати, що усі інші точки тіла, які не лежать на осі обертання, рухаються в перпендикулярній до осі обертання площині по колах, центри яких лежать на осі обертання. Лінійна швидкість цих точок перпендикулярна до осі обертання і направлена по дотичній до кола.
Основними кінематичними характеристиками обертального руху твердого тіла є його кутова швидкість і кутове прискорення.
|
Рис.1
|
Нехай ОО– нерухома вісь обертання твердого
тіла. Направимо вісь нерухомої
декартової прямокутної системи
координат так, щоб вісьzспівпадала
з віссю обертання (рис.1). Проведемо з
початку координат до довільної точкиАрадіус вектор |

правилом: воно утворює правий гвинт з
додатнім напрямком осі z декартової
системи координат. Кут![]() вимірюється у радіанах.
вимірюється у радіанах.
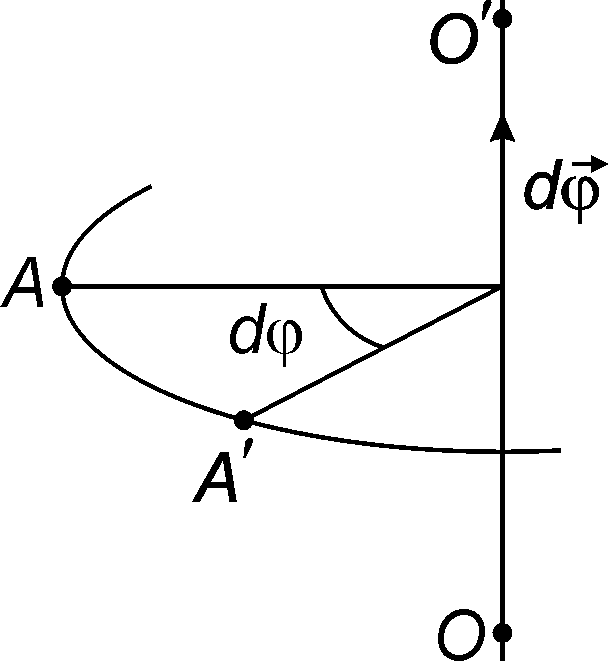
Нехай тверде тіло повернулося на
нескінченно малий кут
![]() навколо нерухомої вісіОО.
При цьому довільна точкаАтіла,
рухаючись по колу, зайняла положенняА
(рис.2).Вектором елементарного
повороту називається вектор
навколо нерухомої вісіОО.
При цьому довільна точкаАтіла,
рухаючись по колу, зайняла положенняА
(рис.2).Вектором елементарного
повороту називається вектор![]() ,
модуль якого дорівнює модулю кута
повороту
,
модуль якого дорівнює модулю кута
повороту![]() :
:![]() .
Вектор
.
Вектор![]() направлений вздовж вісі обертання
тіла, при цьому його напрямок пов’язаний
правилом правого гвинта (буравчика) з
напрямком обертання тіла. згідно з цим
правилом напрямок вектора кута
направлений вздовж вісі обертання
тіла, при цьому його напрямок пов’язаний
правилом правого гвинта (буравчика) з
напрямком обертання тіла. згідно з цим
правилом напрямок вектора кута
|
Рис.2 |
повороту
Нехай тверде тіло, обертаючись навколо
нерухомої вісі ОО,
здійснило за елементарний проміжок
часуdtелементарний поворот |
![]() , (1)
, (1)
|
Рис.3
|
Напрямок вектора кутової швидкості
Якщо вісь zнерухомої декартової системи координат направлена вздовж вісі обертання тіла, то проекція на цю вісь вектора кутової швидкості дорівнює
|

![]() . (2)
. (2)
Кутовим прискоренням називається вектор
![]() ,
який дорівнює першій похідній вектора
кутової швидкості за часом, або другій
похідній вектора кутового переміщення
за часом:
,
який дорівнює першій похідній вектора
кутової швидкості за часом, або другій
похідній вектора кутового переміщення
за часом:
 . (3)
. (3)
Напрямок вектора
![]() співпадає з напрямком вектора
співпадає з напрямком вектора![]() прирощення кутової швидкості за
нескінченно малий проміжок часуdt.Якщо тіло обертається навколо нерухомої
вісі обертання ОО', то вектор прирощення
кутової швидкості
прирощення кутової швидкості за
нескінченно малий проміжок часуdt.Якщо тіло обертається навколо нерухомої
вісі обертання ОО', то вектор прирощення
кутової швидкості![]() і вектор кутового прискорення
і вектор кутового прискорення![]() лежать на вісі обертання (рис.4).
