

1. Исходные данные для расчетов
В исходных данных (табл.1) указаны следующие основные технические данные согласно [1,2]. Индуктивность якорной обмотки определена по ориентировочной формуле.
1. Р2Н - номинальная мощность на валу двигателя (кВт).
2. UН - номинальное напряжение (В).
3. IЯН - номинальный ток якоря (А).
4. nН - номинальная частота вращения (об/мин).
5. R - сопротивление обмотки якоря (Ом).
6. L - индуктивность обмотки якоря (Гн).
7. J - момент инерции якоря (кг.м2).
Кроме того, для выполнения курсовой работы указывается:
1. Отношение момента сопротивления нагрузки к номинальному на валу двигателя а (%).
2. Тип схемы управления: Т, С, В - соответственно управление в тока, скорости, времени.
Предполагается, что момент сопротивления нагрузки представляет собой момент сухого трения, т.е. не зависит от величины частоты вращения и изменяет свой знак при изменении направления вращения.
При расчетах и дальнейшем анализе разработанной системы управления используется математическая модель ДПТ в форме:
 (1)
(1)
где
![]() - индуктивность якоря;
- индуктивность якоря;![]() - ток якоря;
- ток якоря;![]() - активное сопротивление цепи якоря;
- активное сопротивление цепи якоря;![]() - дополнительное сопротивление, включенное
в цепь якоря;
- дополнительное сопротивление, включенное
в цепь якоря;![]() - угловая скорость якоря;
- угловая скорость якоря;![]() - приведенный момент инерции якоря;
- приведенный момент инерции якоря;![]() - момент трения в коллекторе и подшипниках;
- момент трения в коллекторе и подшипниках;![]() - момент нагрузки;
- момент нагрузки;![]() -
единый электромагнитный коэффициент,
определяемый конструкцией данного
двигателя;U
– питающее напряжение.
-
единый электромагнитный коэффициент,
определяемый конструкцией данного
двигателя;U
– питающее напряжение.
Моменты трения с достаточной точностью можно считать изменяющимся по закону:
 (3)
(3)
Момент нагрузки, в принципе может изменяться по любому закону, но в данном случае этот закон примем в виде:
 (2)
(2)
Таблица 1
Варианты заданий и исходные данные
|
Вариант |
Тип двигателя |
Номинальная мощ ность на валу кВт |
Номинальное напряжение В |
Номинальный ток якоря А |
Номинальная частота вращения об/мин |
Сопротивление обмотки якоря Ом |
Индуктивность обмотки якоря 10-3 Гн |
Момент инерции якоря 10-3 кг/м2 |
Отношение момента сопротивления к Мн в % |
Схема управления |
|
|
|
Р2Н |
UН |
IЯН |
пН |
R |
L |
J |
а |
|
|
1 |
МИ-22 |
0,37 |
60 |
8,2 |
3000 |
0,195 |
|
4 |
40 |
Т |
|
2 |
|
|
|
|
|
|
1 |
|
60 |
С |
|
3 |
МИ-22 |
0,25 |
60 |
5,5 |
2000 |
0,36 |
2 |
4 |
50 |
В |
|
4 |
|
|
|
|
|
|
|
|
70 |
Т |
|
5 |
МИ-31 |
0,45 |
60 |
10,3 |
3000 |
0,118 |
3 |
9 |
40 |
С |
|
6 |
|
|
|
|
|
|
|
|
60 |
В |
|
7 |
МИ-31 |
0,37 |
110 |
4,4 |
2000 |
0,757 |
5 |
9 |
50 |
Т |
|
8 |
|
|
|
|
|
|
|
|
40 |
В |
|
9 |
МИ-32 |
0,76 |
110 |
8,2 |
2500 |
0,237 |
1,7 |
13,25 |
35 |
С |
|
10 |
|
|
|
|
|
|
|
|
45 |
Т |
|
11 |
МИ-32 |
0,45 |
110 |
5,0 |
1500 |
0,605 |
4,5 |
13,25 |
50 |
Т |
|
12 |
|
|
|
|
|
|
|
|
60 |
В |
|
13 |
МИ-32 |
0,37 |
110 |
4,2 |
1000 |
1,46 |
8,5 |
13,25 |
70 |
С |
|
14 |
|
|
|
|
|
|
|
|
50 |
Т |
|
15 |
МИ-41 |
1,6 |
110 |
19,2 |
2500 |
0,147 |
1 |
40 |
50 |
С |
|
16 |
|
|
|
|
|
|
|
|
40 |
В |
|
17 |
МИ-41 |
1,1 |
110 |
13,0 |
1500 |
0,42 |
2,5 |
40 |
55 |
В |
|
18 |
|
|
|
|
|
|
|
|
65 |
Т |
|
19 |
МИ-42 |
3,2 |
110 |
36,3 |
2500 |
0,06 |
0,4 |
65 |
30 |
С |
|
20 |
|
|
|
|
|
|
|
|
55 |
В |
|
21 |
МИ-42 |
1,6 |
110 |
18,2 |
1500 |
0,192 |
1,5 |
65 |
45 |
Т |
|
22 |
|
|
|
|
|
|
|
|
65 |
С |
|
23 |
МИ-42 |
1,1 |
110 |
12,6 |
1000 |
0,435 |
3 |
65 |
50 |
В |
|
24 |
|
|
|
|
|
|
|
|
70 |
Т |
2. ОПРЕДЕЛЕНИЕ НОМИНАЛЬНЫХ ПАРАМЕТРОВ
По исходным данным определяют ряд величин, которые используются в дальнейшем расчете:
Номинальная частота вращения в системе СИ
![]() =
=![]() nH
nH
![]() .
