

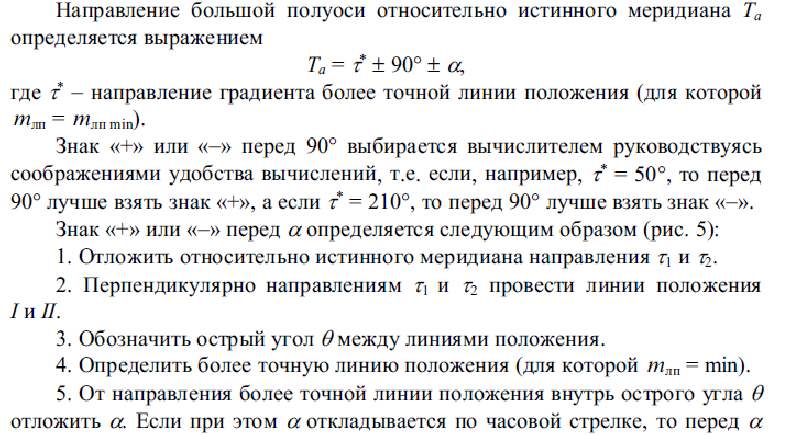
34)Обработка прямых неравно точных измерений. Погрешность функции измеренных величин.

35)Среднестатистические погрешности основных навигационных параметров (частная, повторяющаяся, полная)

36)Погрешность функции измеренных величин. Прогнозирование влияния систематической погрешности при омс по 2лп.


37)Фигура погрешности при оценки точности омс по 2лп.
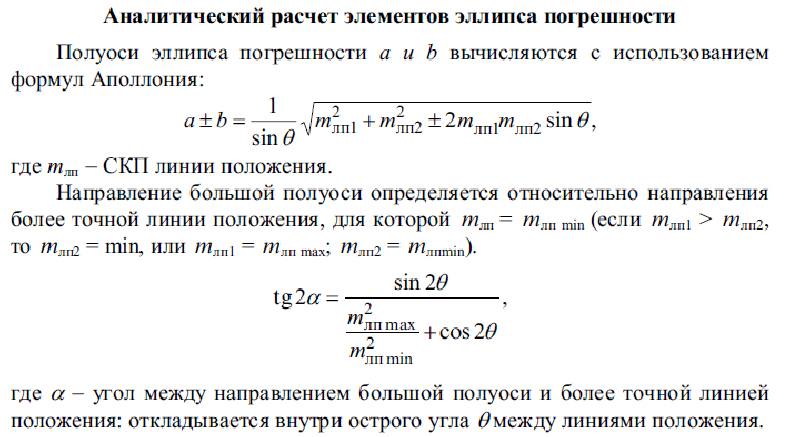
38)Вычисление элементов эллипса погрешности при омс по 2-м навигационным параметрам.

39)Среднеквадратическая (радиальная) погрешность.
Радиальная погрешность места судна
Для использования эллипса погрешностей необходимо рассчитать три элемента:
а, в и . Это обстоятельство усложняет расчеты и затрудняет сравнение двух или нескольких эллиптических погрешностей.
Более простой и удобной оценкой точности места судна может служить радиальная средняя квадратическая погрешность – радиус круга, проведенного относительно оцениваемого места, равный геометрической сумме главных полуосей среднего квадратического эллипса (рис 7).
 (12)
(12)

Замена эллипса погрешностей окружностью расширяет площадь нахождения истинного места и, следовательно, вероятность радиальной средней квадратической погрешности больше вероятности среднего квадратического эллипса погрешностей.
В МТ – 2000 есть таблица 4.13 «Вероятность радиальной погрешности». Она служит для определения вероятности Р нахождения места судна в круге заданного радиуса RР. Она рассчитана по формуле:
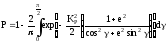 (13)
(13)
где  – коэффициент (нормированная радиальная
погрешность), равный
– коэффициент (нормированная радиальная
погрешность), равный
заданной радиальной
погрешности RР
в долях СКП места
 ;
;
 –отношение
полуосей (большой и малой) среднего
квадратического эллипса погрешностей;
–отношение
полуосей (большой и малой) среднего
квадратического эллипса погрешностей;
 – переменная
интегрирования (в угловых единицах)
– переменная
интегрирования (в угловых единицах)
Значения Р выбираются
из таблицы 4.13. по коэффициенту КР
и отношению полуосей
 .
Если а и в неизвестны, то выборки делают
по
.
Если а и в неизвестны, то выборки делают
по ,
что равнозначно выборкам из таблицы
4.15. При
,
что равнозначно выборкам из таблицы
4.15. При вероятности Р соответствуют данным
таблицы 4.7 для КР
= Z.
вероятности Р соответствуют данным
таблицы 4.7 для КР
= Z.
Решение обратной задачи по определению радиальной погрешности RР заданной вероятности выполняются по формуле
 (14)
(14)
где КР – коэффициент, выбираемый по вероятности Рзад обратным входом из таблицы 4.13 или же непосредственно из таблицы 4.14.
40)Общие принципы обработки косвенных измерений по методу наименьших квадратов.
В случаях, когда искомые величины(координаты судна, коэффициенты) непосредственно не измеряют, а определяют по измерениям других, связанных с ними величин(нав. Параметры),то такие определения называются косвенными и чаще всего встречаются в судовождении.Приведение невязок таких определений в формальное согласие называют уравнением косвенных определений. Для общности и краткости записи в уравнениях поправок принято обозначать первыми буквами латинского алфавита коэффициенты при неизвестных, а последними буквами алф.-сами неизвестные:а=g*cosτ; b=g*sinτ; x=дельтаφ;y=дельтаw;L=дельтаU; L-свободные члены.Получим уравнение поправок:a*x+b*y+c*z+L=v. Свободный членL-это разность между измеренным и вычисленными значениями измеряемой величины.В L входит вся ошибка измерений.