

2.3 Методы численной реализации модели
Электронно-конформационное состояние RyR-канала описывается стохастическим дифференциальным уравнением (2.7) со случайным изменением правой части и с переключением вследствие электронных и туннельных переходов (2.8, 2.10).
В
формулах (2.4, 2.5) переменная
![]() электронного состояния является
дискретной и принимает два значения: 0
(электронно закрытое) и 1 (электронно
отрытое состояние). Слагаемое
электронного состояния является
дискретной и принимает два значения: 0
(электронно закрытое) и 1 (электронно
отрытое состояние). Слагаемое![]() в уравнении (2.7) отвечает за аддитивные
шумы в виде случайного винеровского
процесса. Таким образом, компьютерная
реализация ЭК модели должна быть основана
на численных методах интегрирования
стохастических дифференциальных
уравнений и методах реализации марковских
процессов. Сочетание этих методов
позволило построить две численные схемы
для получения наборов реализаций.
в уравнении (2.7) отвечает за аддитивные
шумы в виде случайного винеровского
процесса. Таким образом, компьютерная
реализация ЭК модели должна быть основана
на численных методах интегрирования
стохастических дифференциальных
уравнений и методах реализации марковских
процессов. Сочетание этих методов
позволило построить две численные схемы
для получения наборов реализаций.
2.3.1 Метод Эйлера-Марайамы
Наиболее известным методом решения дифференциальных уравнений со случайными членами является явный метод Эйлера, обобщенный для стохастических уравнений Марайамой (Maruyama) в 1955 году, поэтому этот метод иногда называют методом Эйлера-Марайамы [114, 115].
Стохастическое
дифференциальное уравнение Ито,
описывающее изменение со временем
некоторой переменной
![]() ,
имеет вид [115]:
,
имеет вид [115]:
![]() , (2.29)
, (2.29)
Пусть
оно задано на интервале времени [0; T]
с начальными условиями
![]() ,
где
,
где![]() и
и![]() – измеримые функции, а
– измеримые функции, а![]() отвечает за винеровский процесс. Данный
интервал времени можно дискретизировать
с шагом
отвечает за винеровский процесс. Данный
интервал времени можно дискретизировать
с шагом![]() ,
гдеL
– число шагов на выбранном интервале.
Дискретный набор моментов времени на
интервале обозначается как:
,
гдеL
– число шагов на выбранном интервале.
Дискретный набор моментов времени на
интервале обозначается как:
![]() ,
,![]() – приближенное решение уравнения (2.29)
на каждомi-ом
шаге.
– приближенное решение уравнения (2.29)
на каждомi-ом
шаге.
Согласно схеме Эйлера-Марайамы решение на последующем шаге находится как:
![]() , (2.30)
, (2.30)
где
![]() – приращение винеровского процесса,
для которого справедливо соотношение
[115]:
– приращение винеровского процесса,
для которого справедливо соотношение
[115]:
![]() ,
,
где
![]() – нормально распределенная случайная
величина с нулевым средним и единичной
дисперсией. С учетом этого схема метода
принимает вид:
– нормально распределенная случайная
величина с нулевым средним и единичной
дисперсией. С учетом этого схема метода
принимает вид:
![]()
где
![]() - нормально распределенная случайная
величина (N(0,1)),
вычисленная методом Монте Карло на i-ом
шаге интегрирования системы уравнений.
- нормально распределенная случайная
величина (N(0,1)),
вычисленная методом Монте Карло на i-ом
шаге интегрирования системы уравнений.
Если
обозначить скорость изменения координаты
Q
как
![]() ,
то для уравнения Ланжевена (2.7) в ЭК-модели,
описывающего изменение конформационной
координаты RyR-канала, метод Эйлера-Марайамы
имеет вид:
,
то для уравнения Ланжевена (2.7) в ЭК-модели,
описывающего изменение конформационной
координаты RyR-канала, метод Эйлера-Марайамы
имеет вид:
 (3.31)
(3.31)
2.3.2 Реализация электронных и туннельных переходов. Метод Монте-Карло
Электронные и туннельные переходы в ЭК-модели можно представить в терминах дискретного марковского процесса с различными вероятностями переходов между состояниями марковской цепи. Для описания случайных марковских процессов обычно используют метод Монте-Карло, который заключается в применении генератора псевдослучайных чисел для моделирования случайного процесса переходов между состояниями.
