

Шпоры готов
.1.pdf20. Энергетические соотношения, характеризующие движение ротора СГ при «больших» возмущениях.
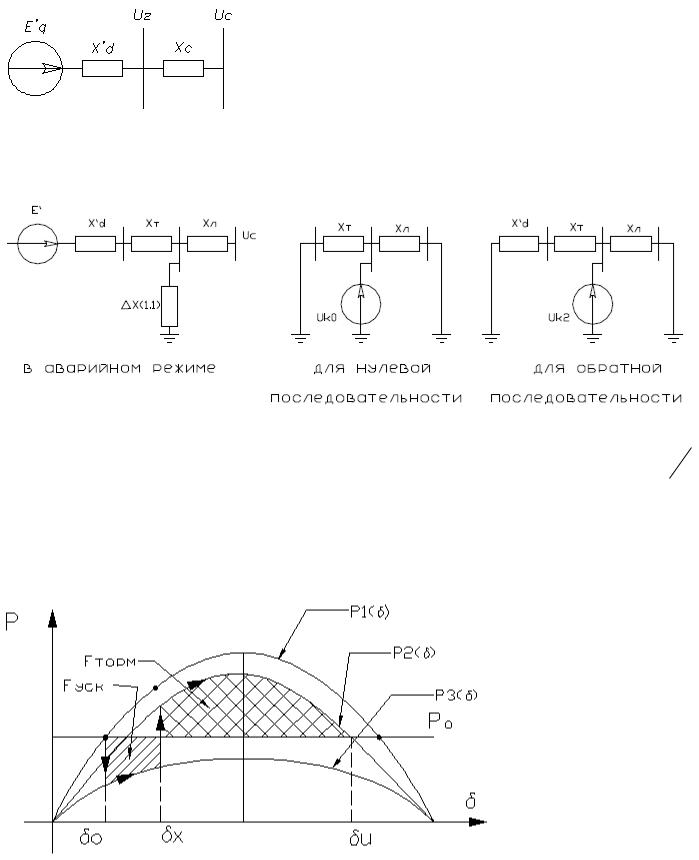
Рассмотрим простейшую одномашинную электрическую систему (А). Ее упрощенная схема замещения изображена на рисунке Б.
Математическая модель, описывающая поведение электрической системы, состоит из уравнения движения ротора и уравнений связи:
|
|
d 2 |
P k; |
P P P ( ); |
P ( ) |
E |
Г |
U |
C |
; |
X |
|
X |
|
X |
|
; |
|
||||||||||||||
|
|
|
|
|
|
|
Г |
|
|
|
||||||||||||||||||||||
|
j |
dt2 |
|
|
|
|
T |
|
|
Г |
Г |
X Г |
|
|
|
|
Г |
|
|
C |
|
|
|
|||||||||
P |
const; |
(t) E |
|
,U |
|
|
, |
где k |
2 f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Г |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Т |
|
|
|
|
|
|
|
SH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Режим 1: PТ= PТ0, δ= δ0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Режим 2: PТ= PТ1, δ= δS-устойчивок равновесие, δ= δU-неустойчивое равновесие. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Учитывая, что |
d |
|
d 2 |
d |
уравнение движения примет вид: |
|
d |
P k . |
||||||||||||||||||||||||
dt |
dt2 |
j |
dt |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Проинтегрируем обе части по t и введем замену: dt |
|
d |
, тогда j d P( ) k |
d |
|
|||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
t |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Нужно ввести новые пределы: интегрирование выполняеся от начального состояния до некоторого произвольного во
времени, что соответствуетдипазону по скорости от 0 до |
, и по углу от 0 |
до .: |
||||||||||
|
s |
|
|
|
|
|
2 |
|
2 |
s |
s |
|
j |
d |
P( ) kd P( ) kd j |
|
|
0 |
P( ) kd P( ) kd |
||||||
2 |
||||||||||||
0 |
0 |
s |
|
|
|
2 |
0 |
|
||||
|
|
|
|
|
|
|||||||
Кинетическая энергия: K ( ) |
|
|
2 |
|
|
|
|
|
||||
j |
|
. |
|
|
|
|
|
|||||
2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||
S
Потенциальная энергия: A( ) P( ) kd .Полная энергия: V K кон Акон K нач Анач const - нет рассеяния,
потерь. Система консервативная. Переходный процесс начинается в установившемся режиме, т.е. из состояния δ0, Δω=0. Однако РТ1-РГ>0, следовательно ротор начнет ускоряться, будут расти δ и Δω. В точке δS вся энергия перешла в
кинетическую. Относительная скорость в этой точке будет максимальна: |
|
2V / |
j |
. После точки δS |
Р(δ) меняет |
max |
|
0 |
|
|
знак, т.к. меняет знак ускорение. Ротор начинает тормозиться, хотя за счет накопленной кинетической энергии движение будет продолжаться в сторону увеличения угла и уменьшения Δω. В точке δ1 Δω=0, следовательно вся энергия перешла в потенциальную. Однако РТ1-РГ<0, т.е. действует тормозящая сила и имеется отрицательное ускорение. Ротор начинает движение в сторону меньших углов с возрастающей по модулю Δω<0.
