


Работа № 5. ОПРЕДЕЛЕНИЕ МОДУЛЯ ЮНГА ПО ПРОГИБУ
Цель работы: опытное определение модуля Юнга по прогибу.
Принадлежности: установка, микрометр, штангенциркуль, набор упругих пластин, линейка.
Вопросы, знание которых обязательно для допуска к выполнению работы
1.Что называется деформацией тела? Какие деформации называются упругими, какие неупругими?
2.Какие тела относятся к упругим, неупругим, пластическим?
3.Как формулируется закон Гука применительно к изгибу (прогибу)? Когда он справедлив?
4.Что такое напряжение? В каких единицах оно измеряется?
5.Что называется модулем Юнга, каков его физический смысл
ив каких единицах он измеряется? От чего зависит модуль Юнга?
6.Какая деформация называется однородной (неоднородной)?
7.Что называется абсолютной и относительной деформацией?
8.Какая нагрузка называется сосредоточенной (рассредоточенной)?
9.Как выражается энергия упруго деформированного тела?
10.Что называется пределом пропорциональности, упругости, текучести, прочности? Нарисуйте диаграмму напряжений.
11.Расскажите порядок выполнения работы.
ВВЕДЕНИЕ
Деформация представляет собой особый вид движения, а именно: перемещение частей тела относительно друг друга под действием внешней силы. При деформации тела меняют объем и форму.
Деформация называется упругой, если она полностью исчезает после прекращения действия деформирующих сил. Под действием внешней силы тела могут растягиваться, сжиматься, изгибаться, скручиваться и т.д. Пропорциональность между на-
57
грузкой и деформацией впервые была сформулирована Робертом Гуком в 1678 г.
Простейшим видом деформации является растяжение стержня длиной l под действием силы F. В результате действия силы стержень растянется на величину ∆l, называемую абсолютным удлинением. При неизменной F ∆l ~ l. Поэтому мерой деформации растяжения служит относительное удлинение ε = ∆l/l, которое измеряется в процентах. Противоположное направление силы приводит к деформации простого сжатия (рис. 1).
|
Упругое напряжение σ определяется величиной F/S, растя- |
||||
|
|
гивающей или |
сжимаю- |
||
|
|
щей силы, отнесенной к |
|||
|
|
единичной площади по- |
|||
|
|
перечного сечения стерж- |
|||
l |
|
ня: |
|
|
|
|
|
σ = F . |
|
|
|
|
|
|
|
(1) |
|
|
|
|
S |
|
|
|
S |
Естественно, в од- |
|||
∆l |
нородном стержне посто- |
||||
|
|
янного |
сечения величина |
||
|
|
σ будет постоянна вдоль |
|||
|
F |
всей длины стержня, поэ- |
|||
|
Рис. 1 |
тому |
каждый |
|
элемент |
|
длины |
стержня |
будет |
||
подвергаться одинаковому растяжению. |
|
|
|
||
|
Возникающее удлинение образца ∆l под действием внеш- |
||||
ней силы F пропорционально величине действующей силы, пер- |
|||||
воначальной длине l и обратно пропорционально площади попе- |
|||||
речного сечения S: |
|
|
|
|
|
|
∆l = F l |
l , |
|
|
(2) |
|
S |
E |
|
|
|
где E - коэффициент пропорциональности, называемый модулем |
|||||
упругости или модулем Юнга. Модуль Юнга характеризует уп- |
|||||
ругие свойства материала. |
|
|
|
|
|
|
Из (2) получаем выражение для Е: |
|
|
|
|
58

|
|
F |
|
|
σ . |
|
E = |
|
S |
= |
(3) |
||
|
∆l |
|
ε |
|
||
l
Из формулы (3) следует, что модуль упругости не зависит от формы и размеров деформируемого тела.
Модуль Юнга Е численно равен напряжению σ, вызывающему относительное удлинение ε образца, равное единице. При ε =1 начальная длина увеличивается в два раза. Однако разрыв образца наступает при значительно меньших напряжениях.
На рис. 2 приведен график зависимости σ = f(ε). Кривая 1 относится к пластическому телу; 2 - к хрупкому; 3 - к упругому.
σ=E 

|
|
3 |
σmax |
|
д |
σтек |
|
|
|
е |
|
|
б б’ с |
|
σпр |
|
|
1 |
О |
|
2 |
|
|
Рассмотримаход σ=f(ε) для упругого тела. Вначалеε с увеличе-
Рис. 2
нием нагрузки ε возрастает пропорциональность по σ (линейный участок графика aб). В этой области справедлив закон Гука. Наибольшее напряжение, соответствующее б, до которого сохраняется пропорциональность между ε и σ, называется пределом пропорциональности (σПР).
Точка б’ соответствует напряжению, до которого тело испытывает упругие деформации (предел упругости σУП). При напряжении больше σУП происходят неупругие (пластические) де-
59
формации, т.е. после снятия напряжения наблюдаются остаточные деформации. Если σ достигнет значения σТЕК, соответствующего точке с, материал начинает "течь" - длина его увеличивается без увеличения нагрузки. На стержне получается местное сужение (шейка). В результате этого σ несколько увеличивается (участок cд). Точке д соответствует предел прочности.
σmax - это максимальное напряжение, при котором еще не происходит разрушение материала. За этим пределом образец разрушается (точка e).
В данной работе модуль Юнга будем определять по прогибу. Поэтому этот вид деформации рассмотрим подробнее.
L |
L |
S |
S |
K=4 |
K=1/4 |
|
|
Рис. 3 |
Рис. 4 |
Из опыта известно, что величина деформации стержня зависит от способа его закрепления и рода нагрузки.
При работе стержня на изгиб возможны три способа его закрепления. Стержень может быть закреплен одним концом (рис. 3), может свободно лежать на двух опорах (рис. 4). Могут быть закреплены оба конца стержня (рис. 5).
