

4. Расчет переходных процессов на эвм
Моделирование динамики разгона и торможения двигателя постоянного тока производилось с использованием полной модели (1) и программы «Разгон», созданной в среде MatLab. На рис.3, рис.4 приведены экранные формы программы и результаты моделирования.
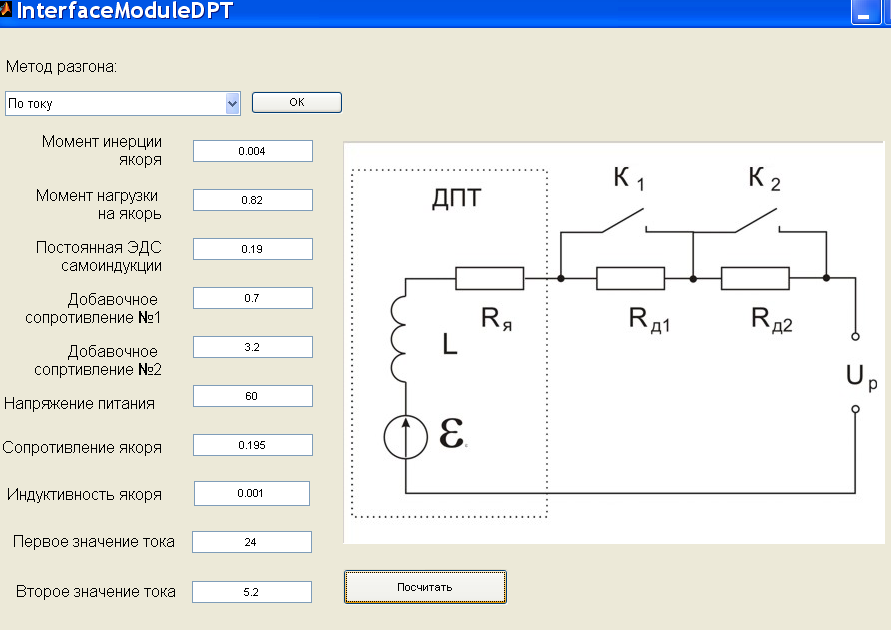
Рис. 3. Экранная форма программы «Разгон»
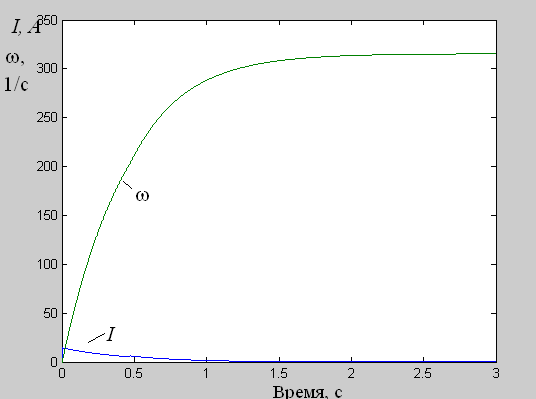
Рис. 4. Графики переходных процессов по току и скорости при разгоне
Из результатов моделирования следует, что теоретически рассчитанные параметры процесса разгона совершенно не соответствуют полученным при моделировании на более полной модели. Это объясняется крайне неудачной методикой выбора сопротивления резисторов.
