Шпоры готов
.1.pdf1.Общие сведения об электромеханических переходных процессах. Понятия о статической, динамической, результирующей устойчивости ЭСС. Классификация электромеханических переходных процессов. Основные допущения, принимаемые при их анализе.
2.Схемы замещения основных элементов ЭС. Устойчивость режимов ЭС и методы ее исследования.
3.Электромеханические характеристики синхронных машин. Уравнение движения и инерционная постоянная СМ.
4.Условия работы синхронного генератора в простейшей одномашинной системе.
5.Векторная диаграмма в простейшей электрической системе и вытекающие из нее соотношения.
6.Угловые характеристики СГ при синхронной скорости вращения ротора и их анализ.
7.Синхронная машина в сложной электрической системе. Собственные и взаимные сопротивления и проводимости СМ.
8.Выражения для активной и реактивной мощностей СМ. Методы определения собственных и взаимных сопротивлений: метод единичных токов, метод исключения узлов.
9.Условия работы СМ в простейшей системе при скорости отличной от синхронной. Понятие асинхронного режима. Применение метода наложения. Синхронный и асинхронный моменты СМ.
10.Элементарная теория статической устойчивости. Математические основы анализа статической устойчивости простейшей ЭЭС и ее состояния равновесия. Уравнения возмущенного движения. Уравнения первого приближения и анализ состояний равновесия. Виды нарушения устойчивости.
11.Статическая устойчивость одномашинной системы. Уравнения первого приближения. Характеристическое уравнения и его корни. Виды нарушения устойчивости. Позиционаня модель и условия устойчивости.
12.Критерии статической устойчивости для сложных ЭЭС. Критерий Гурвица.
13.Анализ статической устойчивости сложной ЭЭС при наличии шин неизменного напряжения.
14.Понятие о предельных по устойчивости режимах. Методы анализа.
15.Область устойчивости и область существования установившихся режимов. Коэффициент запаса по мощности и его нормативные значения.
16.Учет автоматического регулятора возбуждения пропорционального действия у генератора.
17.Элементарная теория динамической устойчивости ЭЭС. Основные понятия. Общая характеристика методов анализа динамической устойчивости.
18.Динамическая устойчивость простейшей системы.
19.Применение качественных методов к исследованию устойчивости динамических переходов в простейшей системе.
20.Энергетические соотношения, характеризующие движение ротора СГ при «больших» возмущениях.
21.Метод площадей. Определение предельного допустимого отключения повреждения по правилу площадей. Определение предельного времени отключения трехфазного к.з.
22.Исследование динамической устойчивости простейших моделей ЭЭС на основе численного интегрирования уравнения движения. Теоретические основы метода последовательных интервалов. Применение метода последовательных интервалов к расчету динамической устойчивости простейшей и сложной систем.
23.Определение коэффициента запаса статической устойчивости по напряжению, его физический смысл. Статическая
идинамическая устойчивость асинхронной двигательной нагрузки.
24.Мероприятия по улучшению устойчивости и качества переходных процессов.

1. Общие сведения об электромеханических переходных процессах. Понятия о статической, динамической, результирующей устойчивости ЭСС. Классификация электромеханических переходных процессов. Основные допущения, принимаемые при их анализе.
ЭМППтакие ПП, в которых кроме электрических и магнитных параметров также изменяются и физические параметры: γ и δ – механический и электрический углы положения ротора.
Механический угол (γ)- имеет полный период в зависимости от количества полюсов (4 полюса Т=180град) Электрический угол (δ) – имеет T=360град всегда. Таким образом, мы можем совмещать все характеристики друг с другом.
Также учитывается изменение скорости вращения ротора.
Статическая устойчивость – способность системы сохранять (восстанавливать) исходный (или близкий к нему) режим при действии «малых» возмущений.
Динамическая устойчивость – способность системы восстанавливать длительно существующий установившийся режим при «больших» возмущениях.