S |
L-∆L |
K=1/6 |
|
|
L+∆L |
Рис. 5 |
Рис. 6 |
Изгиб относится к виду неоднородных деформаций. При изгибе происходит растяжение одних слоев стержня и сжатие других (рис. 6). Нагрузка может быть как сосредоточенной (рис.7), так и рассредоточенной (рис. 8). Рассредоточенной нагрузкой может быть собственный вес стержня.
60
σуп
Для экспериментального определения Е чаще пользуются сосредоточенной нагрузкой, например весом гирь Р. Установлено, что если испытываемый образец имеет форму бруска, то при действии сосредоточенной нагрузки на середину образца величина прогиба ∆l выражается формулой
P |
|
P |
P P P P P P P |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7 |
P L3 |
|
|
|
|
Рис. 8 |
|||||||
|
∆l = k |
, |
|
(4) |
|||||||||
E b h3 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
где k - коэффициент пропорциональности, зависящий от способа закрепления (cм. рис. 3-5); h - высота бруска; L - длина бруска между точками опоры.
Если брусок свободно лежит на опорах, то k = 1/4 и модуль Юнга определится выражением
E = |
P L3 |
. |
(5) |
|
|||
|
4 b h3∆l |
|
|
ОПИСАНИЕ УСТАНОВКИ |
|||
Для определения модуля Юнга |
в этой работе пользуются |
||
установкой, схема которой изображена на рис. 9.
В нашем опыте используемый брусок свободно опирается на две опоры. Изменение нагрузки Р на брусок осуществляется увеличением числа грузов, устанавливаемых на площадке П. Величина прогиба измеряется с помощью микрометра М, снабженного элек-
трическим индикатором контакта. По загоранию индикаторной лампочки можно судить о наличии соприкосновения микрометра с поверхностью бруска - отсчет l1. Под нагрузкой брусок вы-
61
ходит из контакта и для его восстановления необходимо опустить стержень микрометра до нового контакта - l2. После этого можно легко вычислить величину прогиба ∆l:
∆l = l2 - l1. |
(6) |
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1.Взять у преподавателя или лаборанта не менее двух брусков из разных материалов.
2.Измерить не менее 5 раз геометрические размеры брусков. Результаты занести в таблицу 1. (Таких таблиц будет две).
|
|
|
|
|
Таблица 1 |
|
№ |
l, м |
∆l, м |
b, м |
∆b, м |
h, м |
∆h, м |
п/п |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
Среднее |
|
|
|
|
|
|
значение |
|
|
|
|
|
|
3. Нагрузить брусок гирей Р. Произвести не менее трех раз отсчеты l1, l2. Рассчитать по средним значениям ∆l, а по формуле
(5) - Е. Измерения провести для трех различных грузов. Данные занести в таблицу 2. Учесть, что отсчет микрометра, соответствующий моменту замыкания тока, не вполне точен, поскольку рука может продолжить вращать винт после достижения контакта. Рекомендуется брать среднее из двух показаний при замыкании и размыкании электрической цепи.
Таблица 2
№ P1,2,3, H l1, м ∆l1, м l2, м ∆l2, м ∆l, м E, Н/м
п/п
1
2
3
62

Среднее
значение
4.Построить графики зависимости Р = f(∆l ).
5.Оценить абсолютную и относительную погрешности в определении модуля Юнга.
Рекомендуемая литература
1.Савельев И.В. Курс общей физики. T. 1. - М.: Наука, 1989.
2.Архангельский М.И. Курс физики: механика. - M.: Просве-
щение, 1975. С. 69-72, 222-234.
3.Ландсберг Г.С. Элементарный учебник физики. T.1. - М.: Нау-
ка, 1967. § 58-62.
Для получения зачета необходимо
1.Продемонстрировать умение определять модуль Юнга по прогибу.
2.Представить отчет по установленной форме.
3.Уметь отвечать на вопросы типа:
а) Какие виды деформаций вам известны?
б) Изобразить графически вид кривых напряжение-
деформация для хрупких и пластических тел. |
|
|
в) При каком расположении доски |
1) P |
P |
или 2) жесткость при одинаковой нагрузке бу- |
|
|
дет меньше? Ответ обосновать. |
|
|
г) Во сколько раз уменьшится прогиб, |
|
|
если толщину доски увеличить в два раза? |
1) |
2) |
д) Из бревна диаметром Д изготов- |
|
|
лен брус со сторонами А и В. При каком |
|
А |
соотношении А и В брус обладает наи- |
Д |
|
большей жесткостью (наименьшим про- |
|
|
гибом при данной нагрузке)? |
|
|
е) Рассказать об анизотропии упру- |
|
|
гих свойств? |
|
|
ж) Какому виду деформации хорошо сопротивляется камень (сжатию, изгибу или кручению)? Какому виду деформации подвергается он в стенах зданий, колоннах, арках?
з) Бетон хорошо сопротивляется сжатию, но плохо выдерживает растяжение. Сталь обладает большой прочностью на растяжение. Каким свойством обладает железобетон?
и) В двух параллельных плоскостях на тело действуют противоположно направленные пары сил. Какой вид деформации испытывает тело?
к) Какие виды деформаций испытывают стены зданий, тросы подъемных кранов, резцы, сверла, валы машин, металл при резании?
64
Работа № 6. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛ
МЕТОДОМ ТРИФИЛЯРНОГО ПОДВЕСА
Цель работы: определение момента инерции некоторых тел относительно оси вращения, проходящей через центр масс, исследование влияния на момент инерции переноса осей вращения (проверка теоремы Штейнера методом крутильных колебаний).
Принадлежности: трифилярный подвес, секундомер, штангенциркуль, тела для измерения момента инерции.
Вопросы, знание которых необходимо для допуска к выполнению работы
1.Угловая скорость. Связь между угловой скоростью тела и линейной скоростью его точек. Единицы измерения.
2.Угловое ускорение. Связь между угловым ускорением тела и линейным ускорением его точек. Единицы измерения.
3.Что называется плечом силы?
4.Что называется моментом силы? Чем обусловлены его величина и направление? Единицы измерения.
5.Что называется моментом инерции твердого тела? Единицы измерения. От чего зависит величина момента инерции?