В режиме торможения математическая модель (1) приобретает вид:
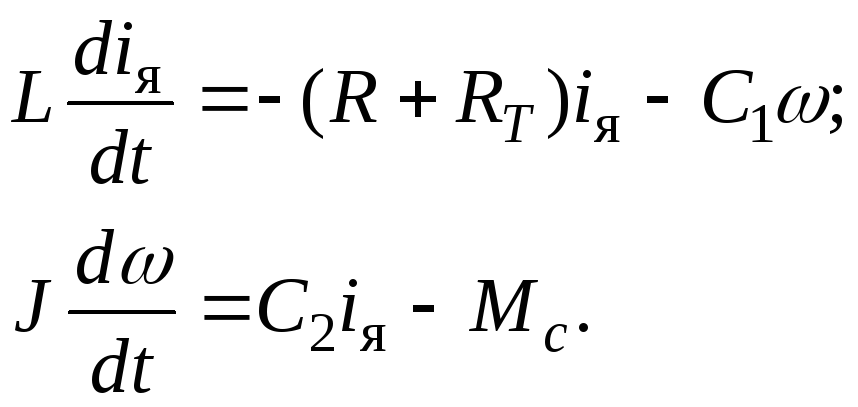 (26)
(26)
Или в матричной форме
![]() , (27)
, (27)
где
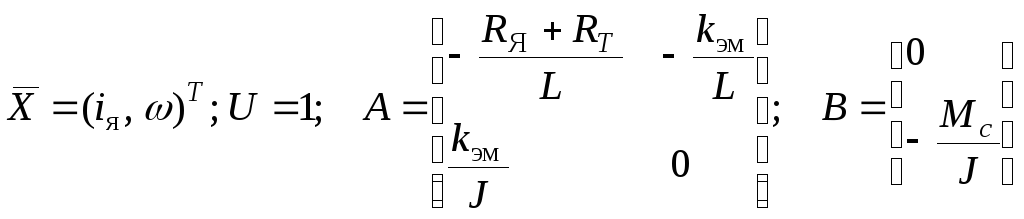 .
.
Для моделирования использовался математический инструментарий simulink. Структура модели программы приведена на рис. , Окно модели и полученные графики переходных процессов приведены на рис. . Как уже было сказано, эти графики справедливы только до момента пересечения ими оси абсцисс.
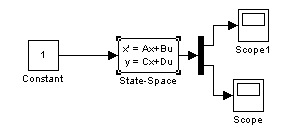
Рис. 5. Структура модели программы
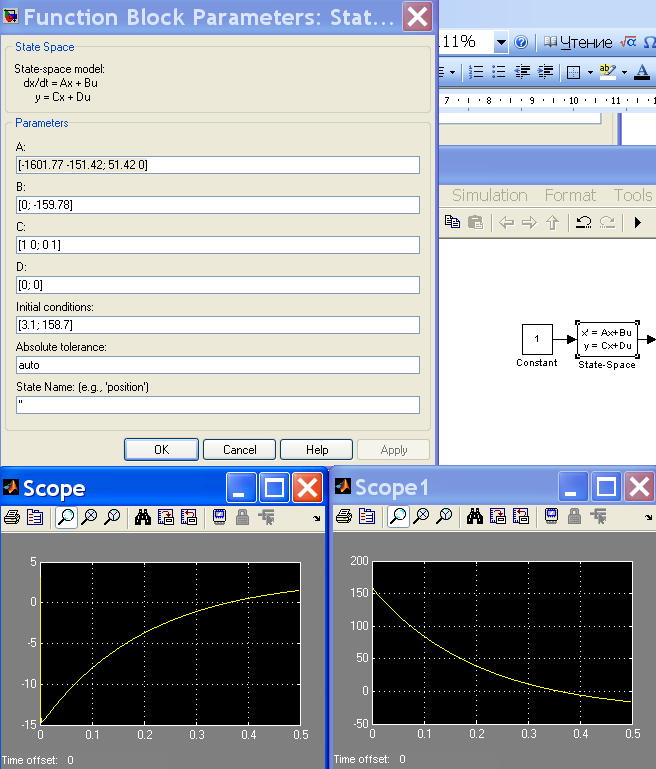
Рис. 6. Окно параметров модели и графики переходных процессов по току и скорости при торможении, полученные в результате моделирования
Из результатов моделирования следует, что теоретически рассчитанные параметры процесса торможения с точностью до ±10% соответствуют полученным при моделировании на более полной модели.
