

Недостатком замкнутых САУ являются плохие динамические
характеристики, возможная потеря устойчивости. |
|
|||
Комбинированные |
САУ представляют собой |
объединение |
||
в одну систему |
замкнутой системы |
управления по |
отклонению |
|
и разомкнутой |
системы |
управления |
по внешнему |
воздействию. |
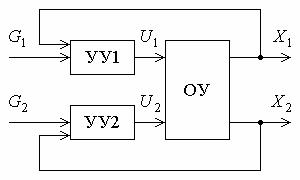
Показанная на рис. 1.2, а схема является схемой такой комбинированной САУ.
Такие САУ объединяют достоинства разомкнутых и замкнутых систем – быстрота реакции на изменение возмущений и точное регулирование, независимо от того, какая причина вызвала отклонение.
Примером комбинированной системы может служить система автоматического управления напряжением генератора, представляющая собой объединение схем рис. 1.3, б, рис. 1.4, б и рис. 1.6, б.
1.3.2. Системы автоматического регулирования. Частным, но широко распространенным видом систем автоматического управления являются системы автоматического регулирования (САР). Системой автоматического регулирования называется САУ, задача которой заключается в поддержании выходной величины объекта X на заданном уровне G, т. е. в поддержании равенства
XG.
Взависимости от характера задающего воздействия САР делятся на три вида: системы стабилизации, системы программного регулирования (управления) и следящие системы.
В системах стабилизации задающее воздействие постоянно, в системах программного регулирования оно изменяется по заранее заданному закону, в следящих системах оно тоже изменяется, но закон изменения заранее не известен. В последнем случае задающее воздействие поступает на систему извне и задачей системы является обеспечение слежения выходной величиной объекта за изменяющейся задающей величиной так, чтобы все время поддерживалось равенство X G.
Управляющее устройство в системах автоматического регулирования называется регулятором, а выходная величина – регулируемой величиной.
18
Примером системы стабилизации служит обычный стабилизатор напряжения; системы программного регулирования – система управления копировального станка; следящей системы – приборная сельсинная следящая система.
Другим примером системы автоматического регулирования может служить автопилот, ведущий самолет по заданному курсу. Однако если автопилот дополнить вычислительным устройством, которое определяет необходимое направление движения самолета исходя из задачи достижения определенной точки пространства за минимальный промежуток времени или при минимальном расходе горючего и т. п., то такую систему автоматического управления уже нельзя назвать системой регулирования.
1.3.3. Одномерные и многомерные системы. В зависимости от количества выходных координат объекта управления, образующих вектор выходной величины X, САУ делятся на одномерные и многомерные (двухмерные и т. д.).
Рассмотренные выше системы автоматического регулирования напряжения генератора постоянного тока являются одномерными системами. У генератора переменного тока наряду с напряжением иногда необходимо регулировать частоту путем воздействия на скорость вращающего его двигателя. При этом получается двухмерная САР. Блок схема такой САР приведена на рис. 1.7, а ее реализация представлена на рис. 1.8, где УЗН – устройство задания напряжения; УЗЧ – устройство задания частоты; ИН – измеритель напряжения; ИЧ – измеритель частоты, У – усилитель; ОВ – обмотки возбуждения двигателя и генератора.
Рис. 1.7. Блок-схема двумерной системы автоматического регулирования
19
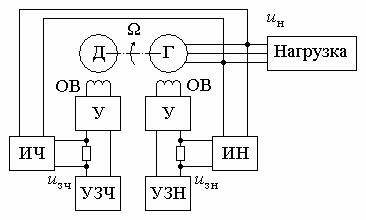
Рис. 1.8. Система автоматического регулирования напряжения и частоты синхронного генератора
Здесь измеритель частоты ИЧ представляет собой схему, выходом которой является напряжение постоянного тока, пропорциональное величине частоты синхронного генератора. Управление частотой осуществляется воздействием на скорость вращения двигателя путем изменения его тока возбуждения.
Многомерные системы, в свою очередь, делятся на системы несвязанного и связанного регулирования или управления.
Система несвязанного управления имеет несколько управляющих устройств, каждое из которых осуществляет управление своей выходной координатой объекта. При этом все эти устройства не имеют взаимных связей.