.
Единый электромагнитный коэффициент
![]() эм
=
эм
=

3. Номинальный электромагнитный момент
Мн
= kЭМIЯН
![]()
4. Номинальный момент на валу двигателя
![]() М2Н
=
М2Н
=
![]()
![]()
5. Момент потерь
М0
= МТ=
МН
-
М2Н
![]()
6. Полный момент сопротивления
Мс
=МТ+МНГ=
![]()
![]()
7. Ток якоря, соответствующий моменту сопротивления Мс
![]()
![]() =
=
![]()
![]()
8.
Частота вращения двигателя при токе
![]()
![]()
![]()
3. РАСЧЕТ ЧИСЛА СТУПЕНЕЙ ПУСКА
На рис. 1 представлена часть принципиальной электрической схемы пуска и динамического торможения двигателя постоянного тока, а на рис. 2 - его скоростные характеристики.
В рассматриваемом примере число пусковых резисторов т равно двум. В общем случае число пусковых резисторов может быть как больше, так и меньше двух, например, 1, 2, 3, 4, 5 и т.д. Эта величина определяется максимальным и минимальным токами (I1, I 2) при замыкании накоротко пусковых резисторов. Согласно [3]:
I1=![]() IЯН (1)
IЯН (1)
I2=![]() Iс (2)
Iс (2)
