

Возможны следующие варианты:
Число неизвестных меньше, чем число уравнений n m.
например: 2x1=4, в этом случае n=1;
x1=5, тогда m=2 (число линейно независимых уравнений). (4.4)
Очевидно, что система (4.4) решения не имеет, и она несовместна;
Число неизвестных равно числу уравнений n=m.
В этом случае система имеет единственное решение или не имеет ни одного. Заметим, что m равно числу линейно независимых уравнений.
Для системы: 2x=10, n=1, m=1;
x=30.
Если число неизвестных больше числа уравнений, то система имеет бесчисленное множество решений. Пусть n m. Например:
2x1+x2=2 (4.5)
Очевидно, что это уравнение прямой, и все значения x1 и x2, лежащие на этой прямой, являются решением уравнения (4.2). Значит уравнение (4.5) имеет бесчисленное множество решений.
В случае, когда система имеет больше одного возможного решения, может быть поставлена задача оптимизации, суть которой в том, что из всех допустимых решений, удовлетворяющих ограничениям и граничным условиям, выбрать такое, которое придает целевой функции оптимум. Вспомним построение линейных зависимостей. Пусть дано уравнение:
a1x1+a2x2=b (4.6)
Преобразуем его к виду:
 (4.7)
(4.7)
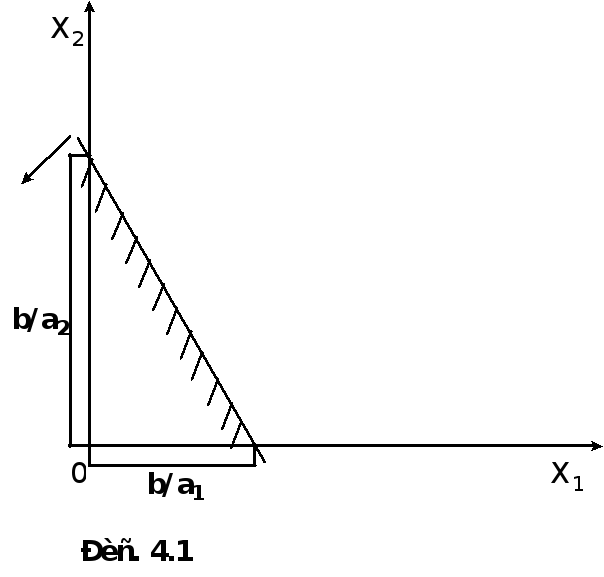
Запись (4.7) называют уравнением прямой в отрезках, что изображено на Рис. 4.1. Рассмотрим еще одну форму представления уравнения (4.6). Запишем это уравнение в виде:
a2x2=b-a1x1
или
![]()
или
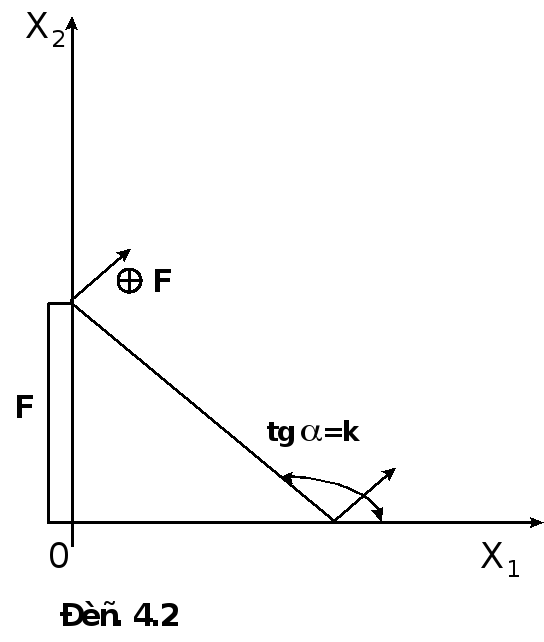
x2=F-kx1 (4.8)
Уравнение (4.8) изображено на рис. 4.2.
Вспомним неравенства. Если линейное уравнение с двумя переменными может быть представлено в виде прямой на плоскости, то неравенство вида:
a1x1+a2x2 b (4.9)
изображается как полуплоскость, показанная на рис. 4.1. На этом рисунке часть плоскости, удовлетворяющая неравенству, заштрихована. Координаты всех точек, принадлежащих заштрихованному участку, имеют такие значения x1 и x2, которые удовлетворяют заданному неравенству. Значит, эти значения составляют область допустимых решений (ОДР). Саму прямую считаем принадлежащей каждой из двух указанных полуплоскостей. Предположим теперь, что задано не одно неравенство, а система:
а11x1+а12x2 b1
а21x1+а22x2 b2
(4.10) ... ... ... ...