5. Разработка электрической принципиальной схемы
Система автоматического управления пуском двигателя постоянного тока состоит из силовой части, включающей резисторы R1, R2 и системы управления ими, включающей резистор R4, транзисторы VT1, VT2 и микропроцессор М, импульсный датчик ИД. Сопротивление резистора R4 выбирается на порядок меньше сопротивления обмотки якоря, поэтому он не влияет на разгонные характеристики двигателя, но падение напряжения на нем пропорционально току якоря. Поэтому этот резистор может играть роль датчика тока якоря.
Система может управлять пуском двигателя как по току, по времени и по скорости. В первом случае при замыкании пусковой кнопки К1, микропроцессор начинает измерять ток якоря, снимаемый с резистора R4. при достижении тока I1, микропроцессор подает сигнал, включающий оптрон семистора S2 через усилитель мощности на транзиcторе VT2, который замыкает резистор R2. При повторном достижением тока якоря значения I1, микропроцессор замыкает симистор S1. На этом процедура разгона заканчивается.
Во втором случае при замыкании кнопки К1 процессор начинает отсчитывать время и по достижении необходимых моментов последовательно включает семисторы S2, S1.
Во втором случае при угловая скоротсь вращения двигателя измеряется импульсным датчиком ИД. Процессор обрабатывает информацию, и при достижении необходимой скорости последовательно включает семисторы S2, S1.
Вид работы системы определяется программой процессора.
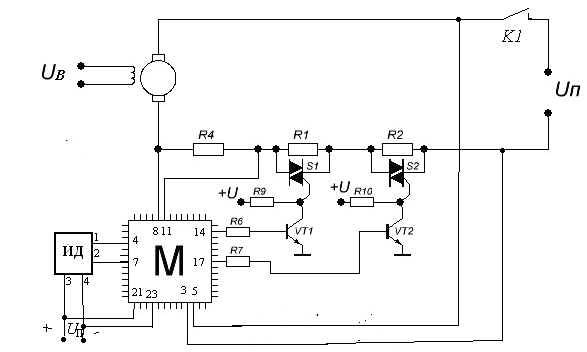
Рис. 7. Электрическая принципиальная схема системы управления
Спецификация к электрической принципиальной схеме Таблица 3
|
Спецификация | ||
|
Обозначение на схеме |
Номинал |
Тип |
|
R1 |
|
|
|
R2 |
|
|
|
R4 |
|
|
|
R5 |
|
|
|
R6 |
10 КОм |
|
|
R7 |
10 КОм |
|
|
R8 |
10 КОм |
|
|
R9 |
200 Ом |
|
|
R10 |
200 Ом |
|
|
VT1 |
|
2Т312А |
|
VT2 |
|
2Т312А |
|
S1 |
|
BTB24-600BWRG |
|
S2 |
|
BTB24-600BWRG |
|
M |
|
Микропроцессор, MQWM 356728GD |
|
ИД |
|
Импульсный датчик угловой скорости ИДМ-256 А |
ВЫВОДЫ
Рассчитаны дополнительные резисторы, обеспечивающие пуск и торможение двигателя постоянного тока из условия ограничения пускового тока.
Произведен расчет параметров пускового процесса по времени и скорости, исходя из упрощенной модели.
Параметры переходного процесса проверены методом математического моделирования на более полной модели, они показали совпадение с расчетными с точностью ±10% при торможении и полное несовпадение при разгоне.
Разработана электрическая принципиальная схема автоматизированной системы управления пуском.
Литература
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. –М.: Высшая школа, 1986.-335с.
2. Васильев Д.В. и др. Проектирование и расчет следящих систем. - Л.: Судостроение, 1964.-396с.
3. Москаленко В.В. Автоматизированный электропривод. - М.: Энергоатомиздат, 1986.-320с.
4. Брускин Д.Э., Зорохович А.Е., Хвостов А.С. Электрические машины и микромашины. М.: Высшая школа, 1971.- 430 с.
5. Фомин А.И., Барцева Л.А. Автоматизация управления двигателем постоянного токаю Метод. указ.. Саратов.: СГТУ, 2000. -17 с.