Расчет числа пусковых резисторов (числа ступеней) может быть выполнен графоаналитически или аналитически. С графоаналитическим расчетом можно ознакомиться, например, в[1], § 4.2.
При аналитическом расчете примерное число ступеней m определяется соотношением [3]:
m = (lnIn/I1)/(lnI1/I2),
где In - величина максимального пускового тока при отсутствии добавочных резисторов
![]() (3)
(3)
Величина m должна быть целым числом. Для достижения этого рекомендуется сначала принять средние значения I1 и I 2 и определить при этих значениях m. Далее найденное значение m округляется до ближайшего целого числа, после чего уточняется ток I1
I1 = еа, (4)
а
=
![]() (5)
(5)
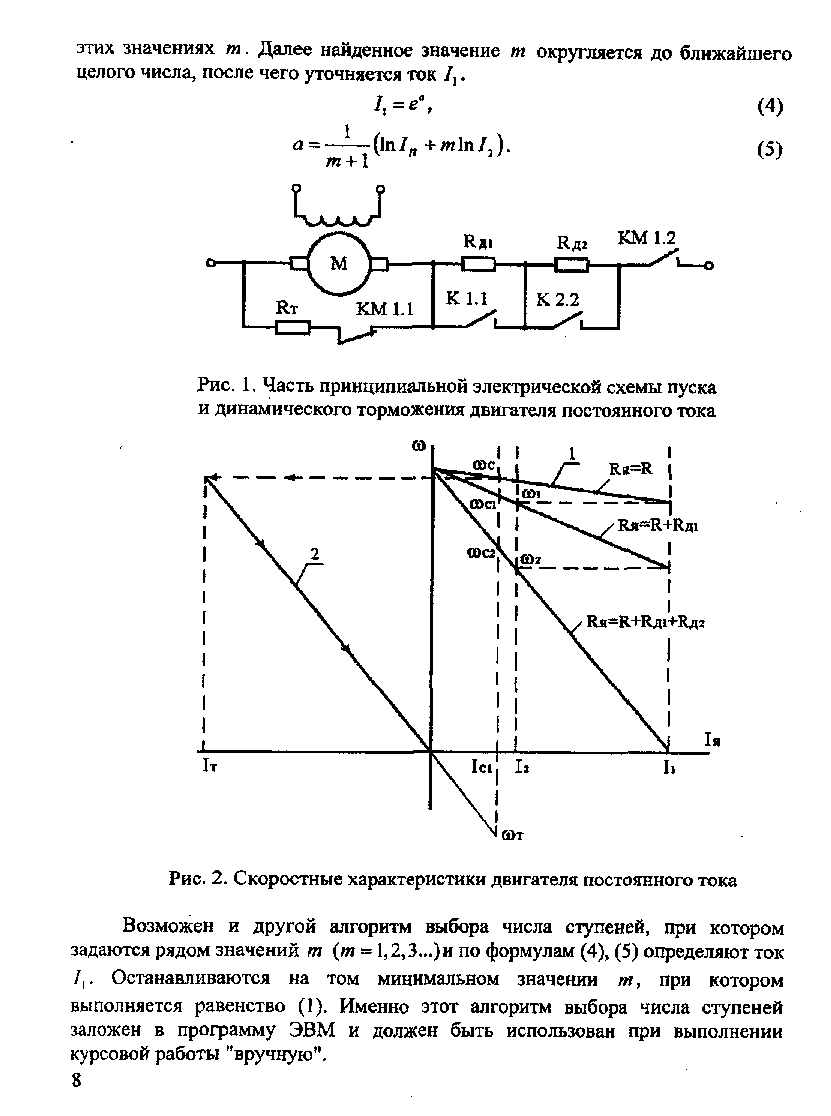
Рис. 1. Часть принципиальной электрической схемы
пуска и динамического торможения двигателя постоянного тока
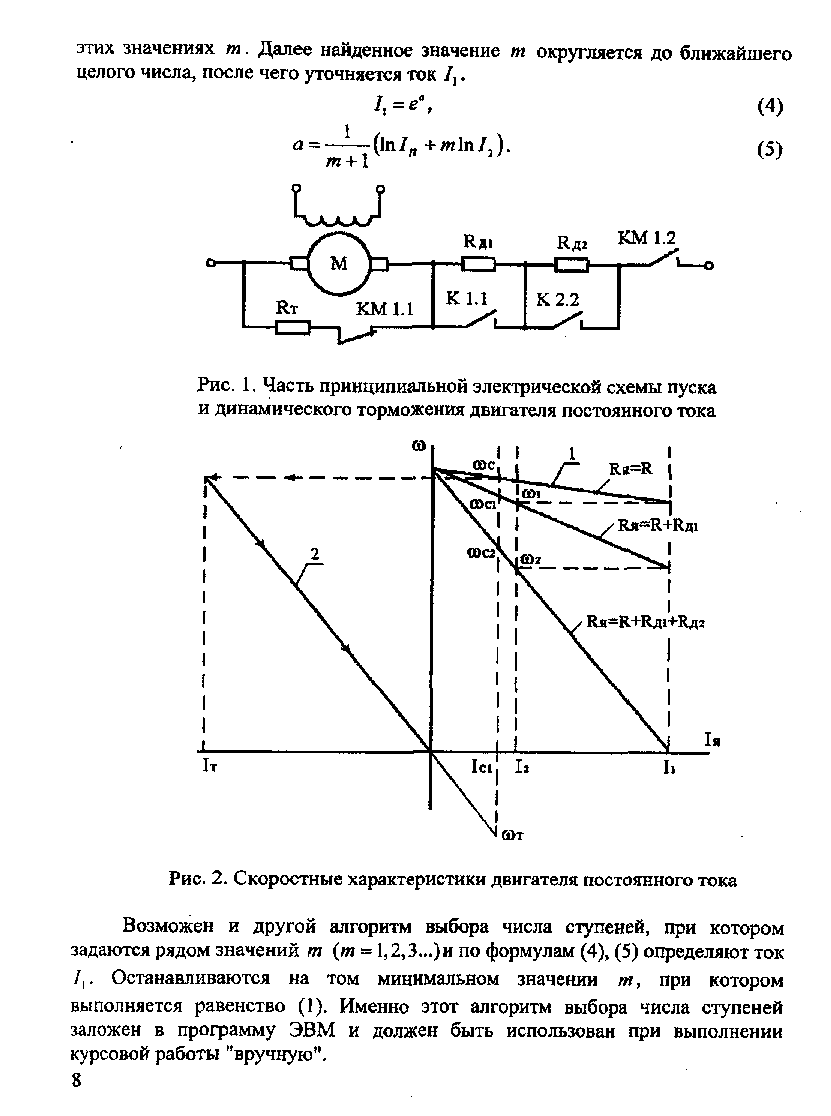
Рис. 2. Скоростные характеристики двигателя постоянного тока
Возможен и другой алгоритм выбора числа ступеней, при котором задаются рядом значений m (m= 1,2,3...) и по формулам (4), (5) определяют ток I1. Останавливаются на том минимальном значении m, при котором выполняется равенство (1).