лежать на вісі обертання (рис.4).
|
Рис.4 |
Якщо з течією часу кутова швидкість
в ході обертання твердого тіла зростає,
то вектори
|

![]() . (4)
. (4)
Зв’язок між векторами кутової швидкості
![]() і кутового прискорення
і кутового прискорення![]() і відповідними їм лінійними величинами
для певної точки твердого тіла, яка
лежить на відстані
і відповідними їм лінійними величинами
для певної точки твердого тіла, яка
лежить на відстані![]() від вісі обертання, такий:
від вісі обертання, такий:
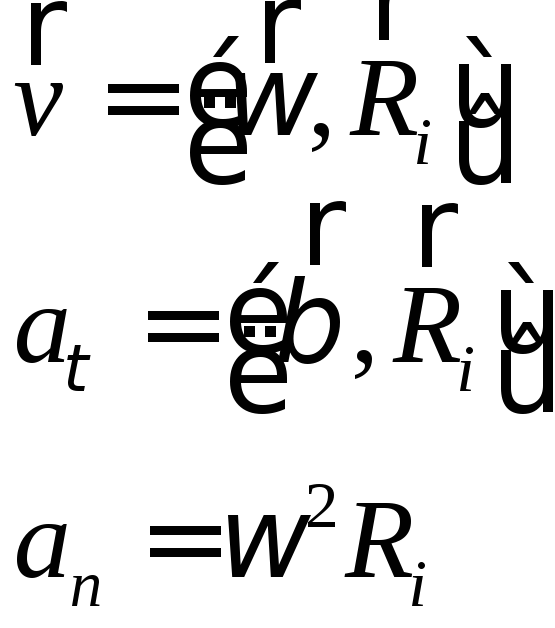 , (5)
, (5)
де
![]() - радіус-вектор даної точки,
- радіус-вектор даної точки,![]() -
тангенціальне прискорення цієї точки,
-
тангенціальне прискорення цієї точки,![]() -
нормальне прискорення цієї точки.
-
нормальне прискорення цієї точки.
Основними динамічними характеристиками
обертального руху є момент сили, момент
імпульсу і момент інерції. Між поступальним
і обертальним рухом існує аналогія.
Момент сили
![]() є
аналогом сили, момент імпульсу
є
аналогом сили, момент імпульсу![]() - аналогом імпульсу, а момент інерціїJ– аналогом маси.
- аналогом імпульсу, а момент інерціїJ– аналогом маси.
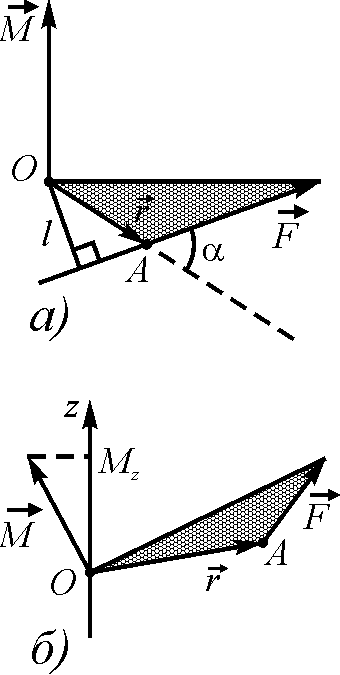
Рис.5
Момент сили відносно нерухомої точки
О, яка лежить на вісі обертання, –
це фізична величина, яка визначається
векторним добутком радіуса вектора![]() ,
проведеного з точкиОв точкуАприкладання сили (рис.5), на вектор сили
,
проведеного з точкиОв точкуАприкладання сили (рис.5), на вектор сили![]()
![]() . (6)
. (6)
Вектор момента сили напрямлений вздовж
вісі обертання відповідно до правила
правого буравчика: якщо обертати буравчик
від радіуса-вектора
![]() до вектора сили
до вектора сили![]() ,
то поступальний рух його вістря покаже
напрям вектора
,
то поступальний рух його вістря покаже
напрям вектора![]() (рис.5). Модуль вектора моменту сили
дорівнює добутку модуля вектора сили
на найкоротшу відстань від точкиОдо лінії дії сили, або добутку модуля
вектора сили на плече сили.
