

1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1.1. Общие сведения
Курс теории автоматического управления предназначен для изучения общих принципов построения систем автоматического управления, процессов и методов исследования процессов в этих системах. Теория автоматического управления сформировалась в самостоятельную науку на основе изучения процессов управления техническими устройствами. Однако эти принципы управления имеют более широкий общий смысл и могут быть применены при
изучении процессов |
управления в иных системах, |
например |
|
в биологических, |
экономических, общественных и др. Наука, |
||
изучающая эти вопросы, называется кибернетикой. |
|
||
Кибернетика |
– |
наука об общих закономерностях |
процессов |
управления – основывается на изучении объектов управления при внешних воздействиях, получении информации о протекании процессов в этих объектах и выработке управляющих воздействий, обеспечивающих оптимальное в определенном заданном смысле состояние объектов.
Объектами управления могут быть живые организмы, коллективы людей, производственные предприятия, заводы, цехи, отдельные станки, машины, например самолеты, ракеты, двигатели.
Задачи управления в зависимости от объекта могут быть различными – от самых простых систем автоматического регулирования, поддерживающих неизменной какую-либо величину (например, напряжение, температуру или давление), до сложных, содержащих десятки вычислительных машин и решающих задачи оптимального управления множеством объектов.
Наука об управлении техническими системами называется технической кибернетикой. Разделами технической кибернетики являются теория информационных устройств, связанная со сбором и переработкой информации, необходимой для управления, и теория автоматического управления, связанная с управлением системой без непосредственного участия человека.
Проблема исследования функционирования человека в системе управления техническими устройствами представляет собой
8
самостоятельный раздел технической кибернетики, известный под названием «человек – машина».
В основу теории автоматического управления положена теория
автоматического |
регулирования, |
которая |
сформировалась |
в самостоятельную |
научную дисциплину только к 1940 г. |
||
Регулирование представляет собой разновидность управления. |
|||
Автоматическим регулированием |
называется поддержание |
||
постоянной или изменение по заданному закону некоторой величины, характеризующей процесс, осуществляемое при помощи измерения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Управление охватывает больший круг задач. Под автоматическим управлением понимается автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
Сравнивая определения управления и регулирования, можно заметить, что задачи регулирования входят в состав задач управления. Кроме того, задачи автоматического управления охватывают такие вопросы, как адаптация или самонастройка системы управления, в соответствии с изменением параметров объекта или внешних воздействий, вопросы формирования оптимальных управляющих воздействий, автоматического выбора наилучших режимов из нескольких возможных и другие, не входящие в круг задач автоматического регулирования.
1.2. Понятие об автоматическом управлении
Управление каким-либо объектом – это процесс воздействия на него с целью обеспечения требуемого течения процессов в объекте или требуемого изменения его состояния. Основой управления является получение и обработка информации о состоянии объекта и внешних условиях его работы для определения воздействий, которые необходимо приложить к объекту, чтобы обеспечить достижение цели управления.
Объект управления может принадлежать как к неживой природе, в частности, быть техническим устройством (самолет,
9
станок и т. п.), так и к живой природе (коллектив людей, животное и т. п.). В свою очередь, само управление также может осуществляться как человеком, (пилот управляет самолетом), так и техническим устройством, (самолетом управляет автопилот).
Управление, осуществляемое без участия человека, называется автоматическим управлением. Техническое устройство, с помощью которого осуществляется автоматическое управление объектом, называется управляющим устройством. В соответствии с конкретным техническим выполнением управляющее устройство может также именоваться управляющим прибором, системой или комплексом. Совокупность объекта управления и управляющего устройства образует систему автоматического управления (САУ).
Систему, в которой автоматизирована только часть операций, а другая же их часть (обычно наиболее ответственная) сохраняется за людьми, называют автоматизированной (частично автоматической) системой управления (АСУ).
При решении любой задачи управления, осуществляемого человеком или автоматом, необходимо рассматривать объект управления. Объект управления может быть представлен как управляемым техническим устройством, так и более простой системой управления. Во втором случае речь идет о некоторой иерархической системе управления, в которой система управления более сложная и включает в себя управляемую ею более простую систему или подсистему. Обычно элементарными системами являются системы регулирования.
