

2. Расчет дополнительных резисторов
По исходным данным определяют ряд величин, которые используются в дальнейшем расчете:
Номинальная угловая скорость вращения
![]() =
=![]() nH
= 157
nH
= 157
![]() .
.
Единый электромагнитный коэффициент
![]() эм
=
эм
=
 =
0,681
=
0,681![]()
3. Номинальный электромагнитный момент
Мн
= kЭМIЯН
=
3,4
![]()
4. Номинальный момент на валу двигателя
![]() М2Н
=
М2Н
=
![]() = 2,87
= 2,87 ![]()
5. Момент потерь
М0
= МН
-
М2Н
= 0,54
![]()
6. Полный момент сопротивления
Мс
=
![]() =2,12
=2,12
![]()
7. Ток якоря, соответствующий моменту сопротивления Мс
![]()
![]() =
=
![]() = 3,11
= 3,11 ![]()
8.
Угловая скорость вращения двигателя
при токе
![]()
![]() =
158,68
=
158,68 ![]() .
.
Рассчитаем число степеней пуска.
Эта величина определяется максимальным и минимальным токами (I1, I 2) при замыкании накоротко пусковых резисторов. Согласно [3, 5]:
I1=3·IЯН=15,0 [A], (8)
I2=1,2·Iс=3,73 [A] (9)
При аналитическом расчете число ступеней m определяется соотношением [3, 5]:
m = (lnIn/I1)/(lnI1/I2), (10)
где In - величина максимального пускового тока при отсутствии добавочных резисторов
![]() =
181,82 [A]. (11)
=
181,82 [A]. (11)
Подставляя в (10) численные значения параметров, получим
m= 1,80
Округлим найденное значений m в большую сторону до целой величины, получим:
m= 2
Следовательно, система управления пуском будет содержать два дополнительных резистора.
На первой ступени:
RЯ1 =R + RД1, (12)
где добавочное сопротивление RД1 определяется так:
RД1
=
![]() =1,83
[Ом].
=1,83
[Ом].
Соответственно
RЯ1 =2,43 [Ом].
На второй ступени
RЯ2 = R + RД1 + RД2 (7)
где
RД2
= (R
+ RД1)=7,36
[Ом].
(R
+ RД1)=7,36
[Ом].
Соответственно
RЯ2 =9,79 [Ом].
При определении сопротивления резистора для динамического торможения RТ исходят из того, что максимальный ток при динамическом торможении не должен превосходить по величине ток I1.
Поэтому
![]() =6,60
[Ом] (10)
=6,60
[Ом] (10)
3. Упрощенный расчет переходных процессов при пуске и динамическом торможении
При упрощенном расчете будем использовать упрощенную математическую модель переходного процесса, в которой предполагается, что электромагнитные переходные процессы быстро заканчиваются и не влияют на электромеханический ]5]:
![]() ,
(11)
,
(11)
где
Tmi=RяiJ/k2эм (12)
Электромеханическая постоянная времени двигателя на i-ом шаге разгона.
На первом этапе разгона этапе разгона будем иметь
Tm1=(Rя+RД1 +RД2) J/k2эм=0,28 [с]. (13)
На втором этапе разгона этапе разгона будем иметь
Tm2=(Rя+RД1) J/k2эм=0,07 [с]. (14)
На завершающем этапе разгона будем иметь
Tm0=RяJ/k2эм=0,017 [с]. (15)
Решение уравнения (11) имеет вид:
iя=
Iуi![]() +
Iнач
I
+
Iнач
I ![]()
где Iнач i - начальное значение тока на i-й ступени. В данном случае для всех ступеней
Iуi = Ic Iнач i = I1
Этому для каждой ступени ток iяi определяется уравнением (16)
iяi
= Iс![]() + I1
+ I1![]() (16)
(16)
На основании (16) время tui, в течение которого ток в якоре уменьшается на i-й ступени, определяется так:
tui
=
Тmiln![]() . (17)
. (17)
Тогда на первой стадии разгона:
tu1
=
Тm1ln![]() =0,82
[с].
. (18)
=0,82
[с].
. (18)
Тогда на второй стадии разгона:
tu2
=
Тm2ln![]() =0,21
[с].
. (19)
=0,21
[с].
. (19)
При пуске двигателя по естественной характеристике
Tио
![]() 3Тмо=0,05
[с],
,
где
Тмо
= RJ
/ k2эм
3Тмо=0,05
[с],
,
где
Тмо
= RJ
/ k2эм
Здесь ток якоря уменьшается от I1, до Ic.