(рис.5). Модуль вектора моменту сили
дорівнює добутку модуля вектора сили
на найкоротшу відстань від точкиОдо лінії дії сили, або добутку модуля
вектора сили на плече сили.
|
Рис.6 |
Момент сили відносно нерухомої вісі
z – це скалярна величинаMz,
яка дорівнює проекції на цю вісь
вектора моменту сили, визначеного
відносно довільної точки О даної вісіz. Значення моментуMz
не залежить від вибору положення
точкиОна осіz. Якщо вісь z
співпадає з напрямком вектора
Моментом імпульсу
|

добутком радіуса-вектора
![]() цієї точки, проведеного з точки О (рис.6),
на імпульс цієї матеріальної точки
цієї точки, проведеного з точки О (рис.6),
на імпульс цієї матеріальної точки![]()
![]() . (7)
. (7)
Напрямок вектора моменту імпульсу
матеріальної точки визначається за
правилом правого буравчика. Якщо обертати
буравчик від радіуса-вектора
![]() до вектора імпульсу
до вектора імпульсу![]() ,
то поступальний рух його вістря покаже
напрям вектора
,
то поступальний рух його вістря покаже
напрям вектора![]() (рис.6). Модуль вектора моменту імпульсу
дорівнює добутку модуля вектора імпульсу
на найкоротшу відстань від точкиОдо прямої, вздовж якої направлений
імпульс точки, або добутку модуля вектора
імпульсу на плече імпульсу. Момент
імпульсу матеріальної точкиmiвідносно нерухомої осіz – це скалярна
величинаLiz, яка дорівнює
проекції на цю вісь вектора моменту
сили, визначеного відносно довільної
точкиОданої вісіz. Значення
моменту імпульсуLiz не
залежить від вибору положення точкиОна вісіz. Якщо вісьzспівпадає
з напрямком вектора
(рис.6). Модуль вектора моменту імпульсу
дорівнює добутку модуля вектора імпульсу
на найкоротшу відстань від точкиОдо прямої, вздовж якої направлений
імпульс точки, або добутку модуля вектора
імпульсу на плече імпульсу. Момент
імпульсу матеріальної точкиmiвідносно нерухомої осіz – це скалярна
величинаLiz, яка дорівнює
проекції на цю вісь вектора моменту
сили, визначеного відносно довільної
точкиОданої вісіz. Значення
моменту імпульсуLiz не
залежить від вибору положення точкиОна вісіz. Якщо вісьzспівпадає
з напрямком вектора![]() ,
то момент імпульсу є вектором, який
співпадає з цією віссю.
,
то момент імпульсу є вектором, який
співпадає з цією віссю.
Між моментом сили
![]() ,
яка діє на тверде тіло, і моментом
імпульсу абсолютно твердого тіла
,
яка діє на тверде тіло, і моментом
імпульсу абсолютно твердого тіла![]() існує зв’язок, який встановлюється
основним рівнянням динаміки обертального
руху твердого тіла:
існує зв’язок, який встановлюється
основним рівнянням динаміки обертального
руху твердого тіла:
 . (8)
. (8)
Дослід показує, що зміна швидкості обертального руху твердого тіла, тобто його кутове прискорення, залежить не тільки від маси твердого тіла, що обертається, але й від її розподілу відносно нерухомої вісі обертання. Величина, яка враховує обидві ці обставини, і виступає мірою інертності твердого тіла у обертальному русі, називається моментом інерції твердого тіла відносно нерухомої вісі обертання J.