6.Напишите и поясните основное уравнение динамики вращательного движения. Какова роль момента инерции в этом уравнении?
7.Сформулируйте теорему Штейнера.
8.В чем отличие крутильных колебаний от колебаний физического маятника?
9.Почему натяжение нитей трифилярного подвеса должно быть одинаково?
10.Под действием какой силы трифилярный подвес совершает крутильные колебания?
11.Расскажите порядок выполнения работы.
65
ВВЕДЕНИЕ
При рассмотрении вращения твердого тела с динамической точки зрения понятие о силах заменяется понятием о моментах сил, понятие о массе - понятием о моменте инерции. Если разделить мысленно вращающееся твердое тело на n элементарных масс ∆mi, находящихся на расстоянии ri от оси вращения, то все они будут иметь в данный момент одинаковые уг-
ловые скорости ω и угловые ускорения β .
Момент инерции материальной точки численно равен произведению массы точки ∆mi на квадрат расстояния ri от оси вращения: ∆mi ri2 . Момент инерции всего твердого тела J численно равен сумме моментов инерции всех его точек:
n |
|
∑∆mi ri2 = J . |
(1) |
i=1
Величина момента инерции тела зависит от характера распределения масс относительно оси вращения и поэтому одно и то же тело может иметь разные моменты инерции относительно разных осей.
Если тело может вращаться вокруг неподвижной оси, то изменение его движения зависит от действующего на него момента силы. Моментом силы относительно неподвижной оси называется величина, численно равная произведению силы F на ее плечо h. Плечо силы – есть кратчайшее расстояние от центра вращения до линии действия силы.
M = F h. (2)
Вращательное движение тела характеризуется угловой скоростью ω и угловым ускорением β:
ω = |
dϕ |
; |
β = |
dω |
, |
(3) |
|
dt |
dt |
||||||
|
|
|
|
|
где ϕ - угловое перемещение тела.
Основной закон динамики вращательного движения, выражающий зависимость углового ускорения от момента силы, записывается в виде:
M = J β. |
(4) |
66

Так как момент инерции зависит от расстояния массы относительно оси вращения, то при смещении оси момент инерции изменяется. Момент инерции тела относительно оси, проходящей через центр масс (J0), в большинстве случаев определить нетрудно. В этом случае, зная момент инерции относительно оси вращения, проходящей через центр масс, можно найти момент относительно любой оси, параллельной первой.
Для случая параллельных осей применима теорема Штейне-
ра: момент инерции относительно любой оси вращения ра-
вен сумме момента инерции относительно оси вращения, проходящей через центр масс, и произведения массы тела на квадрат расстояния между осями (d):
J = J0 + md2. |
(5) |
O' O
d
O'1 O1
Рис. 1
Следовательно,
Например. Подсчитаем момент инерции cплошного стержня длины l относительно оси О'О’1, проходящей через конец стержня (рис.1). По теореме Штейнера J = J0 + md2. Момент инерции относительно оси OO1, проходящей через центр
масс, J0 равен: Jo = 121 ml 2 .
J = 121 ml 2 + 14 ml 2 = 13 ml 2 .
На практике момент инерции тела можно определить методом трифилярного подвеса.
Трифилярный подвес представляет собой круглую платформу, подвешенную на трех симметрично расположенных нитях, укрепленных у краев этой платформы. Наверху эти нити также симметрично прикреплены к диску несколько меньшего диаметра, чем диаметр платформы (рис. 2).
Платформа может совершать крутильные колебания вокруг вертикальной оси, перпендикулярной к ее плоскости и проходящей через ее центр. Центр тяжести платформы при этом перемещается по оси вращения. Период колебания определяется ве-
67
Рис. 2 Рис. 3
личиной момента инерции платформы, он будет другим, если платформу нагрузить каким-либо другим телом. Этим и пользуются в настоящей работе. Если платформа массы m, вращаясь в одном направлении, поднялась на высоту h, то приращение потенциальной энергии будет равно E1 = mgh. Вращаясь в другом направлении, платформа пройдет через положение равновесия с
кинетической энергией, равной E2 = 12 Jω02 , где J - момент
инерции платформы; ω0 - угловая скорость платформы в момент прохождения ею положения равновесия. Пренебрегая работой сил трения, на основании закона сохранения механической энергии имеем:
1 Jω02 |
= mgh . |
(6) |
2 |
|
|
Считая, что платформа совершает гармонические колебания, можем написать зависимость углового смещения ϕ платформы от времени в виде:
68
ϕ = a sin |
2π |
= a sin ωt , |
(7) |
|
|||
0 |
T |
0 |
|
|
|
|
где α0 - амплитуда колебаний, Т - период колебаний, t - текущее время. Угловая скорость, являющаяся первой производной ϕ по времени, выражается как:
ω = |
dϕ |
= |
2πα0 |
сos |
2πt |
= ω0 сos |
2π |
t . |
(8) |
dt |
T |
T |
|
||||||
|
|
|
|
T |
|
||||
В момент прохождения через положение равновесия (t = 0; (1/2)T; (3/2)Т и т.д.) абсолютное значение этой величины будет
ω0 = |
2πα0 |
. |
|
|
|
(9) |
||||
|
|
|
|
|
||||||
Из (6) и (9) имеем: |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mgh = |
1 |
|
2πα |
0 |
|
2 |
|
|||
|
|
J |
|
|
|
|
. |
(10) |
||
2 |
|
|
T |
|
||||||
|
|
|
|
|
|
|
||||
Поворот платформы на угол α0 около оси ОО' соответствует ее поднятию на высоту h. Если l - длина нитей подвеса, R - расстояние от центра платформы до точек крепления нитей на ней, r - радиус верхнего диска, то легко видеть (рис. 3), что
|
|
h = OO1 = BC − BC1 |
= |
|
(BC)2 − (BC )2 |
|
|||||||||
|
|
|
|
|
|
|
1 |
. |
|||||||
|
|
|
BC |
+ BC1 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Так как (ВС)2 = (АВ)2 - (AC)2 = l2 - (R - r)2, |
|
|
|
|
|
||||||||||
|
(ВС1)2 = (ВА1)2 - (А1С1)2 = l2 - (R2 + r2 - 2R r cosα0), |
||||||||||||||
то |
h = |
|
2R r (1 − cos α |
0 |
) |
= |
4R r sin 2 |
α |
0 |
/ 2 |
. |
|
|||
|
BC + BC1 |
|
|
|
|
BC + BC1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
При малых углах отклонения α0 значение синуса этого угла можно заменить просто значением α0 (α→ sinα ≈ α), а величину знаменателя при выполнении условия (R - r)<<BC положить равной (ВС + ВС1) ≈ 2l. Тогда
|
R r α |
2 |
|
|
R r |
α |
|
2 |
|
J |
2πα |
0 |
|
2 |
|
h = |
|
0 |
и |
mg |
|
|
0 |
|
= |
|
|
|
, |
||
|
2l |
|
|
|
2l |
|
|
|
|
2 |
|
T |
|
|
|
откуда
69
J = |
mg R r |
T2 . |
(11) |
|
|||
|
4π2l |
|
|
По формуле (11) может быть определен не только момент инерции платформы, но также и тела, помещенного на нее, поскольку все величины в правой части формулы могут быть непосредственно измерены.