Результирующая устойчивость – способность системы возвращаться в длительно существующий установившийся режим после кратковременного нарушения устойчивости.
Переходные процессы можно различать по ряду признаков:
- по причинам возникновения или по видам возмущающих воздействий.
-по допущениям при составлении и решении ДУ;
-по скорости протекания этих процессов
-по структуре исследуемой системы
Допущения:
Электрические системы, режимы которых мы рассматриваем являются нелинейными. Нелинейность определяется:
1. Зависимостью параметров системы (X,R) от параметров режима 2. Нелинейность связи параметров режима между собой. НЕЛИНЕЙНОСТЬ ПАРАМЕТРОВ ОБЫЧНО НЕ УЧИТЫВАЕТСЯ.
Все упрощения анализа ПП заключаются в выделении главного:
Из сложных явлений выделяют отдельные процессы, характеризуемые как можно меньшим числом параметров и простыми соотношениями.
Одним из приемов является замена реальных динамических характеристик статическими, а также рассмотрение дин. ЭС как позиционной (где параметры режима зависят только от одного состояния системы, от взаимного положения ее элементов, независимо от того, как было достигнуто это состояние.
Статическая устойчивость→СЛДУ:
1. Алгебраический метод (П(t))
2. Качественно, на основе линеаризации.
3. Точно
4. Приближенно, да/нет.
Динамическая устойчивость→СНДУ:
1. Алгебраически (П(t))
2. Численное интегрирование.
3. Качественные методы (да/нет).
4. метод площадей
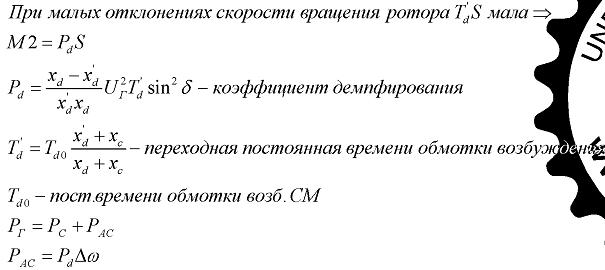
5. метод энергий ωс – внешняя синхронная частота, которая остается постоянной по отношению к системе конечной мощности.
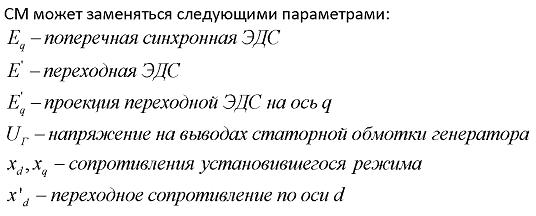
Одним из средств упрощающих представление от изучаемых ПП и облегчающих составление уравнений – СЗ. СМ может заменяться следующими параметрами:
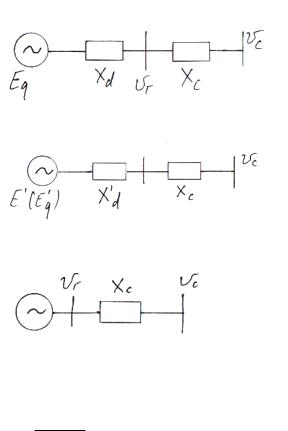
2. Схемы замещения основных элементов ЭС. Устойчивость режимов ЭС и методы ее исследования.
Одним из средств, упрощающих представление об электромеханических ПП и облегчающих составление уравнений сложных процессов являются схемы замещения.
Схема замещения электрических систем обычно представляет собой соединение простейших элементов электрической цепи: индуктивности, емкости, активного сопротивления. Элементы схемы замещения могут быть как линейными так и нелинейными.
ЛЭП:
ZË RË jX Ë YË b0 l
Устойчивость – способность системы восстанавливать свое исходное состояние, нормальный рабочий режим, или режим, близкий к нему после какого-либо нарушения этого режима (возмущения).
