

10.3. Самонастраивающиеся системы со стабилизацией качества управления
Адаптивные САУ делятся на САУ со стабилизацией и с оптимизацией качества управления. Задачей САУ со стабилизацией качества управления является удержание критерия качества
управления |
J |
на определенном уровне или в определенном |
диапазоне. Контур адаптации выполняет здесь задачу стабилизации этого критерия. В САУ с оптимизацией качества управления обеспечивается и поддержание оптимального значения критерия качества.
В названных системах адаптация заключается в стабилизации
заданного значения критерия качества |
J |
путем изменения настройки |
|
основного управляющего устройства |
|
УУо |
(см. рис. 10.1). Это |
осуществляется с помощью настроечных параметров, которые при ручной настройке должны устанавливаться человеком, а в данном случае изменяются автоматически специальным исполнительным устройством, входящим в состав управляющего устройства адаптации УУа .
Основное распространение получили самонастраивающиеся САУ такого типа для стабилизации динамических свойств систем. Критериями качества при этом являются различные косвенные критерии качества переходных процессов (корневые, частотные, интегральные), статистический критерий точности в виде среднеквадратичного отклонения и непосредственно динамические характеристики объекта, т. е. его частотные и переходные характеристики.
На рис. 10.3, а показана функциональная схема САУ со стабилизацией динамических свойств. На этой схеме показаны основная САУ и управляющее устройство адаптации. Последнее
состоит из генератора |
ГПР |
пробных сигналов Gпр , детектора |
Д этих |
|
|
|
сигналов на выходе объекта ОУ, |
вычислительного устройства |
ВУ |
и |
исполнительного устройства ИУ . |
|
|
|
Пробный сигнал является специально выбранным воздействием на систему, по реакции на которое можно определять текущее значение выбранного критерия качества. Детектор Д служит для выделения из общего выходного сигнала X , обусловленного всеми
259
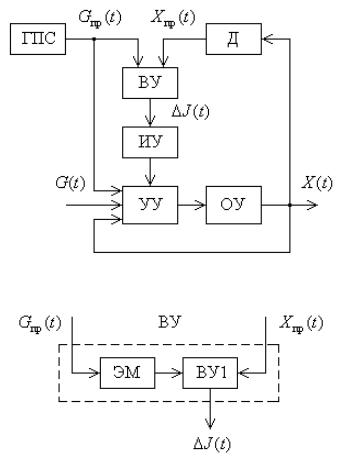
внешними воздействиями, приложенными к системе, составляющей X пр вызванной именно пробным сигналом Gпр .
а
б
Рис. 10.3. Функциональная схема самонастраивающейся САУ со стабилизацией динамических свойств
Вычислительное |
устройство |
ВУ |
по |
величине |
входного |
пробного воздействия |
Gпр и реакции |
X пр |
системы на него вычисляет |
||
величину отклонения |
J критерия качества |
от его |
заданного |
||
значения и подает соответствующий сигнал на исполнительное
устройство |
ИУ . Последнее обычно представляет собой звено |
интегрирующего типа. Оно изменяет настройку управляющего устройства основного контура в направлении, соответствующем знаку отклонения J . В качестве настроечных параметров в УУ выбираются такие параметры, изменяя которые, можно в необходимых пределах изменять величину выбранного критерия J . Ими могут быть параметры корректирующих и основных звеньев системы. На рис. 10.3, а изображена одноконтурная схема основной
260
САУ. В действительности она может иметь любую структуру.
На рис. 10.3, б показан распространенный вариант вычислительного устройства ВУ с эталонной моделью (ЭМ). Модель имеет динамические характеристики, являющиеся эталоном для подстраиваемой под нее основной САУ. Применение модели упрощает вычислительное устройство, так как отклонение критерия
качества |
J |
от его заданного значения определяется здесь как |
достаточно простая функция разности сигналов на выходе этой модели и объекта. (Эта операция требует более простого вычислительного устройства, обозначенного на рис. 10.3, б как ВУ1.)
В качестве пробного сигнала |
X пр.з |
применяют ступенчатый и |
импульсный сигналы, гармонический сигнал, случайный сигнал, например белый шум, или, наконец, используют приложенные к системе естественные воздействия. Выбор пробного сигнала определяется видом критерия качества J , т. е. теми динамическими характеристиками системы, которые требуется контролировать.
