

Курсовая работа
по дисциплине «Технические средства автоматизации и управления»
Тема работы:
«Управляемый разгон двигателя постоянного ток»
Выполнил
Студент гр. УИТ-41
Проверил
.
Саратов 2011
РЕФЕРАТ
Объем работы 16 страниц, она содержит 7 рисунков, 3 таблицы, 26 формул.
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА , РАЗГОН, ТОРМОЖЕНИЕ, СИСТЕМА УПРАВЛЕНИЯ, КОММУТАЦИЯ, ДОПОЛНИТЕЛЬНЫЕ РЕЗИСТОРЫ, СЕМИСТОРЫ, МИКРОПРОЦЕССОР, ТОК ЯКОРЯ.
В работе рассматривался автоматизированный пуск двигателя постоянного тока при условии ограничения тока якоря. Исходя из упрощенной модели процесса было рассчитано сопротивление пусковых резисторов, время этапов пуска и угловые скорости якоря на соответствующих этапах. Результаты расчетов были проверены математическим моделированием, исходя из более полной модели объекта. Разработана принципиальная электрическая схема системы автоматического управления пуском.
1. Введение и постановка задачи
Двигатели постоянного тока независимого возбуждения наиболее часто используются в системах автоматики так как они очень просты в управлении и имеют привлекательные с точки зрения разработчика механические характеристики. Однако при подключении двигателей постоянного тока средней и большой мощности к источнику питания могут возникнуть проблемы, так как в момент включения ток якоря ограничивается только активным сопротивлением якоря. Сопротивление якоря двигателя довольно мало, поэтому ток в момент включения достигает очень больших значений и может вывести из строя сеть, источник питания, да и сам двигатель.
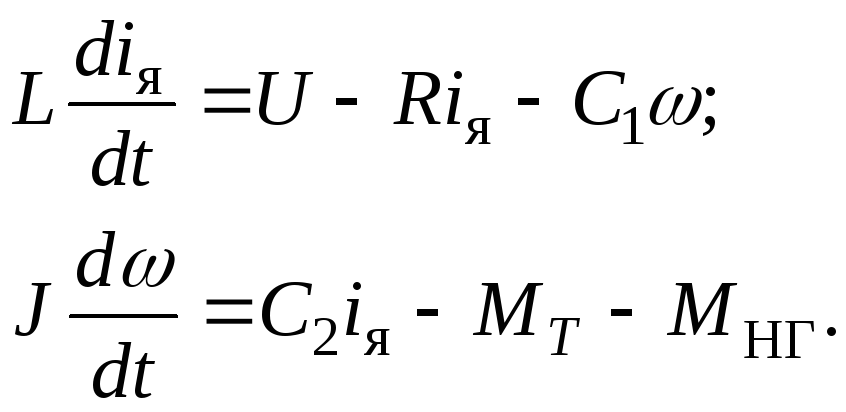
В самом деле, с достаточно высокой точностью математическую содель двигателя постоянного тока можно представить в виде [ 4 ]:
 (1)
(1)
где
![]() - индуктивность якоря;
- индуктивность якоря;![]() - ток якоря;
- ток якоря;![]() - активное сопротивление цепи якоря;
- активное сопротивление цепи якоря;![]() - угловая скорость якоря;
- угловая скорость якоря;![]() - приведенный момент инерции якоря;
- приведенный момент инерции якоря;![]() - момент трения в коллекторе и подшипниках;
- момент трения в коллекторе и подшипниках;![]() - момент нагрузки;
- момент нагрузки;![]() - постоянные коэффициенты, определяемые
конструкцией данного двигателя;U
– питающее напряжение.
- постоянные коэффициенты, определяемые
конструкцией данного двигателя;U
– питающее напряжение.