Состояние объекта определяется рядом величин, характеризующих как воздействие на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого
объекта. Одни |
из этих величин |
измеряются в процессе |
работы |
и называются |
контролируемыми. |
Другие, влияющие на |
режим |
работы объекта, не измеряются и называются неконтролируемыми. Величины, выражающие внешнее влияние на объект,
называются воздействиями. Воздействия, вырабатываемые управляющим устройством или задаваемые человеком, называются управляющими воздействиями.
Воздействия на объект, не зависящие от системы управления, называются возмущениями. Возмущения можно подразделить на два вида: нагрузка и помехи. Наличие изменяющейся во времени
10
нагрузки обусловлено работой объекта, от нее объект принципиально не может быть защищен. Помехи бывают связаны с побочными, нежелательными явлениями и всякое уменьшение их улучшает работу объекта.
Контролируемые величины, характеризующие состояние объекта, по которым ведется управление, называются управляемыми, или регулируемыми, величинами. Обычно регулируемые величины в той или иной степени характеризуют качественные показатели процесса в управляемом объекте.
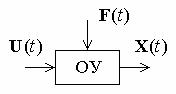
Величины, характеризующие воздействия и состояние объекта управления (ОУ), схематически показаны на рис. 1.1. Здесь совокупность неконтролируемых возмущений обозначена вектором
F F(t) [F (t), F |
(t), , F (t)]т |
, управляющих воздействий – |
|
1 |
2 |
l |
|
вектором U U(t) [U1(t),U2(t), ,Uk (t)]т, управляемых величин – вектором X X(t) [X1(t), X2(t), , Xm(t)]т, где знак «т» обозначает операцию транспонирования вектора.
Рис. 1.1. Объект управления
Координаты векторов U и X будем называть соответственно управляющими и управляемыми координатами, координаты вектора F – координатами внешних воздействий.
Если известно математическое описание объекта, то известна и система уравнений, связывающая управляемые величины со всеми внешними воздействиями на объект. При известных начальных условиях эта система уравнений дает возможность по внешним воздействиям U, F найти выходные управляемые величины X.
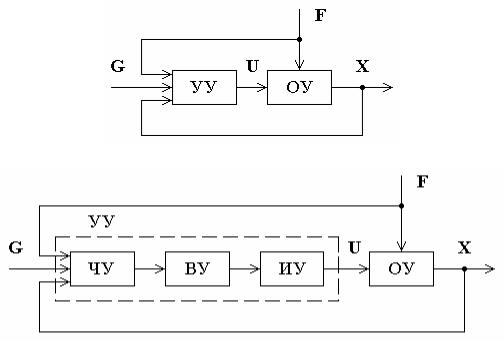
В наиболее общем виде система автоматического управления представлена на рис. 1.2, а, где ОУ – объект управления, УУ – управляющее устройство. Состояние объекта характеризуется выходной величиной X . В общем случае выходных величин
11
несколько, и тогда состояние объекта характеризуется вектором X, координатами которого являются отдельные выходные величины.
От управляющего устройства на вход объекта поступает управляющее воздействие (управление) U. Помимо управляющего воздействия к объекту приложено также возмущающее воздействие (возмущение, помеха) F, которое изменяет состояние объекта, т. е. X, препятствуя управлению. На вход управляющего устройства подается задающее воздействие (задание) G, содержащее информацию о требуемом значении X, т. е. о цели управления. Переменные U, G и F в общем случае являются векторами, как и X.
Как показано на рис. 1.2, а, в самом общем случае на вход управляющего устройства, помимо задающего воздействия G, поступает также информация о текущем состоянии объекта в виде выходной величины X и о действующем на объект возмущении F. Управляющее устройство перерабатывает получаемую информацию по определенному заложенному в нем алгоритму (правилу). В результате на его выходе возникает управляющее воздействие U.
а
б
Рис. 1.2. Система автоматического управления: а – блок-схема;
б – функциональная схема
На рис. 1.2, б изображена функциональная схема САУ, на которой показаны основные составные части управляющего
12
устройства: чувствительное устройство (ЧУ), вычислительное устройство (ВУ) и исполнительное устройство (ИУ).
Чувствительные устройства (измерительные устройства) служат для измерения переменных X, G и F.