Простейшим способом
описания инактивационного состояния
является введение новой переменной μ,
принимающей
два значения: μ=1,
если канал инактивирован, μ=0
в остальных случаях. Если ввести функцию
Хэвисайда
 ,
то с учетом новой переменной адиабатический
конформационный потенциал (2.4) имеет
следующей вид:
,
то с учетом новой переменной адиабатический
конформационный потенциал (2.4) имеет
следующей вид:
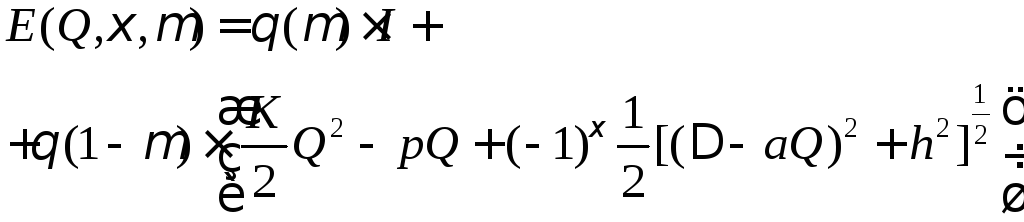 , (2.32)
, (2.32)
где
![]() – энергия инактивационного состояния.
– энергия инактивационного состояния.
Диабатический конформационный потенциал (2.5) может быть описан следующей формулой:
 . (2.33)
. (2.33)
Для инактивационного состояния, была введена новая переменная μ.
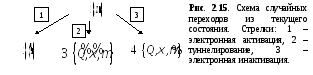
Рассмотрим
состояние канала 1:
![]() в определенный момент времени
в определенный момент времени
![]() .
В следующий момент времени
.
В следующий момент времени![]() система может оказаться в состояниях
2:
система может оказаться в состояниях
2:
![]() или 3:
или 3:
![]() или 4:
или 4:
![]() (рис. 2.15).
(рис. 2.15).
Предполагается,
что потоки событий электронных и
туннельных переходов между состояниями
являются пуассоновскими. Опираясь на
это предположение, дискретизируем
марковский процесс с таким малым шагом
по времени
![]() ,
что за этот промежуток времени может
произойти только одно событие перехода.
,
что за этот промежуток времени может
произойти только одно событие перехода.
На каждом шаге интегрирования случайного процесса вероятности туннельного, электронного перехода между ветвями КП и вероятность перехода в инактивационное состояние определялись следующим образом:
 (3.34)
(3.34)
Так
как события туннельных и электронных
переходов являются независимыми, то
вероятность покинуть состояние 1 за
время
![]() равна
равна![]() .
.
Однако для построения цепи нужно знать еще вероятности переходов в «состояние 2» и «состояние 3» при условии, что канал покинет «состояние 1». Эти вероятности могут быть вычислены по следующим формулам:
 (2.35)
(2.35)
В
данной работе предполагается, что при
осуществлении быстрых переходов не
происходит изменения конформационной
координаты по уравнению Ланжевена.
Медленная конформационная динамика в
течение промежутка времени
![]() реализуется только в отсутствии быстрых
переходов.
реализуется только в отсутствии быстрых
переходов.
На
основе сделанных предположений была
получена марковская цепь, которая
реализовывалась с помощью метода
Монте-Карло. В рамках этого метода
нормально распределенная случайная
величина
![]() задается наi-том
шаге реализации процесса в момент
времени
задается наi-том
шаге реализации процесса в момент
времени
![]() на отрезке [0,1] и сравнивается с вычисленной
вероятностью электронных переходов
между ветвями КП. Если выполняется
условие
на отрезке [0,1] и сравнивается с вычисленной
вероятностью электронных переходов
между ветвями КП. Если выполняется
условие![]() ,
реализуется электронный переход между
ветвями КП. В ином случае определялась
следующая случайная величина
,
реализуется электронный переход между
ветвями КП. В ином случае определялась
следующая случайная величина![]() ,
которая сравнивалась с условной
вероятностью туннельного перехода. По
аналогии с предыдущим случаем, если
,
которая сравнивалась с условной
вероятностью туннельного перехода. По
аналогии с предыдущим случаем, если![]() ,
то реализуется туннельный переход, в
другом случае определяется случайная
величина
,
то реализуется туннельный переход, в
другом случае определяется случайная
величина![]() .
При
.
При![]() моделируется инактивационный переход,
в противном случае вычисляется
конформационная координата на текущем
шаге по уравнению Ланжевена.
моделируется инактивационный переход,
в противном случае вычисляется
конформационная координата на текущем
шаге по уравнению Ланжевена.
Повторяя
описанную процедуру
![]() раз, гдеТ
– длительность эксперимента, и вычисляя
конформационную динамику на отрезках
раз, гдеТ
– длительность эксперимента, и вычисляя
конформационную динамику на отрезках
![]() ,
на которых отсутствуют переходы, можно
получить одну реализацию случайного
процесса, которая является приближением
исходного марковского процесса
электронных и туннельных переходов.
,
на которых отсутствуют переходы, можно
получить одну реализацию случайного
процесса, которая является приближением
исходного марковского процесса
электронных и туннельных переходов.