Вращательный импульс, необходимый для начала крутильных колебаний, сообщается платформе путем поворота верхнего диска вокруг его оси при помощи натяжения шнура, приводящего в движение рычажок, связанный с диском. Этим достигается почти полное отсутствие других не крутильных колебаний, наличие которых затрудняет измерения.
Для удобства отсчета колебаний на платформе имеется метка, против которой при покоящейся платформе устанавливается указатель - стержень на подставке.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1.Сообщают пустой платформе вращательный импульс и при помощи секундомера измеряют время 20 полных колебаний
(t0), что дает возможность достаточно точно определять величину периода Т0.
2.По формуле (11) определяют момент инерции пустой платформы J0.
3.Путем взвешивания определяют массу исследуемого тела (m), а затем нагружают им платформу и вновь измеряют время t 20 колебаний, а затем и период колебания Т всей системы.
4.По формуле (11) вычисляют момент инерции всей сис-
темы J1, принимая ее массу равной сумме масс тела (m) и платформы (m0). Величина момента инерции тела J определяется как
разность J = J1 - J0.
5. Данные заносятся в таблицу 1 и вычисляются абсолютная и относительная погрешности.
6. При помощи трифилярного подвеса проверяется теорема Штейнера, для чего необходимо иметь два совершенно одинаковых тела. Сначала определяют момент инерции этих тел, положив их одно на другое в центре платформы. Затем оба тела
70

располагают симметрично на платформе и определяют их момент инерции. Половина этой величины и будет давать момент инерции одного тела, находящегося на фиксированном расстоянии от оси вращения. Зная это расстояние, массу тела, момент инерции тела, положенного в центре платформы, можно проверить теорему Штейнера.
Таблица 1
№ |
r, |
∆r, |
R, |
∆R, |
l, |
m0, |
t0, |
T0 |
∆T0, |
m, |
t, |
Т, |
∆Т, |
п/п |
м |
м |
м |
м |
м |
кг |
c |
c |
c |
кг |
с |
с |
с |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Среднее |
|
|
|
|
|
|
|
|
|
|
|
|
|
значение |
|
|
|
|
|
|
|
|
|
|
|
|
|
Тела на платформе следует располагать строго симметрично, так, чтобы не было перекоса платформы, для чего на платформе нанесены концентрические окружности на определенном расстоянии друг от друга. При измерениях необходимо использовать амплитуды колебаний, большие чем 5-6°.
Рекомендуемая литература
1.Савельев И.В. Курс общей физики. T. I. - М.: Наука, 1989.
2.Архангельский М.М. Курс физики: механика. - М.: Просвеще-
ние, 1975. С. I69-I93.
3.ЛивенцевН.М. Курс физики.- М.: Высшая школа, 1974. § 11-13.
4.ГрабовскийВ.И. Курсфизики.- М.: Высшаяшкола, 1970. §21-23.
5.Эткинс П. Физическая химия. - М.: Мир. 1980.
6.Кац Ц.Б. Биофизика на уроках физики. - М.: Просвещение, 1988.
Для получения зачета необходимо
1.Продемонстрировать преподавателю умение определять момент инерции методом трифилярного подвеса.
2.Представить отчет по установленной форме.
3.Уметь отвечать на вопросы типа:
а) Может ли масса тела рассматриваться, как сосредоточенная в его центре, если требуется рассчитать момент инерции тела?
б) Два диска одинакового веса и толщины сделаны из металлов различных плотностей. Какой из них обладает большим моментом инерции?
в) Требуется определить момент инерции тела сложной геометрической формы. Математический расчет в таком случае становится затруднителен. Укажите способ, с помощью которого момент инерции тела мог бы быть определен экспериментально.
|
|
|
г) На рис. 4 представлено тело, ось вра- |
|
r |
|
A |
щения которого проходит через точку О, пер- |
|
O |
||||
FB |
|
FA |
пендикулярную чертежу. Как определить мо- |
|
|
|
|||
B |
мент силы F, приложенной в точке А (B)? Как |
|||
|
||||
|
|
|
направлен вектор момента силы, вектор мо- |
|
Рис. 4 |
||||
мента импульса? |
||||
|
|
|
||
д) Два сплошных цилиндра, сделанных из разных материа- |
||||
лов, имеют одинаковые массы и радиусы основания. Сравните их моменты инерции относительно осей симметрии.
е) Два цилиндра имеют одинаковые размеры и массы. Как, пользуясь наклонной плоскостью, определить, какой из цилиндров сплошной, какой полый?
ж) Относительно какой из двух осей момент инерции больше: относительно оси, проходящей через центр масс, или относительно оси, не проходящей через центр масс?