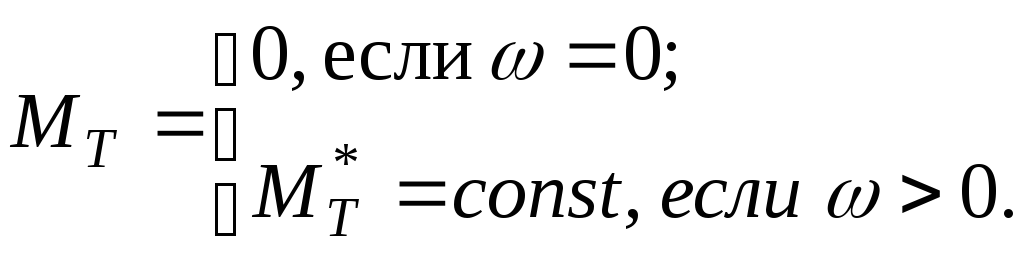
Моменты трения с достаточной точностью можно считать изменяющимся по закону:
 (3)
(3)
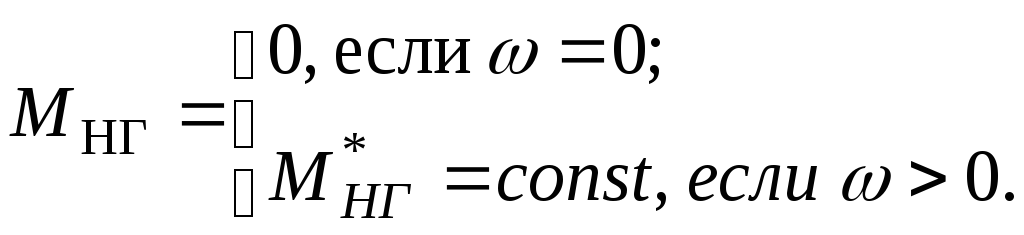
Момент нагрузки, в принципе может изменяться по любому закону, но в данном случае этот закон примем в виде:
 (2)
(2)
Первое уравнение системы (1) описывает динамику электромагнитных процессов в двигателе, второе – электромеханические. В уравнениях (1) это приводит к тому, что правая часть второго уравнения будет отлична от нуля только, если выполняется условие:
![]() . (4)
. (4)
Коэффициенты
![]() имеют совершенно различную размерность,
но обычно они очень близки по модулю,
поэтому в дальнейшем будем называть их
единым электромагнитным коэффициентом
и обозначать
имеют совершенно различную размерность,
но обычно они очень близки по модулю,
поэтому в дальнейшем будем называть их
единым электромагнитным коэффициентом
и обозначать![]() .
.
Так
как электромагнитные процессы в якоре
протекают на порядок быстрее
электромеханических, то при включении
двигателя в сеть через очень короткий
промежуток времени
![]() ,
а угловая скорость не успеет увеличиться
и
,
а угловая скорость не успеет увеличиться
и![]() .
Поэтому в первый момент после включения
ток якоря будет определяться выражением:
.
Поэтому в первый момент после включения
ток якоря будет определяться выражением:
![]() . (5)
. (5)
Естественно,
если
![]() - активному сопротивлению якоря, которое
очень мало, то ток может достигать очень
больших значений. Поэтому при запуске
двигателей постоянного тока средней и
большой мощности последовательно с
якорем подключают один или несколько
резистров, последовательно отключая
их при достижении якорем определенных
оборотов. То есть
- активному сопротивлению якоря, которое
очень мало, то ток может достигать очень
больших значений. Поэтому при запуске
двигателей постоянного тока средней и
большой мощности последовательно с
якорем подключают один или несколько
резистров, последовательно отключая
их при достижении якорем определенных
оборотов. То есть
![]() . (6)
. (6)
Для этого применяют схему, которую обобщенно можно представить, как показано на рис. 1.