Статическая устойчивость – способность системы сохранять (восстанавливать) исходный (или близкий к нему) режим при действии «малых» возмущений.
Динамическая устойчивость – способность системы восстанавливать длительно существующий установившийся режим при «больших» возмущениях.
Результирующая устойчивость – способность системы возвращаться в длительно существующий установившийся режим после кратковременного нарушения устойчивости.
Методы анализа устойчивости:
Статическая устойчивость→СЛДУ:
1.Алгебраический метод (П(t))
2.Качественно, на основе линеаризации.
3.Точно
4.Приближенно, да/нет.
Динамическая устойчивость→СНДУ:
1.Алгебраически (П(t))
2.Численное интегрирование.
3.Качественные методы (да/нет).
4.метод площадей
5.метод энергий
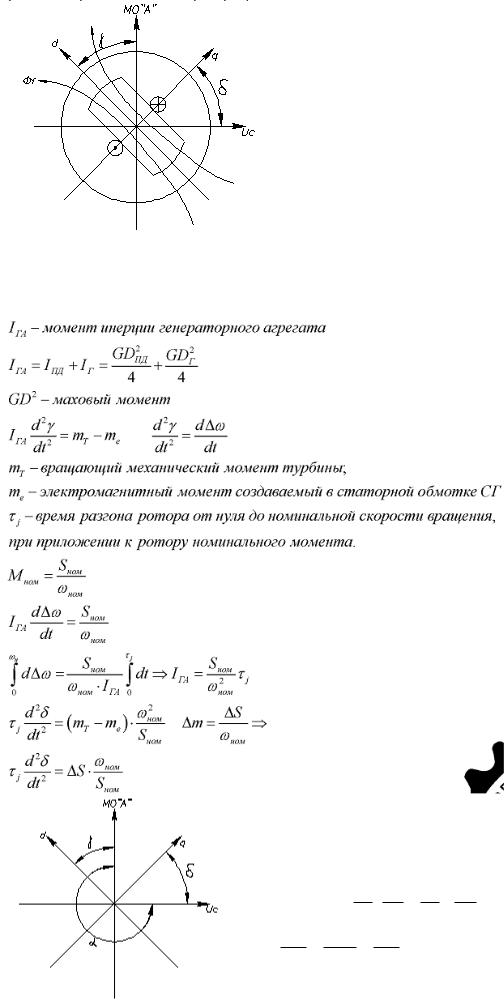
3. Электромеханические характеристики синхронных машин. Уравнение движения и инерционная постоянная СМ.
γ – механический угол положения ротора, имеет полный период (град, радиан) в зависимости от количества полюсов. δ - электрический угол положения ротора (Т=360 град)
γ-угол между условным положительным направлением МО «А» осью d. δ- угол между Uc и Eq
Eq-поперечная синхронная ЭДС (сонаправлена с осью q).
2 2
3 ; d
2 dt
d 2 dt
d d à ñ dt dt
4. Условия работы синхронного генератора в простейшей одномашинной системе.
1). СГ может работать автономно, т.е. только на некоторую нагрузку или может выдавать энергию в некоторую систему бесконечной мощности.
2). Существует три модели СГ:
1. СГ без АРВ
2.СГ с АРВ ПД
3.СГ с АРВ СД
При наличии регулирования предел передаваемой мощности возрастает(т.к. сопротивление падает).
3). В устойчивом установившемся режиме работы система должна обладать некоторым запасом устойчивости, который определяется величиной:
kP Pï ð P0 100%
P0 |
, где kP – коэффициент запаса по мощности. |
|
|
Величина kP нормируется: |
|
-в нормальных условиях работы не менее 20% -в утяжеленных режимах(при неблагоприятном сочетании ремонтов основного оборудования) не менее 20%
-в вынужденных режимах допускается снижение kP до 8%.