з) Определите момент инерции линейной молекулы азота, если известно, чтодлина связи атомовравна109.4 нм;
и) Определите длину связи в молекуле дейтерия, если известно, что момент инерции молекулы равен 9.2 10-42 кг м2.
к) Рассчитайте момент инерции и кинетическую энергию электрона, вращающегося по первой боровской орбите, если радиус орбиты равен 0.5 Е, а частота обращения электрона вокруг ядра - 2 1015 с-1.
72

Работа № 7. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ НЕКОТОРЫХ ТЕЛ МЕТОДОМ
КРУТИЛЬНЫХ КОЛЕБАНИЙ
Цель работы: экспериментальное определение момента инерции тела, если момент инерции другого тела известен.
Принадлежности: штатив, упругий подвес, прямоугольный брусок, кольцо, весы, разновески, штангенциркуль, секундомер.
Вопросы, знание которых обязательно для допуска к выполнению работы
1.Угловая скорость. Связь между угловой скоростью тела и линейной скоростью его точек. Единицы измерения.
2.Угловое ускорение. Связь между угловым ускорением и линейным ускорением его точек. Единицы измерения.
3.Что называется моментом силы? Чем обусловлены его величина и направление? Единицы измерения.
4.Что называется моментом инерции твердого тела? Единицы измерения.
5.Основной закон динамики вращательного движения.
6.Что называется модулем кручения подвеса?
7.В чем отличие крутильных колебаний от колебаний физического маятника?
8.Под действием какой силы совершаются крутильные колебания в данной работе?
9.Какой принцип положен в основу вычисления момента инерции твердого тела в данной работе?
10.Расскажите порядок выполнения работы.
ВВЕДЕНИЕ
При рассмотрении вращения твердого тела с динамической точки зрения понятие о силах заменяется понятием о моментах сил М, понятие о массе - понятием о моменте инерции J. Рассмотрим движение материальной точки массой m по окружности радиуса r (рис. 1). Материальная точка движется под дей-
73
ствием силы F , направленной по касательной к окружности. Эта сила сообщает точке тангенциальное ускорениеaτ , и второй закон Ньютона принимает вид
|
|
F = m arτ . |
(1) |
|
|
Поскольку угловое ускорение связано |
|
|
m |
с линейным соотношением ατ = βr, то (1) |
|
rr |
принимает вид |
|
|
|
|
||
r |
F = m rβ. |
(2) |
|
|
F |
Умножим обе части уравнения на r, полу- |
|
|
|
чим |
|
|
Рис. 1 |
F r = m r2 β. |
(3) |
|
|
Величина F r = M называется моментом |
|
силы и численно равна произведению силы на плечо силы - длину перпендикуляра, опущенного из центра вращения на линию действия силы. Момент силы - величина векторная, его направление определяется правилом правого винта.
Скалярная величина, численно равная произведению массы материальной точки на квадрат расстояния от ее центра вращения J = m r2, называется моментом инерции точки. Таким обра-
зом, уравнение (3) запишется в виде |
|
M = J β |
(4) |
и носит название основного закона динамики вращательного движения. Из (4) видно, что M и β совпадают по направлению.
Момент инерции твердого тела относительно оси вращения можно вычислить, разбив его на бесконечно большое число очень малых элементов ∆mi, которые можно рассматривать как материальные точки. Тогда выражение для момента инерции элемента массы ∆mi, находящегося на расстоянии ri от оси вращения, будет ∆Ji = ∆mi ri2 (рис.2), а момент инерции всего тела:
n |
|
J = ∑∆mi ri2 |
(5) |
i=1
или
74
J = ∫ri2dm = ∫ri2 ρdV |
O |
|
|
||
v |
|
|
Моменты инерции тел про- |
∆m |
|
стой формы могут быть легко вы- |
ri |
|
|
||
числены. В таблице 1 приводятся |
|
|
значения моментов инерции некото- |
|
|
рых тел, рассчитанные относитель- |
|
|
но оси, проходящей через центр их |
O' |
|
масс. Эта ось является также осью |
Рис. 2 |
|
симметрии тела. |
||
|
Таблица 1
Таблица моментов инерции
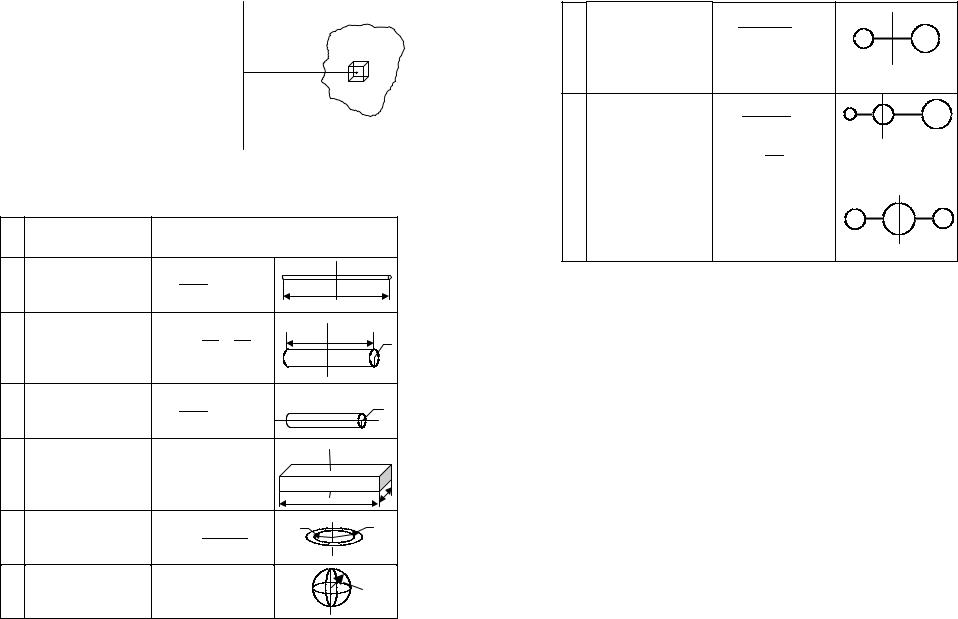
№ Форма тела |
Формула для определения момента |
|||||||||||||
п/п |
|
|
|
|
|
|
|
инерции тела J |
|
|||||
1 |
Однородный тон- |
J = ml |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
кий сплошной |
|
|
|
|
|
|
|
|
|
|
l |
||
|
стержень длиной l |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
Однородный |
|
|
|
2 |
|
l |
2 |
|
|
|
|||
|
сплошной цилиндр |
|
r |
|
|
+ |
|
|
|
l |
r |
|||
|
J = m |
|
|
|
|
|
|
|
|
|
||||
|
радиуса r и длиной |
|
|
4 |
|
12 |
|
|
||||||
|
l (поперечная ось) |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
Однородный |
J = |
mr2 |
|
|
|
|
|
|
|
|
|
r |
|
|