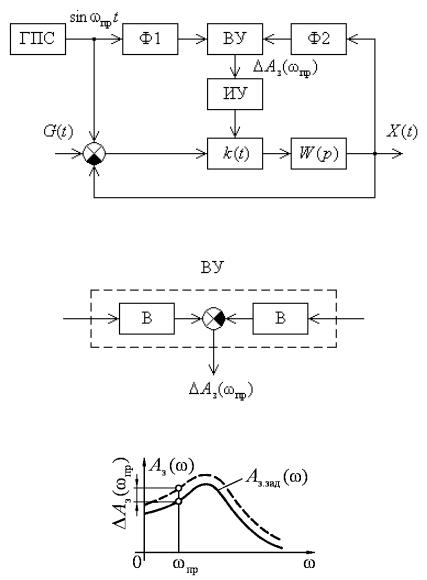
Вместо косвенных показателей качества переходного процесса можно стабилизировать непосредственно частотные или переходные характеристики системы или же коэффициенты ее передаточной функции. Так, частотную характеристику стабилизируют в отдельных точках, стабилизируя, например, резонансную частоту или ординаты характеристики, соответствующие, определенным значениям частоты. На рис. 10.4, а приведена схема самонастраивающейся САУ
со |
стабилизацией |
одной |
точки |
амплитудной |
частотной |
||
характеристики, соответствующей частоте ωпр |
выдаваемой |
||||||
генератором |
ГПС . Настройка осуществляется путем изменения |
||||||
коэффициента |
усиления |
k у |
основного |
управляющего |
устройства. |
||
Фильтр Ф1 представляет собой эталонную модель (см. рис. 10.3, б), ордината амплитудной частотной характеристики которой на частоте
ω |
пр |
соответствует требуемой ординате |
A |
(ω |
пр |
) |
частотной |
|
|
з.зад |
|
|
|
характеристики настраиваемой замкнутой системы. Узкополосный фильтр Ф 2 служит для выделения колебательной составляющей выходной величины X с частотой ωпр . Вычислительное устройство
ВУ (рис. 10.4, б) |
|
сравнения, |
на |
пропорциональный
состоит из двух выпрямителей В и элемента выходе которого получается сигнал, отклонению Aз (ωпр ) ординаты амплитудной
261
частотной характеристики
10.4, в).
A |
(ω |
пр |
) |
з |
|
|
а
б
от заданного значения (рис.
в
Рис. 10.4. Схема самонастраивающейся САУ со стабилизацией амплитудной частотной характеристики в точке ωпр
Исполнительное устройство ИУ состоит из усилителя У и вспомогательного двигателя ВД , перемещающего движок потенциометра, с помощью которого регулируется коэффициент усиления k у .
Для стабилизации нескольких точек частотной характеристики применяют соответствующее количество точно таких же контуров
262
самонастройки, каждый из которых работает на своей частоте
ωпр
.
Исполнительное устройство каждого контура воздействует на свой настроечный параметр, общее число которых, таким образом, равно числу контролируемых точек частотной характеристики.
С помощью подобной же схемы можно стабилизировать и фазовую частотную характеристику. В этом случае вычислительное устройство должно давать соответственно не разность амплитудAз (ωпр ) , а разность фаз з. (ωпр ) колебаний на выходе фильтров
Ф1 и Ф 2 .
Необходимость контролировать сразу две частотные характеристики – амплитудную и фазовую – возникает только в неминимально-фазовых системах. В минимально-фазовых системах достаточно стабилизировать одну из них, в качестве которой обычно берут амплитудную характеристику, поскольку в этих системах указанные характеристики однозначно друг с другом связаны.
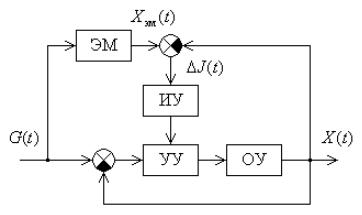
На рис. 10.5 показана схема самонастраивающейся системы, в которой вместо пробного сигнала используется входное воздействие G(t) и параллельная эталонная модель в вычислительном устройстве
ВУ .
К контуру самонастройки предъявляются следующие два основных требования:
а) быстродействие контура должно быть больше скорости изменения стабилизируемых динамических свойств основной САУ;
б) пробные сигналы должны быть достаточно малы, так как они представляют собой помеху для работы основной САУ.
