

Frisk_2
.pdf (рис.12.3.20) , переходим в
(рис.12.3.20) , переходим в (рис.12.3.22), переходим в режим расчета амплитудной характеристики синхронного детектора. Заданные пределы изменения
(рис.12.3.22), переходим в режим расчета амплитудной характеристики синхронного детектора. Заданные пределы изменения (рис.12.2.56) должны совпадать с пределами, указан-
(рис.12.2.56) должны совпадать с пределами, указан- (рис.12.2.51) (рис.12.26) в колонке
(рис.12.2.51) (рис.12.26) в колонке (рис.12.2.82).
(рис.12.2.82). 2 , являющееся амплитудой напряжения на выходе опорного генератора V3 (рис. 12.16). По оси ординат откладывается, рассчитанное в очень узком интервале времени (2 мкс), значение выходного напряжения (амплитуда напряжения на выходе СД).
2 , являющееся амплитудой напряжения на выходе опорного генератора V3 (рис. 12.16). По оси ординат откладывается, рассчитанное в очень узком интервале времени (2 мкс), значение выходного напряжения (амплитуда напряжения на выходе СД). (рис.12.2.25) и пределов варьирования амплитуды напряжения опорного генератора (подменю
(рис.12.2.25) и пределов варьирования амплитуды напряжения опорного генератора (подменю  , рис.12.3.4).
, рис.12.3.4).
Рис.12.27 |
Рис.12.28 |
Одновременно скорректируйте пределы изменения амплитудной характеристики по оси абсцисс  (рис.12.2.82) ординат
(рис.12.2.82) ординат (рис.12.2.83) (рис.12.29).
(рис.12.2.83) (рис.12.29).
Рис.12.29
Распечатку графика амплитудной характеристики для указанных условий приложите к отчету.
Амплитудная характеристика синхронного детектора по напряжению сигнала
Методика расчета амплитудной характеристики по напряжению сигнала сходна, с рассмотренной выше, при расчете амплитудной характеристики по напряжению опорного генератора. Отличие состоит в том, что теперь варьируется амплитуда напряжения входного сигнала (генератора GS, V4 на рис.12.30) при постоянной амплитуде напряжения опорного генератора (рис.12.31).
641

Рис.12.30 |
Рис.12.31 |
Проведите расчет амплитудной характеристики по напряжению сигнала для условий, определяемых подменю  (рис.12.2.51) (рис.12.32)
(рис.12.2.51) (рис.12.32)
Рис.12.32
Распечатку результатов моделирования приложите к отчету.
4.2.6 Фазовая характеристика синхронного детектора
Для получения фазовой характеристики синхронного детектора воспользуемся принципиальной схемой (рис.12.33)
642
Рис.12.33
В качестве источника сигнала и опорного генератора используются источники гармонических сигналов DG и DS (рис.12.34).
Рис.12.34 |
Рис.12.35 |
Параметры источников отображаются в текстовом файле на экране монитора при
использовании закладки  (рис.12.2.24) в нижней части окна меню схем (рис.12.33). Параметры, отсутствующие в описании модели, принимаются по умолчанию. При проведении моделирования параметры источника сигнала будем оставлять без изменения, а фазу источника опорного сигнала будем изменять через 10о (π /18). Пределы и закон изменения фазы опорного генератора DG (V3) задаем в подменю
(рис.12.2.24) в нижней части окна меню схем (рис.12.33). Параметры, отсутствующие в описании модели, принимаются по умолчанию. При проведении моделирования параметры источника сигнала будем оставлять без изменения, а фазу источника опорного сигнала будем изменять через 10о (π /18). Пределы и закон изменения фазы опорного генератора DG (V3) задаем в подменю 
(рис.12.3.4) (рис.12.35): изменяемый компонент (V3) выбирается с помощью левой ли-
643

нейки прокрутки строке в  (рис.12.3.23) , а изменяемый параметр (
(рис.12.3.23) , а изменяемый параметр ( ) (рис.12.3.24) – с помощью правой.
) (рис.12.3.24) – с помощью правой.