Встановимо зв’язок між моментом імпульсу
і моментом інерції твердого тіла. Як
відомо, кутове переміщення точок твердого
тіла в процесі його обертального руху
виникає внаслідок дії на тверде тіло
деякого моменту сил. При цьому на кожний
елемент
![]() маси твердого тіла (рис.7), яке рухається
з лінійною швидкістю
маси твердого тіла (рис.7), яке рухається
з лінійною швидкістю![]() ,
діє тангенціальна сила
,
діє тангенціальна сила
![]() . (9)
. (9)
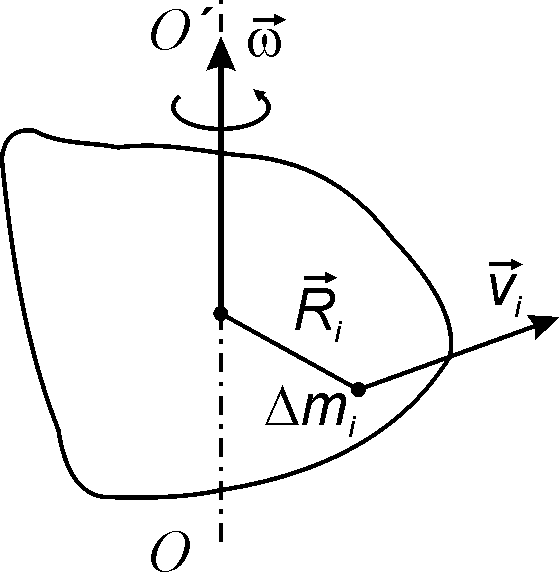
Рис.7
Момент цієї сили відносно довільної точки А, яка лежить на нерухомій вісі ОО',
![]() . (10)
. (10)
Сумарний момент сил, який діє на все тверде тіло, що складається з Nелементів маси, визначається за формулою:
 . (11)
. (11)
Скалярна величина
![]() називається моментом інерції і-того
елемента маси твердого тіла відносно
нерухомої вісіОО'.Момент інерції
усього твердого тіла визначається за
формулою
називається моментом інерції і-того
елемента маси твердого тіла відносно
нерухомої вісіОО'.Момент інерції
усього твердого тіла визначається за
формулою
 . (12)
. (12)
Користуючись формулами (11) та (12), отримаємо формулу, яка також виражає закон динаміки обертального руху твердого тіла:
![]() . (13)
. (13)
З рівняння (13) бачимо, що вектор моменту
сили
![]() ,
яка діє на тверде тіло, що обертається,
співпадає за напрямком з напрямком його
вектора кутового прискорення
,
яка діє на тверде тіло, що обертається,
співпадає за напрямком з напрямком його
вектора кутового прискорення![]() .
Якщо момент інерції тіла сталий, то у
випадку обертання тіла навколо нерухомої
вісіОО,
закон динаміки обертального руху можна
сформулювати так: модуль кутового
прискорення прямо пропорційний до
моменту сили відносно даної вісі і
обернено пропорційний до моменту інерції
твердого тіла відносно даної вісі
.
Якщо момент інерції тіла сталий, то у
випадку обертання тіла навколо нерухомої
вісіОО,
закон динаміки обертального руху можна
сформулювати так: модуль кутового
прискорення прямо пропорційний до
моменту сили відносно даної вісі і
обернено пропорційний до моменту інерції
твердого тіла відносно даної вісі
 . (14)
. (14)
Залежність модуля кутового прискорення від модуля обертального моменту сили та моменту інерції відносно нерухомої вісі обертання можна визначити експериментально за допомогою хрестоподібного маятника Обербека (рис.7).