Если кривая Δω(δ) замкнута, то угол и скорость изиеняются в ограниченном диапазоне и динамический переход устойчив. Но если в начальный момент времени энергия V>Vгр окажется больше некоторого значения, то при движении от точки δS энергия не успеет перераспределиться из кинетической в потенциальную, и после преодоления угла δU начнется разгон ротора и произойдет проворот ротора относительно поля статора.
Предельному динамическому переходу соответствует кривая, проходящая через точку δU. Энергия, соответствующая этой кривой называется граничной энергией. Граничная энергия может быть определена как потенциальная энергия в точке δU. Граничная кривая в пространстве выделяет область допустимых возмущений.
Если модеь электрической системы не консервативная, то колебания параметров во время переходного процесса будут носить затухающий характер по мере рассеяния энергии.

A |
? |
21. Метод площадей. Определение предельного допустимого отключения повреждения по правилу площадей. Определение предельного времени отключения трехфазного к.з.
Для описания динамического перехода возьмем простейшую одномашинную систему с АРВ ПД.
1) НР. |
|
|
|
|
|
|
|
|
|
|
X ' |
X |
|
|
P ( ) |
E' |
U |
|
sin |
X ' |
|
; |
q |
|
C |
||||
|
|
|
|
||||||
d |
d |
|
C |
|
1 |
X d' |
|
|
|
2)АР (КЗ(n)) применяем метод симметричных составляющих.
X2 Xd' |
XT // |
X Л ; |
X0 XT //(k X Л ) |
k зависит от проводящего троса. |
|
|||||||||||||
X (1) |
X0 X2 ; |
X (1,1) |
X0 // X 2 ; X (2) |
X 2 ; |
X (3) 0; |
X d' 2 X d' |
XT X Л X d' |
XT X Л X (n) |
||||||||||
|
|
|
|
|
|
|
|
P ( ) |
E' |
U |
|
sin |
|
|
|
|
||
Если предположить, что E’q=const, то |
|
q |
|
C |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
(2) |
|
X d' 2 |
|
|
|
|
|
|
||
3)ПАР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X ' |
X ' |
X |
|
|
P ( ) |
Eq' UC |
sin ; |
|
180 arcsin |
|
P |
|
|
|||||
|
; |
|
|
|
0 |
|
|
|
||||||||||
|
X ' |
|
P |
|
|
|||||||||||||
d 3 |
d 3 |
|
C 3 |
|
1 |
|
|
|
U |
|
|
|
|
|
||||
|
|
|
|
|
|
|
d3 |
|
|
|
|
|
|
|
3max |
|
|
|

По возникновении к.з. появляется положительный небаланс ∆P(δ0)>0 на валу, генератор разгоняется и угол увеличивается. По истечении времени tоткл, равного выдержке времени РЗ и выключателя, отключается поврежденный элемент. Система практически мгновенно переходит в послеаварийный режим.Небаланс на валу меняет знак. Начинается торможение ротора, но движение по инерции продолжается в сторону увеличения угла. Если рассматривать предельный переход, то ротор в точке δU будет иметь синхронную скорость. Затем начинается движение в сторону уменьшения угла по характеристике ПАР.
Можно сделать вывод, что на отрезке от δ0 до δX СМ ускорялась и запасала энергию Vу. На отрезке δX до δU СМ nтормозилась расходовала энергию VT. По определению потенциальная энергия это интеграл от ∆P(δ0) по углу, то есть соответствующие плошадки.
x |
|
FУСК P0 P2 sin( ) d P0 X 0 P2 (cos X cos 0 ) МВт рад |
|
0 |
|
u |
sin( ) P0 d P3 (cos U cos X ) P0 U X МВт рад |
FТОРМ P3 |
|
x |
|
FУСК FТОРМ |
- неустойчивый режим |
FУСК FТОРМ |
- устойчивый режим |
FУСК FТОРМ |
- предельный режим |
Найдем предельный угол отключения к.з.