сплошной цилиндр |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
радиуса r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
Однородный |
|
|
|
|
2 |
+ b |
2 |
|
|
|
|||
|
сплошной брусок |
|
a |
|
|
|
|
|
||||||
|
J = m |
|
|
|
12 |
|
|
|
|
|
||||
|
прямоугольного |
|
|
|
|
|
|
|
|
b |
|
|||
|
сечения (a×b) |
|
|
|
|
|
|
|
|
|
|
|
a |
|
5 |
Кольцо с внутрен- |
|
|
|
2 |
|
|
2 |
|
|
r1 |
r2 |
||
|
ним и внешним ра- |
|
r1 |
|
+ r2 |
|
|
|
|
|||||
|
J = m |
|
|
|
2 |
|
|
|
|
|
|
|||
|
диусами r1 и r2 |
|
|
|
|
|
|
|
|
|
|
|
||
6 |
Однородный |
J = |
2 mr2 |
|
|
|
|
|
|
r |
||||
|
сплошной шар ра- |
|
|
|
|
|
|
|||||||
|
диуса r. |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
75 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
Линейная двух- |
J = m1 m2 |
r 2 |
|
|
r |
||||
|
атомная молекула |
|
|
|||||||
|
с массами атомов |
m1 + m2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
m1 и m2 на расстоя- |
|
|
|
|
|
|
|
|
|
|
нии r |
|
|
|
|
|
|
|
|
|
8 |
Линейная трех- |
|
m |
+ m |
|
|
r |
r' |
||
|
атомная молекула |
J = |
|
1 m |
2 |
(r + |
|
|
||
|
с массами атомов |
′ |
2 |
|
m2 |
(m1r |
2 |
+ |
|
|
|
m1, m2, m3 на рас- |
|
|
|||||||
|
+ r ) |
|
+ |
|
|
|||||
|
стояниях r и r′, со- |
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ответственно |
m3r′2 ) |
|
|
|
|
r |
r |
||
|
Если m1 = m3 и |
m = m1+m2+m3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
r = r′ |
J = 2m1r2 |
|
|
|
|
|
|||
Момент инерции тела любой формы относительно оси, проходящей через центр масс, можно найти опытным путем, исходя из закона колебаний крутильного маятника, если имеется другое тело, момент инерции которого относительно оси, проходящей через центр масс, известен. Момент инерции тела можно определить, измеряя период крутильных колебаний этого тела. Для этого исследуемое тело подвешивают к концу подвеса, другой конец которого зажат в штативе. Если к телу приложить пару сил в горизонтальной плоскости, то тело повернется на угол ?. Возникающие при этом силы упругости подвеса будут стремиться вернуть тело в исходное положение. Если затем систему предоставить самой себе, то она будет совершать гармонические колебания (крутильные колебания), период которых определяется моментом инерции системы и модулем кручения подвеса.
Момент сил упругости пропорционален ? - угловому смещению и направлен в сторону, противоположную смещению, то есть:
M = – C ?, |
(4) |
где C - модуль кручения подвеса.
По второму закону Ньютона для вращательного движения имеем:
76

|
J·? = - C·?, |
(5) |
||||||||
поскольку |
|
|
|
|
|
|
||||
? = |
|
d2ϕ |
|
, |
|
(6) |
||||
|
dt2 |
|
|
|||||||
то |
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
d2ϕ |
|
= - |
C |
ϕ . |
(7) |
||||
|
dt 2 |
|
|
|
J |
|
|
|||
Полагая, что |
|
|
|
|
|
|
||||
|
|
C |
= ?2, |
|
|
|
(8) |
|||
|
|
J |
|
|
|
|
|
|
||
получим уравнение гармонического колебательного движения, круговая частота которого ?.
Учитывая, что
?2 = (2π)2 ,
T 2
из соотношения (8) можно найти период колебаний крутильного маятника
|
|
|
|
T = 2π |
J . |
(9) |
|
|
C |
|
|
Для упругого подвеса С - величина постоянная, численно равная моменту силы, вызывающему закручивание подвеса на единичный угол. Момент инерции тела можно определить двумя способами:
1.Измеряют периоды крутильных колебаний двух тел, подвешенных на один и тот же подвес, момент инерции одного из которых известен, а второго - нужно определить.
2.Измеряют период колебаний тела, момент инерции которого известен, а затем на это тело помещают другое с искомым моментом инерции и определяют период колебаний системы.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Определение момента инерции бруска (1 способ).
77
а) На подвес, закрепленный в штативе, подвесить брусок так, чтобы подвес совпал с геометрической осью бруска. Повернуть брусок на некоторый угол и отпустить. Определить время 15-20 колебаний, а затем вычислить период колебаний бруска Тб. Опыт повторить 5 раз.
б) Затем на подвес подвесить кольцо. Определить время 15-20 колебаний и вычислить период колебаний кольца Тк.. Опыт повторить 5 раз.
в) По формуле Jк = 12 m(R12 + R 22 ) , где m - масса, R1 и R2
- внешний и внутренний радиусы кольца, вычислить Jк (предварительно необходимо измерить не менее 5 раз R1 и R2 и взвесить кольцо). Если толщина кольца мала по сравнению с ради-
усом, то Jк = mR2, где R = (R1+R2)/2.