В системе связанного управления отдельные управляющие устройства связаны друг с другом внешними перекрестными связями.
Входящая в состав многомерной системы управления отдельная система управления называется автономной, если управляемая ею выходная координата объекта не зависит от значений остальных управляемых координат, так что изменение последних не вызывает изменения этой координаты. Многомерные системы принципиально можно сделать автономными путем наложения перекрестных связей между регуляторами. При этом получится система связанного управления.
1.3.4. Системы линейные и нелинейные. Линейной называется система, которая описывается линейными уравнениями. В противном случае система является нелинейной. Чтобы система была
20
нелинейной, достаточно иметь в ее составе хотя бы одно нелинейное звено, т. е. звено, описываемое нелинейным уравнением.
Для линейных систем справедлив принцип суперпозиции. Он заключается в том, что реакция системы на любую комбинацию внешних воздействий равна сумме реакций на каждое из этих воздействий, поданных на систему порознь. Принцип суперпозиции позволяет выразить реакцию системы на любое произвольное воздействие через реакцию системы на элементарное типовое воздействие, например, в виде ступеньки. Для этого достаточно представить данное входное воздействие в виде совокупности выбранных типовых воздействий. Благодаря принципу суперпозиции разработана общая теория линейных систем автоматического управления, описываемых линейными дифференциальными уравнениями любого порядка.
К нелинейным системам принцип суперпозиции не применим. Нет и общей теории нелинейных дифференциальных уравнений, на основе которой могла бы быть создана общая теория нелинейных систем автоматического управления. Существует лишь ряд частных методов для решения некоторых видов нелинейных уравнений. Вместе с тем, если не ограничивать диапазон изменения входных воздействий, то все реальные системы автоматического управления оказываются нелинейными. Трудность исследования нелинейных систем заставляет упрощать их описание, приближенно описывать их линейными уравнениями хотя бы в некоторых из интересующих нас режимов. Это называется линеаризацией нелинейных систем.
1.3.5. Системы стационарные и нестационарные.
Стационарной называется система, все параметры которой не изменяются во времени. Нестационарная система – это система с переменными параметрами. При математическом описании нестационарной системы это проявляется в том, что некоторые коэффициенты дифференциального уравнения системы являются функциями времени. Примером нестационарной системы является система управления ракетой, масса которой изменяется вследствие расхода топлива.
В отличие от нестационарной системы, реакция стационарной системы на одно и то же воздействие не зависит от момента приложения этого воздействия.
21
1.3.6. Системы непрерывного и дискретного действия. САУ бывают непрерывного или дискретного действия в зависимости от характера действия составлявших систему звеньев.
Система непрерывного действия, или аналоговая система, состоит только из звеньев непрерывного действия, т. е. звеньев, выходная величина которых изменяется плавно при плавном изменении входной величины.
Система дискретного действия, или дискретная система, – это система, содержащая хотя бы одно звено дискретного действия. Звеном дискретного действия называется звено, выходная величина которого изменяется дискретно, т. е. скачками, даже при плавном изменении входной величины. Характерным примером таких систем являются цифровые системы управления.
1.3.7. |
Системы |
обыкновенного, |
адаптивного |
и интеллектуального управления. По способу |
управления |
||
различают три основных типа САУ: системы обыкновенного, адаптивного и интеллектуального управления.
Обыкновенные системы (системы неадаптивного управления) с неизменяемыми характеристиками и алгоритмами функционирования в состоянии обеспечить приемлемое течение
управляемого |
процесса, |
если характеристики |
входных |
сигналов |
|
и объектов управления |
практически не |
изменяются в |
процессе |
||
работы или их изменения заранее известны. |
|
|
|
||
Системы |
адаптивного управления – |
это |
системы, |
которые |
|
способны приспосабливаться (адаптироваться) к изменяющимся или заранее неизвестным условиям своего функционирования, а также улучшать свою работу по мере накопления опыта путем автоматического изменения алгоритма управления. Область применения адаптивных САУ – это управление объектами, свойства или условия работы которых недостаточно известны или существенно непостоянны.