P0 X 0 P2 |
(cos X |
cos 0 ) P3 |
|
(cos U cos X ) P0 U X |
||||||||
cos X P3 P2 P0 |
U |
0 P2 cos |
0 P3 cos U |
|||||||||
|
P |
|
|
|
P cos |
|
P cos |
|
|
|||
XПР arccos |
0 |
|
U |
|
0 |
2 |
0 |
|
|
3 |
U |
|
|
|
|
|
|
P3 P2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Предельное время отключения трехфазного к.з.: P2 sin 0
j d 2 k P dt2
j d 2 k P0dt2
j XПР 0 k P0 tXПР / 2

22.Исследование динамической устойчивости простейших моделей ЭЭС на основе численного интегрирования уравнения движения. Теоретические основы метода последовательных интервалов. Применение метода последовательных интервалов к расчету динамической устойчивости простейшей и сложной систем.
Проанализировать динамическую устойчивость достаточно просто, если известна траектория возмущенного движения
электрической системы. Получение траектории движение ознасает решение ДУ движения j d 2 k P . dt2
Аналитическое решение этого уравнения невозможно, так как в него входит нелинейная функция РГ(δ). Однако можно воспользоваться методом численного интегрирования.
Т – интервал интегрирования. ∆t – шаг интегрирования.
Ускорение определяется на границе каждого интервала. Перемещение определяется на границе интервала.
Перемещение определяется на границе интервала.
1 шаг
0 t t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P |
0 |
P P ( |
0 |
); |
|
|
1 |
|
0 |
a t 2 |
||||||||||
|
|
|
|
|
0 |
|
2 |
|
|
|
|
|
|
|
|
|
||||
a P |
k |
|
(из уравнения движения ротора) |
|||||||||||||||||
|
j |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k t2 |
|
|
|
|
|
|
|
k t 2 |
||||
|
1 |
|
0 |
|
|
|
|
P( |
0 |
); |
|
|
|
K const |
||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
2 j |
|
|
|
|
|
|
|
j |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 0 1; |
1 |
|
1 |
|
|
|
|
|||||||||||||
t |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 шаг
t t 2 t
2 1 K P0 P2 1
n шаг (угол отключения к.з.)
t t 2 t
n n1 K P0 P2 n 1 P0 P3 n 1
2
Для сложной системы из n машин:
Модель СМ: постоянная ЭДС. Механические мощности турбин постоянны. Математическая модель одной СМ:
|
|
|
d 2 i |
|
P P |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
ji |
|
dt2 |
Ti |
Гi |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
n1 |
|
|
|
|
PГi Ei2 Yii |
sin ii |
Ei Ek Yik sin i k ik , |
i |
1, n |
|
|||||||
k 1 k i

1)Определяются параметры схемы замещения, собственные и взаимные проводимости и дополнительные углы. 2)Рассчет установившнгося режима. Из него берутся 0 , P( ) .
При изменении узловой мощности |
|
k |
Pi(1) |
; |
|
|
|
|
|
|
i(1) |
|
i(1) |
i0 |
i(1) |
||||||
|
i |
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Далее расчет по известному алгоритму. Получаем зависимости δi(t).
Критерием нарушения динамической устойчивости для сложной динамической системы является достижение разности по связи между углами 180 δi и δj 180 градусов.
23.Определение коэффициента запаса статической устойчивости по напряжению, его физический смысл. Статическая и динамическая устойчивость асинхронной двигательной нагрузки.
kU – коэффициент запаса статической устойчивости по напряжению kU U0 U КР 0,15 .