г) Учитывая, что Tк = 2π
 Jк/C и Tб = 2π
Jк/C и Tб = 2π
 Jб/C , находим, что Jб =JкТб2/Тк2. Подставляя в последнее выражение Тб,
Jб/C , находим, что Jб =JкТб2/Тк2. Подставляя в последнее выражение Тб,
Tк и Jк, вычислить Jб.
д) Результаты измерений и вычислений занести в таблицу 1 и вычислить абсолютную и относительную погрешности измерений.
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
||
№ |
nб |
tб, |
Тб, |
∆Тб, |
nк |
tк, |
Tк, |
Rк1, |
∆Rк1, |
Rк2,м |
∆Rк2, |
m, |
п/п |
|
с |
с |
с |
|
c |
c |
м |
м |
|
м |
кг |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
Средн. |
|
|
|
|
|
|
|
|
|
|
|
|
знач-е |
|
|
|
|
|
|
|
|
|
|
|
|
е) Сравнить экспериментально полученное значение Jб с расчетным, учитывая, что Jб = mб(a2 +b2)/12 (a и b - длина и толщина бруска, определенные по 5 измерениям. Сравнение удобно
провести в виде |
∆J |
= |
J экспер −J расч |
. |
|
||||
|
J расч |
|
J расч |
|
78

2. Определение момента инерции кольца (2 способ).
а) На упругом подвесе, закрепленном в штативе, подвесить прямоугольный брусок со сторонами α, b, c так, чтобы нить была перпендикулярна длине бруска. Затем, определяя время 15-20 полных крутильных колебаний, найти период колебаний Тб. Опыт повторить 5 раз.
б) После этого на брусок поместить кольцо и определить период колебаний Тб+к, системы кольцо-брусок. Опыт повторить 5 раз.
в) Момент инерции системы равен сумме моментов инер-
ции бруска и кольца в отдельности: Jб+к =Jб + Jк. Отсюда |
|
Jк = Jб+к - Jб |
(10) |
согласно (9) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
к |
= 2π Jб+к ; |
|
|
T |
|
= 2π Jб . |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
б+ |
|
|
|
|
|
|
С |
|
|
|
б |
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
||||||||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
(Т |
|
|
|
)2 |
|
|
|
|
|
|
|
(Т |
|
|
|
)2 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
J |
б+к |
|
= |
б+к |
|
|
Jб+к |
= Jб |
|
б+к |
. |
|
|
|
|
|
(11) |
||||||||||||||||||
|
|
|
|
|
|
Jб |
|
|
|
|
Тб2 |
|
|
|
|
|
|
|
Тб2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Из формул (10) и (11) получаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
J |
|
|
= J |
|
|
(Т |
б+к |
)2 |
|
− J |
|
|
|
|
|
|
|
|
|
J |
|
|
|
[(Т |
|
|
)2 |
− T2 |
] |
|
|||||||||
|
|
к |
б |
|
|
|
|
|
|
б |
или |
|
J |
к |
= |
|
|
б |
|
|
б+к |
|
|
|
б |
|
|
||||||||||||||
|
|
|
|
Тб2 |
|
|
|
|
|
|
|
|
|
|
Тб2 |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Момент инерции бруска вычисляют по формуле Jб = |
|||||||||||||||||||||||||||||||||||||||
mб(a2 + b2)/12 по средним значениям из 5 измерениям. |
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
г) Полученные опытным путем результаты сравните с тео- |
|||||||||||||||||||||||||||||||||||||||
ретическими, |
|
|
|
зная, |
|
|
|
что |
момент |
|
|
|
|
|
инерции |
|
кольца |
||||||||||||||||||||||||
J |
|
= 1 m |
|
(R 2 |
|
+ R 2 |
|
) |
|
|
можно рассчитать |
|
по |
5 |
измерениям. |
||||||||||||||||||||||||||
|
к |
2 |
|
к |
к1 |
|
|
|
|
к2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Сравнение удобно провести в виде |
|
∆J |
= |
|
|
J экспер − J расч |
|
|
. |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J расч |
|
|
|
|
|
|
|
J расч |
|
|
|
|
|
|
||||
д) Результаты измерений и вычислений занести в таблицу 2 и вычислить абсолютную и относительную погрешности измерений.
Таблица 2
79
№ |
nб |
tб, |
Тб, |
∆Тб, |
nб+к, |
tб+к, |
Тб+к, |
mб, |
α, |
∆α, |
b, |
∆b, |
п/п |
|
с |
с |
с |
|
c |
с |
кг |
м |
м |
м |
м |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
Среднее |
|
|
|
|
|
|
|
|
|
|
|
|
значение |
|
|
|
|
|
|
|
|
|
|
|
|
Рекомендуемая литература
1.Савельев И.В. Курс общей физики. T. I. - М.: Наука, 1989.
2.Архангельский М.М. Курс физики: механика. - М.: Просвеще-
ние, 1975. C. 169-193.
3.Ливенцев Н.М. Курсфизики.- М.: Высшая школа, 1974. §11-13.
4.Ремизов А.Н. Курс физики для медицинских институтов. - М.: Высшая школа, 1976. Гл. 3.
Для получения зачета необходимо
1.Продемонстрировать экспериментальные методы определения моментов инерции бруска и кольца.
2.Представить отчет по установленной форме.
3.Уметь отвечать на вопросы типа:
а) каков физический смысл понятия «момент инерции»? б) с какой целью используется вспомогательное тело прос-
той геометрической формы при определении момента инерции тела?
в) как определяют момент инерции относительно точки? г) как определяются моменты сил относительно оси вра-
щения и точки?
Смотри также контрольные вопросы к работе № 6.