Разность фаз немодулированных напряжений опорного и сигнального генераторов определяется значением постоянного напряжения на выходе синхронного детектора с вычетом величины постоянного напряжения в узле (V(30)), определяющегося режимом работы активных компонентов ИМС. Величина постоянных напряжений в узлах схемы определяется последовательным выполнением: Analysis → Dynamic DC…→ Dynamic DC
Limits → Node Voltages → OK .
Постоянное напряжение на выходе синхронного детектора, определяющееся как среднее значение  (рис.12.3.25)напряжения в установившемся режиме на относительно малом промежутке времени в три микросекунды (столбец
(рис.12.3.25)напряжения в установившемся режиме на относительно малом промежутке времени в три микросекунды (столбец
(рис.12.2.81) подменю  (рис.12.2.51) рис.12.36)
(рис.12.2.51) рис.12.36)
Рис.12.36
Полученное семейство значений выходного напряжения (полное время расчета составляет примерно 5 минут) соответствует стационарному режиму (после завершения переходных процессов). Значения выходного напряжения будем определять на момент окончания расчетов (T = 5 мс.). Для этого воспользуемся методом двух курсоров, определяя значение напряжения в узле (V(30)) при Т = 5 мс, выполнив: активировав пиктограм-
му  (рис.12.3.26) (Peak), левым кнопкой мыши выбираем пиктограмму
(рис.12.3.26) (Peak), левым кнопкой мыши выбираем пиктограмму  (рис.12.3.27)
(рис.12.3.27)
(Go To X) и на выпадающем подменю |
(рис.12.3.28) указываем время |
(рис.12.3.29) определения значений функции |
(рис.12.2.21). Затем активируя |
пиктограмму  (рис.12.3.30) (Go TO B ranch) переходим в подменю
(рис.12.3.30) (Go TO B ranch) переходим в подменю  (рис.12.3.31), где с помощью линейки прокрутки
(рис.12.3.31), где с помощью линейки прокрутки  (рис.12.3.32) выбираем значения
(рис.12.3.32) выбираем значения
фазы опорного генератора, например ноль радиан и нажимаем кнопку 
(рис.12.3.33), а затем 3.1459 радиан и нажимаем кнопку  (рис.12.3.34). Кривые, соответствующие этим значениям фазы опорного генератора, отображаются красным и
(рис.12.3.34). Кривые, соответствующие этим значениям фазы опорного генератора, отображаются красным и
644

 (рис.12.3.36)C
(рис.12.3.36)C (рис.12.2.51). Полученные значения напряжения на выходе детектора используйте для построения фазовую характеристику, которую постройте в одной системе координат совместно с, рассчитанной для нормальной температуры. Полученные характеристики приложите к отчету.
(рис.12.2.51). Полученные значения напряжения на выходе детектора используйте для построения фазовую характеристику, которую постройте в одной системе координат совместно с, рассчитанной для нормальной температуры. Полученные характеристики приложите к отчету.
7 Краткие теоретические сведения
Детекторы амплитудно-модулированных сигналов
Приемники радиовещательных сигналов, обладающих относительно низкой чувствительностью, широко используют для детектирования сигналов с амплитудной модуляцией простейшие диодные амплитудные детекторы (АД), работающие в линейном режиме [1,3]. Это позволяет обеспечивать минимальные нелинейные искажения в приемнике, обусловленные детектором. Повышение чувствительности радиоприемников одновременно с освоением области высоких и очень высоких частот (декаметровый и метровый диапазон длин волн), уменьшает уровень входного сигнала и как следствие, переводит работу АД в режим квадратичного детектирования. Использование нелинейного участка характеристики детектирования, при воздействии одного слабого АМ сигнала, увеличивает уровень нелинейных искажений. Одновременное воздействие на входе детектора слабого полезного и сильного мешающего воздействий, приводит в безинерционном АД к подавлению слабого сигнала сильным, что внешне проявляется в том, что вблизи настройки на мощную станцию сигналы соседних станций не обнаруживаются.