5. Векторная диаграмма в простейшей электрической системе и вытекающие из нее соотношения. Рассмотрим схему ЭС:
|
|
|
|
|
|
|
|
|
U |
|
|
|||
E |
|
U |
c |
x |
|
I sin 2 x |
I cos 2 |
|
c |
|
||||
|
Q |
|
|
|
q |
|
q |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P xq |
|
|
|
|
|
|
|
|
|
arctg |
|
|
|
|
|
|
|
|
|
|||
|
|
Q x |
|
|
|
|
|
|||||||
|
o |
|
|
|
U 2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
c |
|
q |
|
|
|
|
|
|
Q x |
2 |
|
P x |
|
q |
|
|
q |
|
Uc |
Uc |
|||
|
|
2
6. Угловые характеристики СГ при синхронной скорости вращения ротора и их анализ. |
||||||||||
P Eq , ÑÌ |
áåç ÀÐÂ |
|
|
|
|
|
|
|||
|
|
E U |
2 |
|
1 |
|
1 |
|
||
1) P Eq , |
|
q |
c |
sin |
Uc |
|
|
sin 2 |
||
|
x |
|
|
|
x |
|||||
|
|
2 |
x |
|
|
|||||
|
|
d |
|
|
|
|
q |
|
d |
|
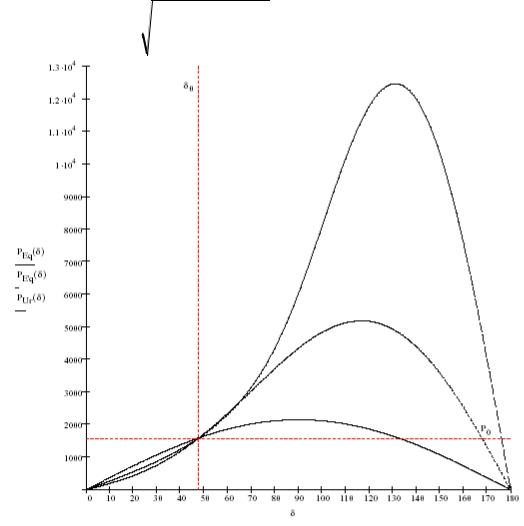
Помимо основной синус-сотавляющей характеристика мощности имеет также вторую составляющую двойной частоты,
амплитуда которой пропорциональна разности индуктивных сопротивлений в продольной и поперечных осях машины и не зависит от ЭДС Eq. Вторая гармоника смещает максимум характеристики влево. Это обстоятельство не стоит рассматривать как ухудшение устойчивости, так как одновременно уменьшается и δ0 при том Po.
|
E' U |
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
||||
2) P Eq' , |
|
q |
|
c |
|
sin |
Uc |
|
|
|
|
|
|
sin 2 |
|
|
|
|
|
|||||||||
|
x ' |
|
|
|
|
|
x ' |
|
|
x |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
d |
|
|
|
|
|
|
|
|
|
|||||||
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
||||||
3) P U Ã , |
U U |
c |
|
|
|
x U |
c |
|
|
|
2 |
|
|
U 2 |
|
1 |
|
1 |
|
|||||||||
|
à |
|
|
|
1 |
d |
|
|
sin |
sin |
c |
|
|
|
|
sin 2 |
||||||||||||
|
x |
|
|
|
x |
|
U |
|
|
2 |
|
x |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
à |
|
|
|
|
|
|
x |
|
|
|||||||||
|
ñ |
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
c |
|
q |
||||||||
7)Синхронная машина в сложной электрической системе. Собственные и взаимные сопротивления и проводимости СМ.