U0
UКР: 1)точное определение 2)паспортная величина 3)примерное определение
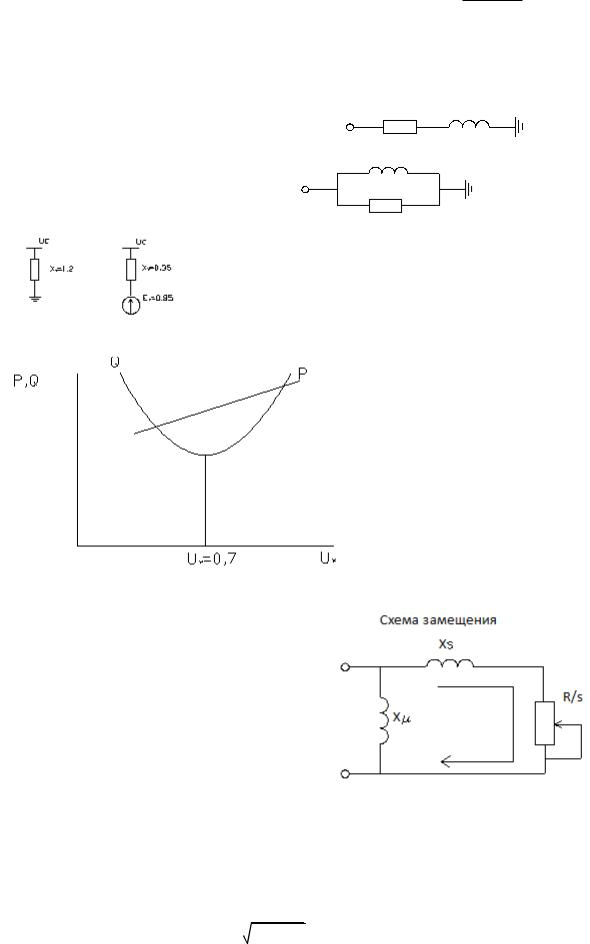
Схемы замещения нагрузки:
1) |
Z |
|
R |
jX |
|
; Z |
|
|
|
Uc |
2 |
cos |
|
j sin |
|
|
|||
H |
H |
H |
|
|
|
H |
H |
||||||||||||
|
|
|
H |
|
|
|
|
|
|
SH |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2) |
R |
UC2 |
; X |
|
|
UC2 |
|
|
|
|
|
|
|
|
|
||||
|
H |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
H |
|
PH |
|
|
|
QH |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3)
4)Статические характеристики нагрузки.
Устойчивость АД. Статическая устойчивость.
X |
|
X |
|
; |
|
|
P I 2 |
R |
|
|
|
|
|
|
||||||||||||||
|
S |
s |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2 |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U0 |
|
|
|
|
|
|
|
|
U02 R s |
|
|
|||||||||||
P |
|
|
|
|
s |
|
|
|
|
|
|
; |
||||||||||||||||
|
R 2 |
|
|
|
2 |
|
R2 X s s 2 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
X s |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
P |
|
|
|
|
R2 X s s 2 |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
0 sКР |
||||||||||||||||||||||
s |
R2 X s s 2 2 |
|||||||||||||||||||||||||||
R2 X |
|
s 2 |
0; |
|
|
s |
|
|
|
R |
; |
|
||||||||||||||||
s |
|
|
КР |
X |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U 2 R |
|
R |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|||||||||||
P |
|
|
|
|
|
|
0 |
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
U КР |
|||||||
|
R |
2 |
|
|
X |
|
R 2 |
2 X |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
||||
Q Q Qs

 2 X P0
2 X P0
Статически устойчивая область: 0<s<sкр
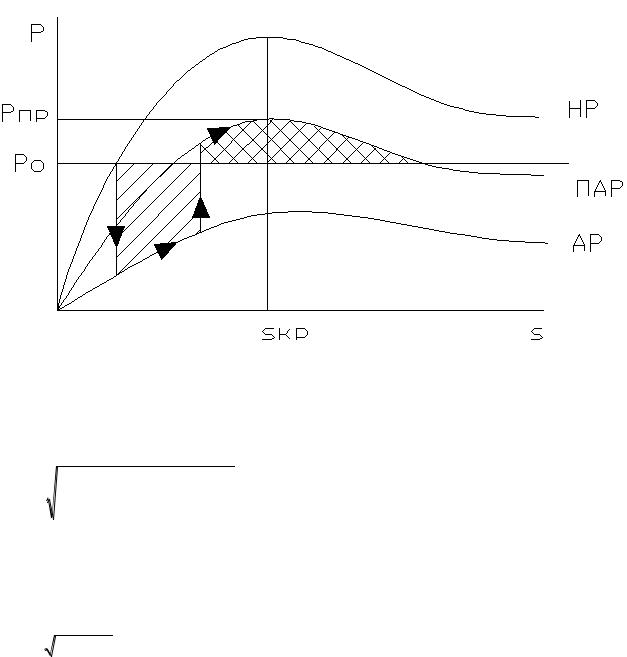
Анализ динамической устойчивости (тот же рисунок).