Синхронный детектор широко применяется в аналоговых стереофонических приемниках спутникового радиовещания и многоканальных системах связи, а так же в системах подвижной связи, в структуре I-Q демодуляторов и узлов синтезаторов частот [4,5]. При этом безинерционный детектор, работающий в режиме сильных сигналов, улучшает отношение сигнал/помеха. Условия лучшего прохождения полезного сигнала через детектор можно создать за счет введения в цепь детектора большого напряжения специального гетеродина, которое увеличивает напряжение несущей частоты полезного сигнала. В этих условиях полезный сигнал, с искусственно увеличенной несущей за счет напряжения гетеродина, выступает как сильный сигнал, обеспечивающий подавление всех других сигналов, подводимых к детектору.
Структурная схема синхронного детектора фактически совпадает со схемой фазового детектора, при постоянной фазе входного сигнала (рис.12.37).
Рис.12.37
Под воздействием генератора периодически, с частотой гетеродина, изменяется параметр (обычно крутизна) преобразовательного элемента. По принципу действия это совпадает с работой преобразователя частоты. Отличие наблюдается лишь в реализации фильтра на выходе детектора, являющего фильтром низкой частоты, выделяющим полезный продукт преобразования – спектр, определяющий характер изменения во времени амплитуды входного сигнала. Частоту гетеродина выбирают равной частоте несущего колебания на входе детектора: f г = fc, т.е. гетеродин должен быть синхронным с входным воздействием. Ток i2 на выходе преобразовательного элемента при условии постоянства ампли-
646
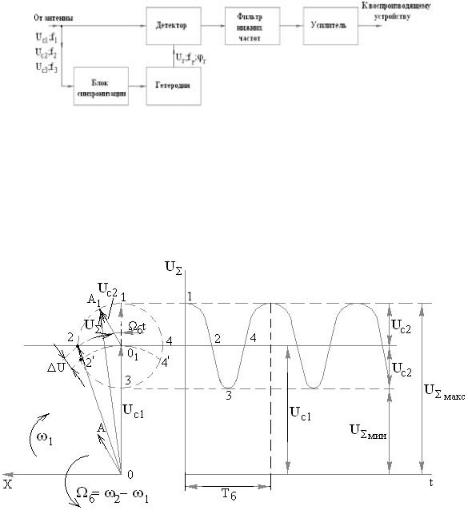
Рис.12.38
В реальных условиях на входе приемника действует одновременно несколько сигналов различного уровня (Uc1, Uc2, Uc3, … – амплитуды несущих колебаний на соответствующей частоте f1, f2, f3 , …). Предположим, что сигнал на частоте f1 обладает большей амплитудой (Uc1> Uc2) по сравнению с сигналом на частоте f2, при этом f1< f2. Рассмотрим процесс детектирования при одновременном воздействии только этих двух сигналов с помощью векторной диаграммы. Полагая, что плоскость вращается с угловой скоростью ω1 , тогда первое колебание с амплитудой Uc1 будет представлено неподвижным вектором ОО1 (рис.12.39), проектируемым на ось ОХ.
Рис.12.39
Другое колебание с амплитудой Uc2 представлено вектором ОА, вращающимся с частотой биений Ωб = ω2 −ω1 . Амплитуда суммарного колебания UΣ определяется геометриче-
ской суммой векторов Uc1 и Uc2. Конец вектора О1А1 описывает окружность, проходящую через точки 1, 2, 3, 4, поэтому вектор результирующего колебания будет изменяться от своего максимального значения UΣ макс =Uc1 +Uc2 (точка 1) до минимального
UΣмин =Uc1 −Uc2 (точка 3), покачиваясь вокруг вектора ОО1. Это указывает на то, что результирующее колебание содержит не только изменения амплитуды, но и изменения частоты, которые происходят с разностной частотой Ωб = ω2 −ω1 , называемой частотой бие-
ний. При вращении вектора О1А1 амплитуда результирующего колебания окажется равной вектору ОО1 (Uc1) в точке 2'. Минимальное значение суммарное колебание принимает в точке 3, а в точке 4 ' — амплитуда снова окажется равной Uc1. При равномерном вращении вектора О1А1 (ω2 = const), промежуток времени, за который результирующая амплитуда превышает длину вектора ОО1, определяемый длиной дуги 2' 1 4', оказывается больше половины окружности. Это указывает на то, что продолжительность положитель-
648