Вычислительное устройство реализует алгоритм работы управляющего устройства, соответствующим образом перерабатывая поступающую от чувствительных устройств входную информацию. В простейшем случае оно осуществляет простые математические операции, такие как операция сравнения, определяющая разность G X, операции интегрирования, дифференцирования, статического нелинейного преобразования и т. п. В более сложных случаях вычислительное устройство может представлять собой вычислительную машину и даже комплекс таких машин.
Исполнительные устройства предназначены для непосредственного управления объектом, т. е. изменения его состояния в соответствии с сигналом, выдаваемым вычислительным устройством.
1.3. Классификация систем автоматического управления
Для ознакомления с основными видами систем автоматического управления рассмотрим классификацию САУ по ряду признаков, существенных с точки зрения теории автоматического управления.
1.3.1. Разомкнутые и замкнутые системы. В схеме САУ,
изображенной на рис. 1.2, а, на управляющее устройство поступают три вида информации: информация о величине X, определяющей состояние объекта, информация о величине G, задающей цель управления, информация о F – возмущениях, нарушающих режим работы объекта. Однако возможны САУ, в которых используется лишь часть перечисленной информации. При этом в зависимости от видов используемой управляющим устройством информации различают два основных типа САУ – разомкнутые системы
изамкнутые системы.
Вразомкнутых САУ выходная величина объекта X не измеряется, т. е. нет контроля за состоянием объекта. Разомкнутыми такие системы называются потому, что в них отсутствует обратная связь между выходом объекта и входом управляющего устройства,
13
при наличии которой объект и управляющее устройство образуют замкнутый контур.
Возможны разомкнутые САУ, в которых управляющее устройство измеряет только одно задающее воздействие G, одно возмущение F и, наконец, оба эти сигнала одновременно.
В первом варианте разомкнутой САУ управление осуществляется по задающему воздействию: поступающие извне команды G приводят путем изменения управляющего воздействия U к соответствующему изменению выходной величины объекта X (рис. 1.3, а). Точность обеспечиваемого при этом соответствия между X и G целиком определяется постоянством параметров системы и возмущений и никак не контролируется. Поэтому практически такие системы пригодны лишь при достаточно высокой стабильности указанных выше условий работы системы и невысоких требованиях к точности.
а |
б |
|
Рис. 1.3 |
Примером системы этого типа служит разомкнутая система программного управления напряжением генератора постоянного тока, изображенная на рис. 1.3, б. Объектом управления здесь является генератор Г, вращаемый с постоянной скоростью двигателем Д. Выходная величина объекта – напряжение генератора – определяется напряжением возбуждения, подаваемым на обмотку возбуждения генератора ОВ от устройства задания напряжения (УЗН). Последнее является управляющим устройством.
Напряжение возбуждения |
автоматически |
изменяется |
во времени |
||
в соответствии |
с заложенной |
в УЗН программой, |
обеспечивая |
||
соответствующее изменение напряжения генератора. |
|
||||
В такой системе управления действительное напряжение может |
|||||
значительно |
отличаться |
от |
заданного, |
например, |
вследствие |
14
изменения величины нагрузки генератора, скорости вращения двигателя, температуры обмоток генератора.
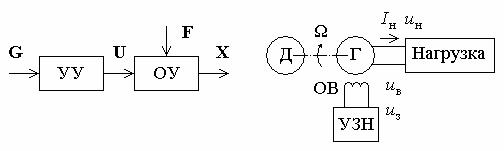
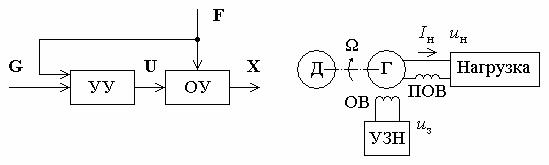
Вторым вариантом разомкнутой САУ является система автоматического управления по возмущению, или, как ее еще называют, система автоматической компенсации. Такие системы находят применение, в частности, когда задача управления сводится к поддержанию постоянства выходной величины X объекта
(рис. 1.4, а).