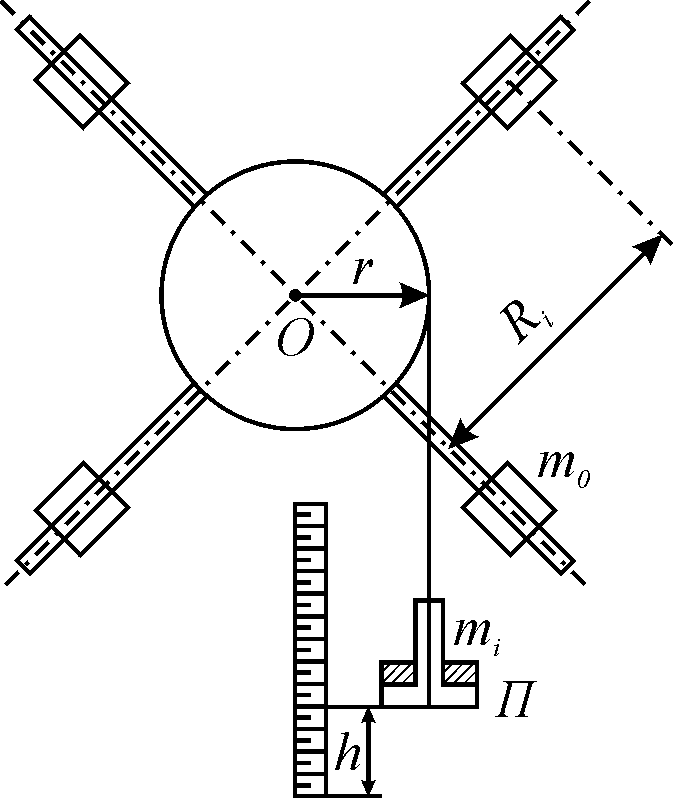
Рис.8
Опис експериментальної установки.
Основна частина цього маятника – хрестовина – складається зі шківа та чотирьох легких стрижнів, які закріплені (вгвинчені) у шків, перпендикулярно осі шківа.
Хрестовина може обертатися відносно нерухомої горизонтальної вісі ОО', яка співпадає з віссю шківа. На кожному зі стрижнів хрестовини закріплюють по одному додаткові вантажі, які мають циліндричну форму. Маси вантажівm0 однакові. Їх величина вказана на установці.
З метою зміни моменту інерції приладу вантажі m0можна переміщувати вздовж стрижнів та закріплювати на будь-яких відстаняхRiвід осі обертання маятникаОО'. На шків намотана в один шар тонка, але доволі міцна нитка. До вільного кінця нитки прив’язана платформаП відомої маси. На платформу кладуть вантаж масоюm. Якщо нитці дати можливість розмотуватися у результаті падіння платформи з вантажем масоюm, то вона буде натягуватись. Сила натягу нитки створює обертальний момент сили. Під дією цього моменту сили маятник Обербека почне обертатися з кутовим прискоренням.
|
Рис.9 |
Оскільки безпосереднє вимірювання обертального моменту сили і кутового прискорення утруднено, то ці величини замінюють іншими, більш доступними для вимірювання.
На падаючий тягар (рис.9) діють (силою
тертя нехтуємо) такі сили: сила тяжіння,
модуль якої
|
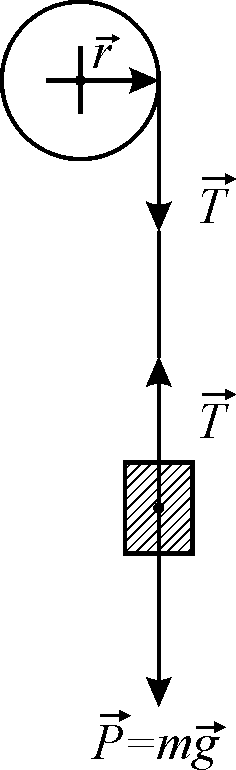
![]() (15)
(15)
Звідси
![]() . (16)
. (16)
Момент сили натягу нитки відносно вісі обертання ОО
![]() , (17)
, (17)
де r – радіус шківа (плече сили натягу нитки). У свою чергу, як вже зазначено вище,
![]() , (18)
, (18)
де JОО- момент інерції маятника відносно вісі обертанняОО,- кутове прискорення маятника.