аm1x1+аm2x2 bm,
где первое неравенство определяет некоторую полуплоскость П1, второе - полуплоскость П2 и т.д.
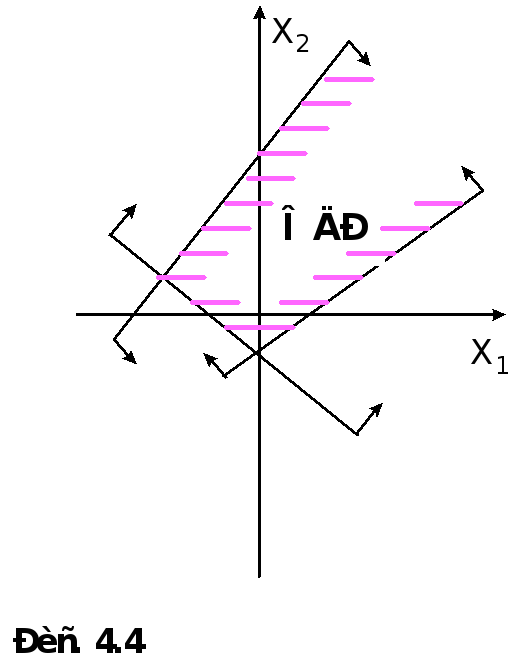
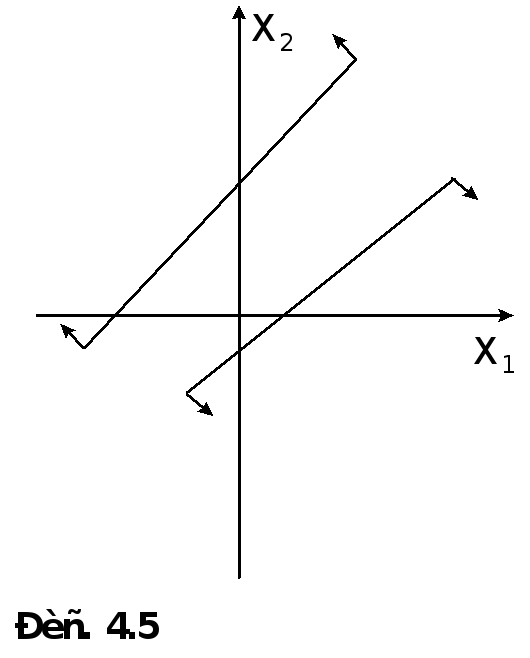
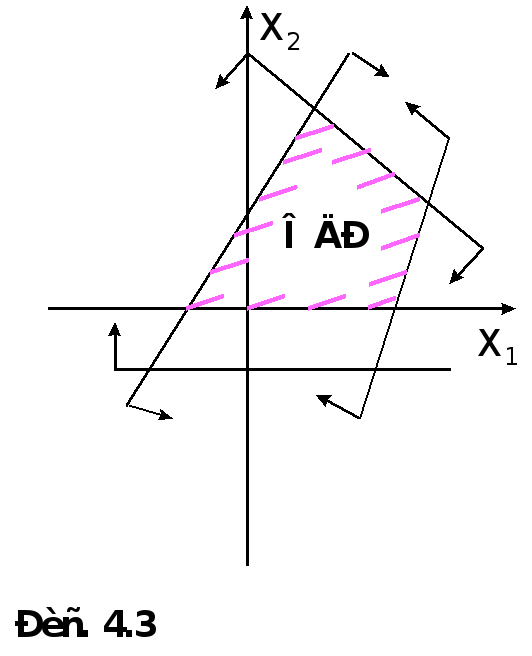
если какая-либо пара чисел (x1, x2) удовлетворяет всем неравенствам (4.10), то, соответствующая точка Р(x1, x2), принадлежит всем полуплоскостям П1, П2, ... Пm одновременно. Другими словами, точка Р принадлежит пересечению (общей части) полуплоскостей П1, П2, ... Пm, т.е. некоторой многоугольной области М (Рис. 4.3), которая является ОДР. Вдоль контура области изображены штрихи, идущие внутрь области. Они одновременно указывают, с какой стороны от данной прямой лежит соответствующая полуплоскость, то же самое указано и с помощью стрелок на каждой линии. Сразу же отметим, что ОДР не всегда бывает, ограничена: в результате пересечения нескольких полуплоскостей может возникнуть и неограниченная область (Рис. 4.4). Возможен и случай, когда область допустимых решений (ОДР) пуста. Это означает, что система (5.7) противоречива (Рис. 4.5). Многоугольник ОДР обладает весьма важным свойством: он является выпуклым.
В случае трех неизвестных, каждое уравнение представляет собой плоскость в пространстве. Каждая плоскость разбивает все пространство на два полупространства. Система неравенств определяет в пространстве выпуклый объемный многогранник, который представляет ОДР.