а |
б |
|
Рис. 1.4 |
На рис. 1.4, б в качестве примера такого типа системы показана система стабилизации напряжения генератора постоянного тока при переменной электрической нагрузке на его зажимах. В цепь нагрузки генератора включена последовательная (компаундная) обмотка возбуждения (ПОВ), реагирующая на изменение тока нагрузки Iн. При увеличении, например, нагрузки напряжение на зажимах генератора соответственно уменьшится за счет увеличившегося падения напряжения на обмотке статора. Однако одновременно за счет увеличения магнитного поля ПОВ, благодаря действию сигнала по току нагрузки, напряжение генератора возвратится к своему исходному значению. Таким образом, происходит компенсация влияния изменения нагрузки на напряжение генератора и обеспечивается поддержание напряжения на постоянном уровне в условиях переменной нагрузки.
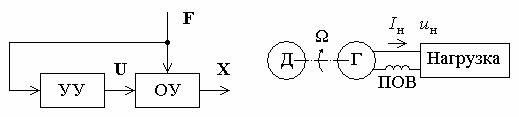
Система управления по задающему и возмущающему воздействиям является наиболее полным видом разомкнутой САУ. В этом случае управление объектом осуществляется в функции двух величин G и F, т. е. здесь объединены оба предыдущих варианта разомкнутых систем (рис. 1.5).
Примером такой системы может быть система программного управления напряжением генератора, объединяющая схемы,
15
изображенные на рис. 1.3, б и рис. 1.4, б. Генератор в этом случае имеет две обмотки возбуждения ОВ и ПОВ.
а |
б |
Рис. 1.5
Принцип компенсации возмущения позволяет существенно повысить точность управления в разомкнутых САУ. Однако все же эта точность остается невысокой, во-первых, вследствие невозможности охватить компенсацией все возмущения, действующие на систему и, во-вторых, из-за изменения во времени параметров объекта и управляющего устройства. В силу изложенного разомкнутые САУ нашли применение только при невысоких требованиях к точности управления.
Достоинством разомкнутых САУ являются устойчивость
ихорошие динамические характеристики.
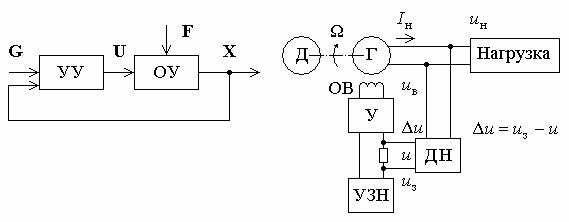
Взамкнутых САУ на вход управляющего устройства подаются задающее воздействие G и выходная величина объекта X. Исходя из величины G, управляющее устройство определяет соответствующее требуемое значение X и, имея информацию о текущем значении X, обеспечивает необходимое соответствие между X и G путем воздействия на объект управления (рис. 1.6, а).
Втаких САУ управляющее устройство стремится ликвидировать все отклонения X от его значения, определяемого заданием G. Это осуществляется независимо от причин, вызвавших эти отклонения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы.
САУ такого типа представляют собой замкнутый контур, образованный объектом и управляющим устройством. При этом управляющее устройство создает обратную связь вокруг объекта, связывая его выход с входом. Замкнутые САУ называются поэтому
16
еще системами с обратной связью или системами управления по отклонению. Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ.
а |
б |
|
Рис. 1.6 |
На рис. 1.6, б показана в качестве примера замкнутая система управления напряжением генератора постоянного тока. Управляющее устройство системы состоит из датчика напряжения ДН, устройства задания напряжения УЗН uз и усилителя У, являющегося одновременно и исполнительным устройством, воздействующим на объект управления.
Вычислительное устройство в схеме рис. 1.6, б представляет собой простейшую схему сравнения напряжений u и uз на входе усилителя, определяющую разность u uз u.
Напряжение U постоянного тока на выходе датчика напряжения ДН однозначно связано с напряжением генератора uн. Когда u uз, сигнал u на входе усилителя У равен нулю и управляющее устройство не действует на генератор, являющийся объектом управления. Если по какой-либо причине, например вследствие изменения нагрузки генератора или скорости его вращения, напряжение генератора изменится, на входе усилителя появится напряжение u соответствующей величины и знака. В результате на выходе усилителя возникнет напряжение, которое изменит ток возбуждения генератора, что приведет к возврату напряжения генератора к исходному значению.
17