Рис. 10.5. Функциональная схема самонастраивающейся САУ с параллельной эталонной моделью
263
10.4. Самонастраивающиеся системы с оптимизацией качества управления
Эти системы называются еще экстремальными самонастраивающимися САУ. В отличие от рассмотренных выше самонастраивающихся САУ со стабилизацией качества управления задачей самонастройки в этих САУ является поддержание
оптимального значения критерия качества управления |
J . Последний |
в данном случае может быть назван поэтому критерием оптимальности САУ. Рассматриваемые самонастраивающиеся САУ, как и вообще все адаптивные САУ с оптимизацией качества управления, отличаются от неадаптивных оптимальных САУ наличием автоматического изменения оператора управления так, чтобы обеспечивалась оптимальность управления, т. е. оптимум выбранного критерия качества управления, при всех изменениях внешних условий и свойств объекта.
Принцип действия рассматриваемых самонастраивающихся САУ зависит от того, какой режим системы характеризуется принятым критерием качества – динамический или статический. Соответственно различают самонастраивающиеся САУ с оптимизацией динамических режимов и с оптимизацией статических режимов системы.
10.4.1. Самонастраивающиеся САУ с оптимизацией динамических режимов. В этих системах целью самонастройки является поддержание путем изменения настройки основной САУ экстремума какого-либо критерия качества, характеризующего динамические свойства системы. Чаще всего таким критерием является показатель качества переходного процесса или точность основной САУ при случайных воздействиях, а настраиваемыми параметрами – параметры корректирующих звеньев.
Поиск оптимума критерия качества J осуществляется путем поискового изменения надстроечных параметров корректирующих
звеньев, от которых зависит величина |
J , и вычисления |
соответствующего приращения J . На основание этого определяется направление, в котором следует изменять настройку коррекции, чтобы приблизиться к экстремуму J и в конце концов найти его.
Вычисление J при определенной настойке производиться, как и
264
в САУ со стабилизацией J, с помощью подачи на вход сигнала Gпр . |
||||
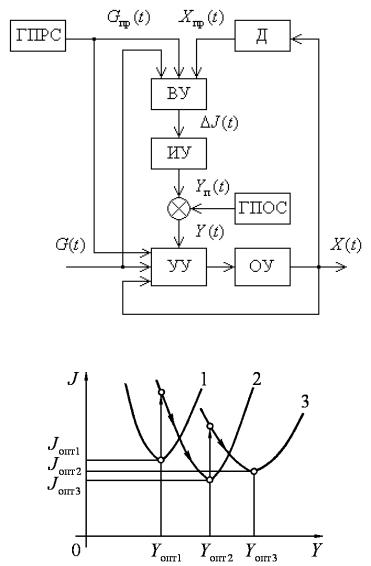
На рис. 10.6, а приведена схема САУ с экстремальной |
||||
настройкой. Здесь ГПРС – генератор пробного сигнала Gпр , ГПОС – |
||||
генератор поискового сигнала Yп , |
Д |
– |
детектор, выделяющий |
|
составляющую на выходе объекта |
X пр , |
вызванную сигналом Gпр . |
||
Вычислительное устройство |
ВУ |
здесь |
представляет собой |
|
автоматический оптимизатор. Если в |
САУ со |
стабилизацией |
J |
||||||||||||||||
вычислительное |
устройство |
выявляет |
отклонение J |
от |
заданного |
||||||||||||||
значения |
J з , т. е. величину |
J = J − Jз , то выдаваемый |
ВУ |
сигнал |
|||||||||||||||
J |
определяет |
|
отклонение |
J |
|
от |
заранее |
неизвестного |
его |
||||||||||
экстремального значения. Необходимое для этого приращение |
Yп |
||||||||||||||||||
настроечного параметра |
Y |
создается генератором поискового сигнала |
|||||||||||||||||
Г |
п . |
В |
результате |
|
система |
|
самонастройки |
осуществляет |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
автоматическое слежение за экстремумом J . |
|
|
|
|
|
||||||||||||||
3 – |
Работа системы иллюстрируется рис. 10.5, б. Здесь кривые 1, 2 и |
||||||||||||||||||
зависимости |
J |
от |
|
Y |
для |
|
трех |
последовательных моментов |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
времени. При смещении экстремума |
J |
система |
самонастройки |
||||||||||||||||
изменяет |
значение |
параметра |
|
Y |
так, |
чтобы |
J |
вновь |
имел |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
экстремальное значение. Стрелками показан процесс изменения
настройки для случая скачкообразного изменения зависимости |
J |
от |
Y . |
|
|
Таким образом, в САУ с экстремальной самонастройкой |
в |
|
общем случае требуются два специальных воздействия на основную
САУ со стороны системы самонастройки: пробный сигнал Gпр |
(для |
|
определения J при фиксированном Y ) и поисковый сигнал Yн |
(для |
|
определения направления изменения настроечного параметра |
Y |
для |
|
|
|
движения к экстремуму |
J ). |
В отдельных случаях система может быть упрощена путем
отказа от специальных сигналов Gпр и |
п |
Отказ от специального |
|
Y |
|
пробного сигнала Gпр возможен при использовании вместо него
естественных флуктуации на входе основной САУ, существующих при нормальной работе системы.