Для исследования переходных процессов по скорости будем использовать упрощенную математическую модель [5]:
Tмi![]()
![]() =
=![]() уi (20)
уi (20)
где
![]() уi
–
установившаяся частота вращения
двигателя на i-й
ступени. Решение этого уравнения
имеет вид:
уi
–
установившаяся частота вращения
двигателя на i-й
ступени. Решение этого уравнения
имеет вид:
![]() =
=
![]() уi
уi
![]() +
+
![]() нач
i
нач
i![]() (21)
(21)
где
![]() нач
i
-
начальная частота вращения на i-й
ступени.
нач
i
-
начальная частота вращения на i-й
ступени.
Каждой
ступени при определении
![]() соответствует не только свое значениеTмi,
но
и свои значения начальной и установившейся
величин частоты вращения (
соответствует не только свое значениеTмi,
но
и свои значения начальной и установившейся
величин частоты вращения (![]() нач
i
,
нач
i
,
![]() уi
).
уi
).
На первом этапе пуска
![]() нач
2
=
0;
нач
2
=
0;
![]() у2
=
у2
=
![]() с2,
где
с2,
где
![]() с2
=
с2
=
![]() =
143,96 [1/с] .
=
143,96 [1/с] .
На втором этапе пуска
![]() нач
1 =
нач
1 =
![]() у2
=
143,96
[1/с].
у2
=
143,96
[1/с].
Конечная скорость на втором этапе
![]() у1
=
у1
=
![]() с1
=
с1
=![]() =154,76 [1/с].
=154,76 [1/с].
где величина RЯ1 определяется уравнением (6).
При пуске по естественной характеристике (нулевая ступень):
![]() нач
0 =
нач
0 =
![]() у1
=
154,76
[1/с].
у1
=
154,76
[1/с].
Рассмотрим
теперь переходные процессы в режиме
динамического торможения.
Для реализации этого режима якорь
двигателя отключается от сети
и замыкается на резистор RT,
а обмотка возбуждения остается под
напряжением,
Если считать, что индуктивность якорной
обмотки равна 0, то при
этом переключении ток в якорной цепи
скачком изменяется от IС
до IТ
(рис.
2), где IТ
- величина отрицательная. Рабочая точка
перемещается с естественной
характеристики 1 на характеристику
динамического торможения 2.
Далее величины iя
и
![]() уменьшаются
до нуля. Если бы после достижения
равенства
уменьшаются
до нуля. Если бы после достижения
равенства
![]() =
0
момент сопротивления не изменил своего
знака и оставался постоянным
по модулю, то двигатель изменил бы
направление вращения и достиг
частоты
=
0
момент сопротивления не изменил своего
знака и оставался постоянным