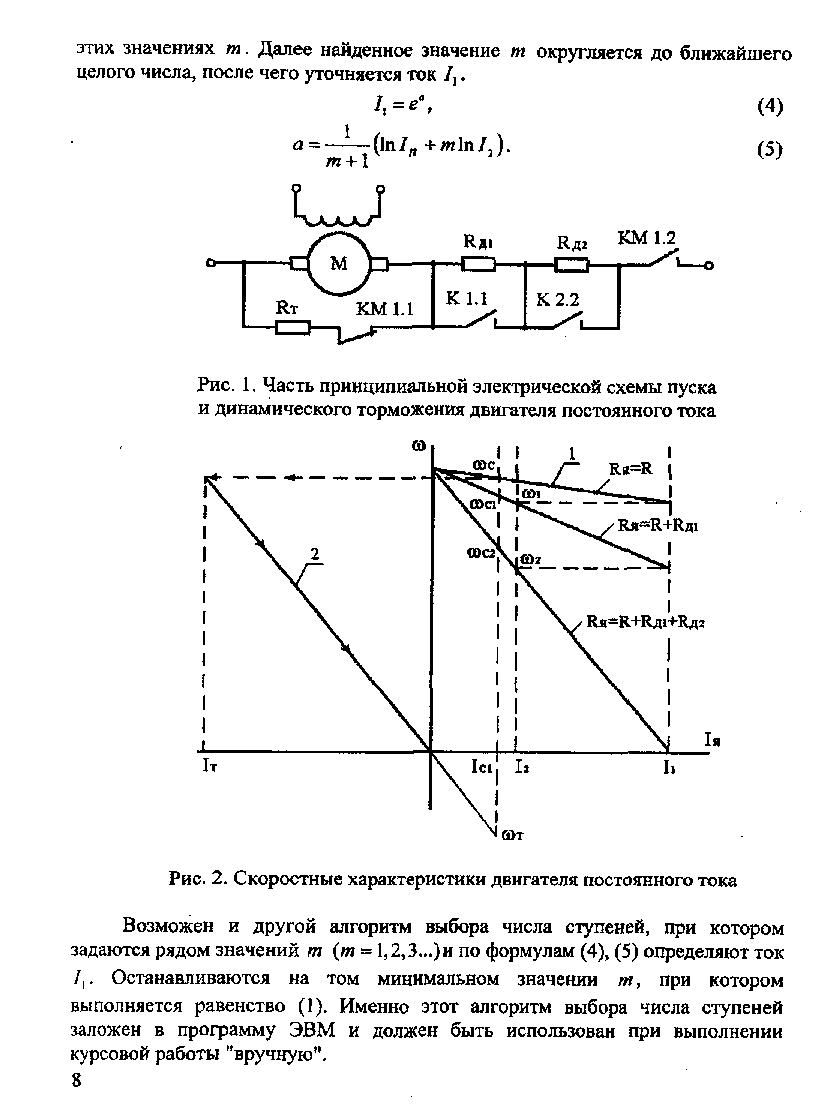
Рис. 1. Часть принципиальной электрической схемы
пуска и динамического торможения двигателя постоянного тока
В
настоящее время в качестве контактов
К1.1 и К1.2 применяются электронные элемент,
в частности семисторы, а управление ими
осуществляется с помощью микропроцессоров.
Резистор
![]() ,
и контакт КМ1.1 используются для ограничения
тока при динамическом торможении
двигателя.
,
и контакт КМ1.1 используются для ограничения
тока при динамическом торможении
двигателя.
Цель работы:
Рассчитать количество и сопротивление дополнительных резисторов включаемых в цепь якоря при разгоне и торможении, исходя из выполнения условия:
![]() , (7)
, (7)
где
![]() - ток якоря при номинальном моменте
нагрузки.
- ток якоря при номинальном моменте
нагрузки.
Рассчитать параметры переходных процессов пуска и торможения, используя упрощенную математическую модель двигателя.
Проверить параметры переходных процессов методом математического моделирования на ЭВМ.
Разработать обобщенную электрическую принципиальную схему системы управления пуском двигателя и описать ее работу.
Исходные данные:
Таблица 1.
|
№ варианта |
Тип двигателя |
Номинальная мощность навалу, Вт |
Номинальное напряжение, В |
Номинальный ток якоря, А |
Номинальная частота вращения, об/мин |
Сопротивление якоря, Ом |
Индуктивность якоря, ·10-3, Гн |
Момент инерции якоря, 10-3, кг/м2 |
Отношение момента сопротивления к моменту нагрузки, % |
Схема управления |
|
|
|
|
|
|
|
|
L |
J |
α |
|
|
30 |
МИ-32 |
450 |
110 |
5,0 |
1500 |
0,605 |
4,5 |
13,25 |
55 |
Т |