Кутове прискорення маятника можна визначити з таких міркувань. Нехай платформа з вантажем масою mпадає з висотиh. Тоді прискорення його руху визначається за формулою
![]() . (19)
. (19)
Якщо умови експерименту такі, що у його ході нитка змотується із шківа маятника без тертя і ковзання, то лінійне (тангенціальне) прискорення точок його поверхні також дорівнює а. Тоді величину кутового прискорення можна визначити за формулою
![]() . (20)
. (20)
Момент інерції Jмаятника відносно
осіОО', який, як відомо, є скалярною
адитивною величиною, є сумою моменту
інерції хрестовини без додаткових
вантажів –Jхрта моменту
інерції додаткових вантажівm0–![]() відносно осіОО':
відносно осіОО':
![]() .(21)
.(21)
Момент інерції додаткового вантажу
можна визначити аналітично, якщо прийняти
його за матеріальну точку, яка знаходиться
на відстані Ri від
вісі обертання. Як відомо, у цьому випадку
момент інерції одного додаткового
вантажу![]() .
Оскільки додаткових вантажів чотири,
то остаточно момент інерції усіх
додаткових вантажів можна розрахувати
за формулою
.
Оскільки додаткових вантажів чотири,
то остаточно момент інерції усіх
додаткових вантажів можна розрахувати
за формулою
![]() . (22)
. (22)
Остаточно, враховуючи вираз (22), момент інерції хрестовини можна визначити за такою формулою
![]() . (23)
. (23)
Порядок виконання роботи.
Виміряйте лінійкою висоту падіння тягарців h, а штангенциркулем – радіус шківаr. Усередніть результати, отримані у ході проведення не менше ніж трьох вимірювань. Дані запишіть у таблицю №1.
Закріпіть додаткові вантажі на кінцях стрижнів симетрично до вісі обертання і на однакових відстанях від вісі обертання та виміряйте лінійкою відстань Riвід вісі обертання до центра мас вантажуm0. Усередніть результати, отримані у ході проведення не менше ніж трьох вимірювань. Дані запишіть у таблицю №1.
Послідовно навантажуючи платформу П, що підвішена до кінця нитки, яка намотана на шків в один шар, тягарцями, маси яких mівідомі, визначте, користуючись секундоміром, час падінняt кожного з тягарців масиmі з висотиh.Усередніть результати, отримані у ході не менше ніж трьох вимірювань. Дані запишіть у таблицю№1.
За формулами (19) і (20) розрахуйте модулі лінійного ата кутового прискорення, а за формулою (17) момент сили натягу ниткиМвідносно нерухомої вісі обертання. Дані розрахунків запишіть у таблицю №1.
Змістіть центри мас усіх чотирьох додаткових вантажів m0 на два сантиметри ближче до вісі обертання і закріпіть їх на однаковій відстані від вісі обертанняRi. Виміряйте лінійкою цю відстань. Дані запишіть у таблицю №1. За методикою, описаною у п.3 і п.4, проведіть вимірювання і розрахунки для даного значення Ri.
Змістіть центри мас усіх чотирьох додаткових вантажів m0 ще на два сантиметри ближче до осі обертання і закріпіть їх на однаковій відстані від осі обертанняRi. Виміряйте лінійкою цю відстань. Дані запишіть у таблицю №1. За методикою, описаною у п.3 і п.4, проведіть вимірювання і розрахунки для даного значенняRi.
За значенням Мі таβідля кожного значенняRіпобудуйте графіки залежностейМ=f(). З кожного з графіків визначте момент інерції маятника ОбербекаJiвідносно нерухомої осі обертанняOO, скориставшись такою формулою
![]() . (24)
. (24)
За формулою (22) обчисліть момент інерції додаткових вантажів для кожного із значень Ri, а за формулою (23) визначте значення моменту інерції хрестовини маятника ОбербекаJхр. Дані, отримані у результаті розрахунків, запишіть у таблицю №1. Розрахуйте середнє значення моменту інерції хрестовини маятника Обербека відносно нерухомої вісі
 ,
а також абсолютну та відносну похибки.
,
а також абсолютну та відносну похибки.
Таблиця №1
|
Ri,м
|
mi,кг
|
|
|
|
|
ai, м/с2 |
βi, рад/с2 |
Mi, кг٠м |
Ji, кг٠м2 |
Jхр, кг٠м2 |
кг٠м2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Література: [1-16,20-35]
Лабораторна робота №5