С точки зрения равномерности нагрузки сети и благоприятного режима работы ДПТ было бы рационально иметь на каждом из этапов пуска равные максимальные пусковые токи. Попробуем реализовать такой подход.
1. Пуск с одним добавочным резистором.
Так как в начале первого этапа пуска якорь неподвижен, максимальный пусковой ток на этом этапе будет равен:
![]() , (6)
, (6)
где RД – сопротивление дополнительного резистора.
Если дополнительный резистор будет отключаться при токе якоря равном I2, то в этот момент угловая скорость будет равна:?
![]() . (7)
. (7)
Тогда максимальный ток на втором этапе пуска будет равен:
![]() . (8)
. (8)
Приравнивая правые части (6) и (8), получим:
![]() . (9)
. (9)
Или
![]() . (10)
. (10)
Решая квадратное уравнение (10), получим искомое значение RД. Решение можно искать вручную, а можно с использованием математического инструментария Mat Lab (оператор roots(P), где Р – матрица строка коэффициентов уравнения). Естественно, решения, не отвечающие физическому смыслу нужно отбросить.
Найденное решение подставляем в (6) и проверяем выполнение условия:
![]() . (11)
. (11)
Если условие (11) выполняется, то задача решена. Если не выполняется, то необходимо перейти к рассмотрению пуска с двумя дополнительными резисторами.
2. Пуск с двумя дополнительными резисторами.
Пусть система имеет два дополнительных резистора RД1 и RД2. Причем после первого этапа пучка отключается резистор RД1, а после второго – резистор RД2. Тогда максимальный ток на первом этапе пуска будет равен:
![]() . (12)
. (12)
Далее, рассуждая аналогично случаю пуска с одним резистором, получим уравнение третьей степени относительно RД2.
![]() . (13)
. (13)
Решая его, найдем четыре корня, из которых необходимо отобрать один, исходя из критерия физической реализуемости. Затем по формуле:
![]() (14)
(14)
рассчитывается сопротивление резистора RД1. Подставляя найденные значения сопротивлений в (12), найдем максимальный пусковой ток, а затем проверим выполнение условия (11). Если оно выполняется, то задача успешно решена.
Внимание!!! Здесь и далее первым этапом пуска будем считать руск при всех включенных дополнительных резисторах. Первый этап заканчивается отключение резистора R1, второй – R2, и т.д.
Пример. Пусть R=0,2 Ом; U=60В; I2=5,3 А; I1=25 А.
Проверим возможность пуска двигателя с одним дополнительным резистором. Подставляя исходные данные в уравнение (5в), получим:
![]() . (15)
. (15)
Решим это уравнение с использованием MatLab:
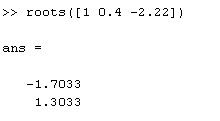
Так
как сопротивление не может быть
отрицательным, выберем
![]() .
.
Подставляя
в (6), найдем максимальный пусковой ток
![]() А.
Следовательно, условие (11) не выполняется.
А.
Следовательно, условие (11) не выполняется.
Проверим возможность запуска двигателя с двумя дополнительными резисторами. Подставляя исходные данные в уравнение (13), получим:
![]() . (16)
. (16)
Решая его с использованием MatLab, получим:
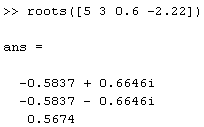
Так
как сопротивление не может быть
комплексно-сопряженным, выберем
![]() .
.
Подставляя
![]() в формулу (14), найдем
в формулу (14), найдем![]() .
Подставляя результаты в (12), найдем
максимальный пусковой ток:
.
Подставляя результаты в (12), найдем
максимальный пусковой ток:
![]() А. (17)
А. (17)
Условие (11) выполняется, следовательно, задача решена.
При определении сопротивления резистора для динамического торможения Rr исходят из того, что максимальный ток при динамическом торможении не должен превосходить по величине ток I1.
Поэтому
![]() . (18)
. (18)