265
а
б
Рис. 10.6. Функциональная схема самонастраивающейся САУ с оптимизацией динамического режима
Примером такой экстремальной самонастраивающейся САУ может быть следящая система с самонастройкой коррекции на минимальную дисперсию выходного сигнала при непрерывно действующих случайном входном сигнале и помехе.
Возможность создания самонастраивающихся САУ с оптимизацией качества управления без специального поискового сигнала основана на знании и использовании математического описания, т. е. оператора объекта. Такие самонастраивающиеся САУ называются беспоисковыми или аналитическими. Зная оператор объекта и внешние воздействия (если последние необходимы для
266
определения критерия качества), можно аналитически определить оптимальную настройку системы. В этом случае этот расчет должен выполняться вычислительным устройством контура самонастройки. Наиболее простой случай при этом будет, когда оператор объекта известен заранее и неизменен, а причиной самонастройки является изменение внешних условий работы системы. В этом случае цепь самонастройки на экстремум осуществляется в виде разомкнутой системы компенсации, изменяющей настройку основной САУ в функции внешних воздействий.
10.4.2. Самонастраивающиеся САУ с оптимизацией статических режимов. Эти системы называются еще системами экстремального регулирования. Они являются простейшими самонастраивающимися САУ с оптимизацией качества управления. В них поддерживается оптимальное значение такого критерия, который характеризует работу объекта в статическом режиме, т.е. обеспечивается работа в точке экстремума соответствующей
статической характеристики |
|
|
|
|
Примером |
объекта |
такой |
системы |
экстремального |
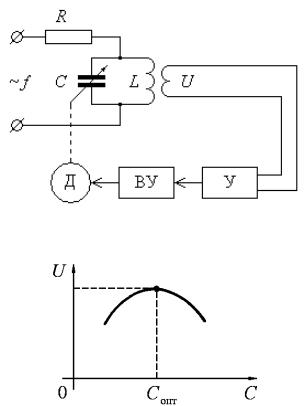
регулирования является система автоматической настройки колебательного контура в резонанс (рис. 10.7, а).
Такая задача существует, в частности, в радиоприемных и
радиопередающих устройствах. Контур |
LC |
настраивается с |
|
помощью переменного конденсатора |
C . Задача настройки – |
||
установка такого значения емкости C , при котором резонансная |
|||
частота контура совпадает с частотой |
f |
подаваемого на контур |
|
напряжения. Признаком такой настройки является максимум напряжения на резонансном контуре. Таким образом, задача настройки сводится к определению значения C , соответствующего максимуму напряжения на резонансном контуре (рис. 10.7, б). Причиной ухода от резонансной настройки может быть изменение частоты подаваемого на контур напряжения или изменение параметров контура, например, из-за изменения температуры.
267
а
б
Рис. 10.7. Система экстремального регулирования колебательного контура
Экстремальный регулятор состоит из усилителя |
У , |
|||||
усиливающего |
напряжение |
U , |
снимаемое |
с |
контура; |
|
вычислительного устройства ВУ и исполнительного двигателя Д, поворачивающее ротор конденсатора C . Вычислительное устройство автоматически выполняет ту же логическую задачу, что и оператор при ручной настройке контура. После включения в работу оно определяет направление, в котором надо изменять емкость, чтобы напряжение на контуре возрастало, т. е. определяет направление движения в сторону экстремума. Для этого исполнительный двигатель включается вначале в одном направления, а затем при необходимости – в другом, и устанавливается искомое направление вращения. Движение в найденном направлении продолжается де тех
пор, пока напряжение |
U |
не начинает уменьшаться после |
прохождения максимума. Тогда вычислительное устройстве изменяет направление вращения двигателя, чтобы вернуться в точку экстремума. В установившемся режиме исполнительный двигатель периодически реверсируется, создавая небольшие колебания
268