|
P0 P0* PH ; |
Q0 P0 tg H |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Q0 XC |
|
|
2 |
|
P0 X |
2 |
|
|
|
|
||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
UC |
|
U0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
U0 |
|
|
|
U0 |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U 4 |
2 Q X |
C |
U |
2 |
U 2 |
|
Q X |
C |
2 P X |
C |
2 0 U |
0 |
|||||||||||||||||
0 |
|
|
|
|
0 |
|
|
C |
|
|
|
0 |
|
0 |
|
0 |
|
||||||||||||
|
M max |
дано! |
|
|
|
|
X |
|
|
|
|
|
|
U02 |
|
|
|
|
сопротивление рассеяния. |
||||||||||
|
|
|
|
|
|
S |
|
|
|
|
|
M max |
|
||||||||||||||||
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
ном |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 PН M ном |
|
|
|
|
|||||||
UКР |
2 P0 |
X S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
kU |
|
|
U0 U КР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
U0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
24.Мероприятия по улучшению устойчивости и качества переходных процессов.
1.Основные мероприятия (нацелены на изменение параметров основного силового оборудования) – изменение сопротивления, инерционной постоянной, коомутационных аппаратов, системы возбуждения. 2.Дополнительные мероприятия (РЗ, автоматика).
3.Режимные мероприятия (определяются режимом работы оборудования).
Основные мероприятия.
- |
|
d 2 |
k P( ); |
PПР |
E UC |
||
j |
dt |
2 |
X |
||||
|
|
|
|||||
|
|
|
|
|
|||
τj – увеличение устойчивости, но дорого стоит.
- k |
2 f |
- объединение на параллельную работу (увеличение устойчивости). |
|
||
|
PH |
|
-Изменение сопротивления линий (уменьшение).
-Увеличение класса напряжения для увеличения предела передаваемой мощности. -Использование трансформаторов с расщипленной обмоткой.
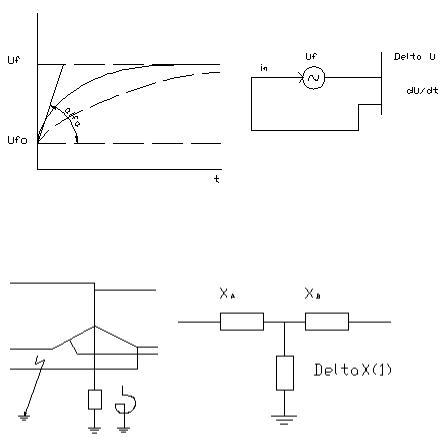
-Повывение скорости изменения «потолка» врзбуждения:
α близак к 90,его тангенс 6-8 единиц.
-Снижение времени отключения коммутационных аппаратов. Дополнительные меропроятия.
-Установка различных устройств в нейтраль трансформаторов и автотрансформаторов. Ток к.з. в нейтрали в 3 раза превышает ток в каждой из фаз.
X (1) X0 X2 . При установке реактора X 0 увеличивается, а значит и X увеличивается.
X (1) |
X |
|
X |
|
|
X A X B |
. PПР |
EГ UC |
|
|
A |
|
B |
|
X |
X (1) |
|
|
|
|
|
|
|
|
|
|

-Применение электрического торможения для СМ (СГ,СД,СК).
Чтобы не дать ротору разогнаться, применяют электрическое торможение
a |
|
X |
показывает уменьшение апериодической составляющей. |
|
|
||||
R |
||||
|
|
|
- Контруирование более гибких регуляторов турбин. Прежде всего – ГЭС.
Регулятор турбины уменьшает Po и исскусственно увеличивает площадку торможения.
Режимные мероприятия.
- Правильное формирование нормальной электрической схемы системы и ее топологии.
Предел передаваемой мощности для классов 220 и 500 КВ Ограничен условиями устойчивости, а 110 кВ по максимальному Току.
Ограничен условиями устойчивости, а 110 кВ по максимальному Току.
Эти связи не должны существовать параллельно, так как у низкого класса напряжения меньше сопротивление и по этой линии потечет большая нагрузка.
- Обесп резервов по активной и реактивной мощностям.
-Деление энергосистемы на несинхронноработающие части.