P |
EU |
sin |
|
|
|
||
|
xc |
справедлива для простейшей схемы электропередачи. Однако чаще связь между генератором и системой |
|
|
|
|
|
представлена ПОСТОЯННЫМИ активными и реактивными сопротивлениями. Для определения токов и напряжений воспользуемся методом наложения режимов, создаваемых каждой ЭДС или напряжением действующим в
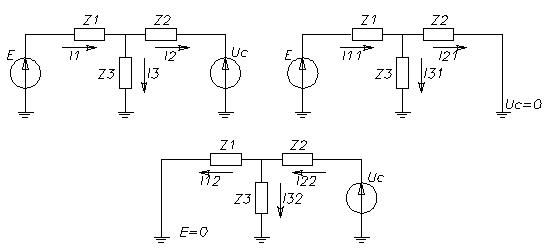
цепи. Для Т-образной схемы замещения в начале которой приложена ЭДС генератора E, а в конце – напряжение ШБМ Uc,
можно представить режим работы электропередачи как результат наложения друг на друга двух независимых режимов:
1)Токи создаются ЭДС при U=0
2)Uс при Е=0
Налагая точки и напряжения этих двух режимов друг на друга, получим I и U действительного режима электропередачи.
I1 I11 I12
I2 I21 I22
Для генератора считаются положительными ток и мощность, отдаваемые в сеть, для системы – получаемые.
Отдельные составляющие токов генератора и приемной системы пропорциональны соответствующим ЭДС и напряжению.
I |
|
E |
|
|
|
I |
|
|
U |
|
|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
|
||||||
11 |
|
z11 |
|
|
|
|
z22 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
z11 |
z1 |
|
z2 z3 |
|
|
|
z22 |
z2 |
|
z1z3 |
|||||
z2 |
z3 |
|
|
z1 |
z3 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
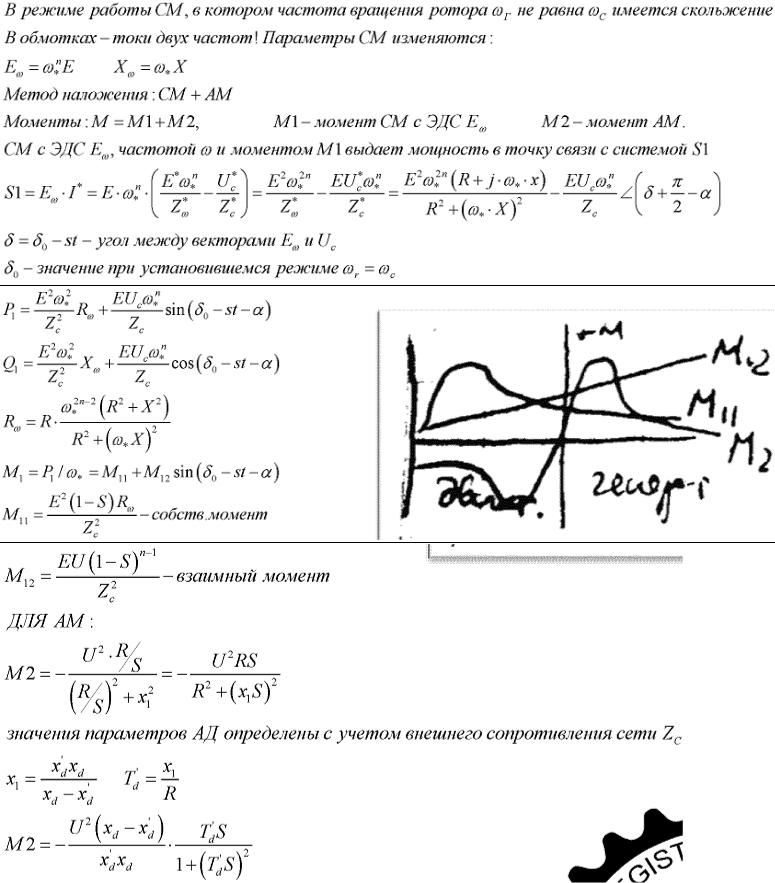
9)Условия работы СМ в простейшей системе при скорости отличной от синхронной. Понятие асинхронного режима. Применение метода наложения. Синхронный и асинхронный моменты СМ.