80
1. Греческий алфавит
Греческий алфавит
Α α |
альфа |
Ν ν |
ни |
Β β |
бета |
Ξ ξ |
кси |
Γ γ |
гамма |
Ο ο |
омикрон |
∆ δ |
дельта |
Π π |
пи |
Ε ε |
эпсилон |
Ρ ρ |
ро |
Ζ ζ |
дзета |
Σ σ ς |
сигма |
Η η |
эта |
Τ τ |
тау |
Θ ϑ |
тэта |
Υ υ |
ипсилон |
Ι ι |
йота |
Φ ϕ |
фи |
Κ κ |
каппа |
Χ χ |
хи |
Λ λ |
лямбда |
Ψ ψ |
пси |
Μ µ |
ми |
Ω ω |
омега |
2. Приставки для образования десятичных кратных и доль-
ных единиц
|
Приставки |
Мно- |
Приставки |
||
Множи- |
Наименова- |
Обоз- |
Наименова- |
Обозна- |
|
тель |
|
на- |
жи- |
|
|
|
ние |
чение |
тель |
ние |
чение |
|
|
||||
10-1 |
деци |
д |
1012 |
тера |
Т |
10-2 |
санти |
с |
109 |
гига |
Г |
10-3 |
милли |
м |
I06 |
мега |
М |
10-6 |
микро |
мк |
103 |
кило |
к |
10-9 |
нано |
н |
102 |
гекто |
г |
10-12 |
пико |
п |
101 |
дека |
да |
3. Основные физические константы
Скорость света в вакууме |
с = 2,998 108 м/с |
Гравитационная постоянная |
γ = 6,67 10-11 Н м2/кг2 |
Элементарный заряд |
е = I,6 10-19 Кл |
Постоянная Больцмана |
k = 1,38 10-23 Дж/К |
Масса электрона |
me =9,1 10-31 кг |
Масса протона |
mр =1,67 10-27 кг |
Число Авогадро |
NА = 6,02 1023 моль-1 |
Универсальная газовая постоянная |
R = 8,31 Дж/(К моль) |
Нормальное атмосферное давление |
P0 = 1 атм. = 760 мм рт. ст. = |
|
=101325 Па |
Плотность воздуха при нормаль- |
ρ = 1,29 кг/м3 |
ных условиях |
|
Ускорение свободного падения |
g0 = 9,81 м/с2 |
Радиус Земли |
R = 6,37 106 м |
Масса Земли |
M = 5,98 I024 кг |
4. Международная система единиц (СИ)
Основные единицы
Наименование величин |
Единицы измерения |
Сокращенные |
|
|
обозначения |
Длина |
метр |
м |
Масса |
килограмм |
кг |
Время |
секунда |
c |
Величина элект- |
ампер |
А |
рического тока |
|
|
Термодинамическая |
градус Кальвина |
К |
температура |
|
|
Сила света |
свеча |
cв |
81 |
82 |

5. Производные механические единицы
Наименование ве- |
Единицы измерения |
Сокращенные |
личин |
|
обозначения |
Частота |
Герц или секунда-1 |
Гц или с-1 |
|
|
|
Угловая скорость |
радиан в секунду |
рад/с |
Угловое ускорение |
радиан в секунду за се- |
рад/с2 |
|
кунду |
|
Скорость |
метр в секунду |
м/с |
Ускорение |
метр в секунду за секунду |
м/с2 |
Площадь |
квадратный метр |
м2 |
Объем |
кубический метр |
м3 |
Плотность |
килограмм на кубический |
кг/м3 |
|
метр |
|
Сила |
Ньютон |
Н |
Давление |
Паскаль или Ньютон на |
Па или Н/м2 |
|
квадратный метр |
|
Удельный вес |
Ньютон на кубический |
Н/м3 |
|
метр |
|
Работа и энергия |
Джоуль |
Дж |
Мощность |
Ватт или Джоуль в се- |
Вт или Дж/с |
|
кунду |
|
6.Механические свойства некоторых материалов (H/м2 при
20°С)
Материал |
Модуль |
Предел |
Предел |
Предел |
|
упругости |
упругости |
текучести |
прочности |
Алюминий |
70000 |
54 |
50 |
90 |
Латунь |
11500 |
- |
112 |
400 |
Медь |
100000 |
25 |
70 |
200 |
Свинец |
17000 |
25 |
7,5 |
18 |
Сталь (железо) |
210000 |
700 |
125 |
300 |
Стекло |
42000 |
- |
- |
30 |
7. Плотность веществ ρ (кг/м3)
а) Твердые тела при 20°С
Наименование |
Плотность |
Наименование |
Плотность |
|
|
|
|
Алмаз |
3500 |
|
8900 |
Алюминий |
2700 |
Никель |
8900 |
Бабит |
8000 |
Олово |
7800 |
Бетон |
2200 |
Оргстекло |
1200 |
Вольфрам |
19300 |
Парафин |
900 |
Графит |
2600 |
Пенопласт |
100 |
Древесина сухая: |
|
Платина |
21500 |
береза |
700 |
Пробка |
200 |
дуб |
800 |
Свинец |
11300 |
сосна |
500 |
Сталь |
7800 |
Железо |
7900 |
Стекло |
2500 |
Кирпич |
1800 |
Цинк |
7100 |
Латунь |
8500 |
Чугун |
7800 |
Лёд (0°С) |
900 |
Эбонит |
1200 |
|
б) Жидкости при 20°С |
|
|
|
|
|
|
Наименование |
Плотность |
Наименование |
Плотность |
Бензин |
700 |
Масло (смазочное) |
900 |
Вода (4°С) |
1000 |
Ртуть |
13550 |
Глицерин |
1260 |
Спирт |
800 |
Керосин |
800 |
Эфир |
710 |
83 |
84 |

Лабораторные работы по по механике
Компьютерная верстка ______________
Лицензия №021216 от 29.04.97 г.
Подписано в печать 03.06.2000 г. Формат 60х841/16. Бумага офсетная. Печать офсетная.
Объем: 5,25 усл. печ. л.; 5,25 уч.-изд. л.: Тираж 500 экз. Заказ №
Издательство РГПУ им. А.И. Герцена. 191186, С.-Петербург, наб.р. Мойки, 48
РГПУим. А.И. Герцена, 191186, С.-Петербург, наб.р. Мойки, 48