по модулю, то двигатель изменил бы
направление вращения и достиг
частоты
![]() т
при токе iя
= ic,
т
при токе iя
= ic,
где ![]() т
=
т
=
![]() (22)
(22)
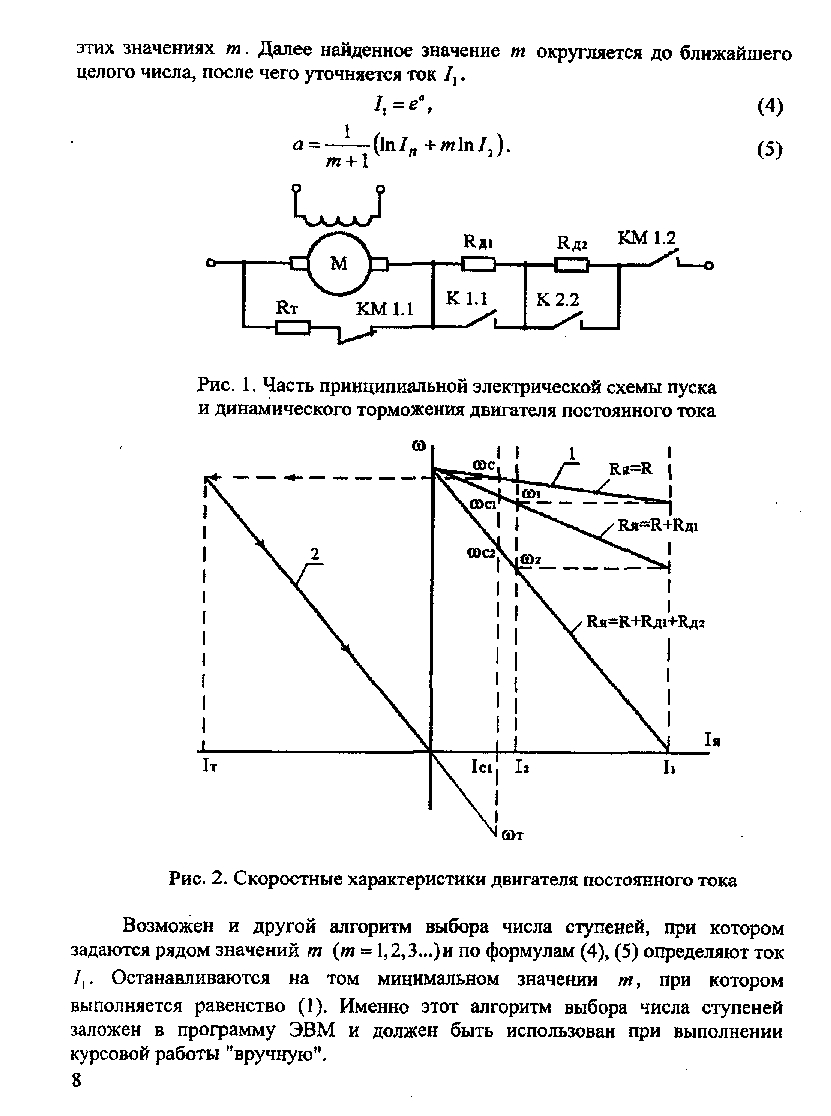
Рис. 2. Скоростные характеристики двигателя постоянного тока
Однако,
после достижения частоты вращения
![]() = 0
момент сопротивления меняет
свой знак т.е. двигатель останавливается.
Ранее указывалось, что при выполнении
этой курсовой работы момент нагрузки
представляет собой момент
сухого трения. Для определения тока
якоря во время динамического торможения
можно воспользоваться уравнением (15),
приняв:
= 0
момент сопротивления меняет
свой знак т.е. двигатель останавливается.
Ранее указывалось, что при выполнении
этой курсовой работы момент нагрузки
представляет собой момент
сухого трения. Для определения тока
якоря во время динамического торможения
можно воспользоваться уравнением (15),
приняв:
Iуi = Iс ; Iнач = IТ
При этом получим:
iя =Ic(1 – е-t/Tmg) + IТ е-t/Tmg (23)
где
Тmд
=
![]() ;
Rят
= RТ
+ R.
;
Rят
= RТ
+ R.
Для
определения изменения
![]() в
процессе динамического торможения
можно использовать
уравнение (20), приняв
в
процессе динамического торможения
можно использовать
уравнение (20), приняв
![]() уi
=
уi
=
![]() T;
T;
![]() нач
i
=
нач
i
=
![]() c
c
При этом получаем
![]() =
=
![]() T(1
– е-t/Tmg)
+
T(1
– е-t/Tmg)
+
![]() c
е-t/Tmg (24)
c
е-t/Tmg (24)
Уравнения
(23), (24) справедливы до достижения
![]() = 0.
= 0.
Учитывая,
что в конце динамического торможения
![]() =
0,
на основании (24) можно определить
время динамического торможения
=
0,
на основании (24) можно определить
время динамического торможения
tT
= Тmдln![]() , (25)
, (25)
где
![]() T
- величина отрицательная.
T
- величина отрицательная.
Для нашего случая будем иметь:
![]() т
=
т
=
![]() = -30,11 [1/с].
; Rят
= RТ
+ RЯ=
7,2 [Ом]. ; Тmд
=
= -30,11 [1/с].
; Rят
= RТ
+ RЯ=
7,2 [Ом]. ; Тmд
=
![]() =
0,21 [c].
=
0,21 [c].
tT
= Тmдln![]() =
0,38 [c].
.
=
0,38 [c].
.
Результаты расчетов сведены в табл. 2
Таблица 2
Анализ основных параметров
|
Ступень |
RДi |
Tмi |
ti |
|
|
|
2 1 0 Динамич. торможение |
7,36 1,83 0 6,60 |
0,28 0,07 0,017 0,21 |
0,82 0,21 0,05 0,38 |
0 143,96 154,76 158,68 |
143,96 154,76 158,68 0 |