В системах интеллектуального управления алгоритмы управления построены на основе методов искусственного интеллекта. Такие системы являются наиболее совершенными по своим функциональным возможностям, приближаясь в пределе в этом отношении к возможностям человека.
22
1.4. Основные свойства систем автоматического управления
Как и у всякой динамической системы, процессы изменения выходных величин в системах автоматического управления делятся на установившиеся и переходные.
При рассмотрении процессов в САУ большое значение имеют следующие понятия: устойчивость системы, качество процесса управления и точность управления.
Устойчивость – это свойство системы возвращаться в установившееся состояние после того, как она была выведена из этого состояния каким-либо возмущением. Замкнутые системы автоматического управления, как всякие замкнутые системы, весьма склонны к потере устойчивости, что чаще всего проявляется в возникновении расходящихся колебаний (генерации). Необходимо отметить, что устойчивость является необходимым условием работоспособности всякой САУ.
Качество процесса управления характеризуется тем, насколько процесс управления близок к желаемому. Количественно оно определяется критериями качества, которые выбираются в соответствии с целью управления.
Точность управления характеризуется погрешностью системы в установившихся режимах. Например, для системы регулирования точность определяется величиной установившегося отклонения выходной величины объекта управления от заданного значения по окончании переходного процесса.
1.5. Основные этапы развития теории автоматического управления
С необходимостью построения регуляторов первыми, повидимому, столкнулись создатели высокоточных механизмов, в первую очередь часов. Даже очень небольшие, но действующие непрерывно помехи, накапливаясь, приводили в конечном итоге к отклонениям от нормального хода, недопустимым по условиям точности. Противодействовать им чисто конструктивными средствами, например, улучшая точность и чистоту обработки деталей, повышая их массу или увеличивая полезные усилия, не всегда удавалось, и для повышения точности в состав часов стали
23
вводить регуляторы. На рубеже нашей эры арабы снабдили поплавковым регулятором уровня водяные часы. В 1675 г. Гюйгенс встроил в часы маятниковый регулятор хода.
Первыми промышленными регуляторами в эпоху промышленной революции на рубеже XVIII и XIX столетий являются автоматический поплавковый регулятор питания котла паровой машины, построенный в 1765 г. И. И. Ползуновым в г. Барнауле; центробежный регулятор скорости паровой машины, на который
в1784 г. получил патент английский механик Дж. Уатт, первое программное устройство управления ткацким станком от перфокарты (для воспроизведения узоров на коврах), построенное в 1808 г. Жаккаром. Эти регуляторы как бы открыли путь потоку изобретений принципов регулирования и регуляторов, продолжавшемуся вплоть до середины XX в.
Паровая машина не случайно стала первым объектом для техники и теории регулирования, так как она не обладала способностью устойчиво работать сама по себе, не имела «самовыравнивания». Ее неблагоприятные динамические свойства часто приводили к тому, что подключенный к ней регулятор действовал не так, как ожидал конструктор, «раскачивал» машину или вообще оказывался неспособным управлять ею. Все это естественно побуждало к проведению теоретических исследований. Однако до конца 60-х гг. XIX в. теоретические исследования регулирования отличались «отсутствием системного подхода». Исследователи еще не ощущали, что в технике рождается новое направление. Они считали, что регуляторы были лишь вспомогательным придатком к машине, приборной разновидностью «уравнителей хода». Во многих работах рассматривались идеальные безынерционные регуляторы. Шагом вперед были работы, учитывавшие динамику регулятора, но и в них регулятор рассматривался отдельно от машины. Авторы обычно добивались хорошего успокоения колебаний самого регулятора, считая, что этого достаточно для его спокойной работы на машине. При таких подходах теоретические исследования не могли стать основой для новой науки, а были лишь дополнительными частными проработками
врамках прикладной механики и ее раздела о паровых машинах. Коренное изменение в подходе к проблеме и в методологии
исследований внесли три фундаментальные работы, содержавшие по
24
существу изложение начал новой науки: работы Дж. Максвелла «О регуляторах» (1866) и И. А. Вышнеградского «Об общей теории регуляторов» (1876) и «О регуляторах прямого действия» (1877).
Дж. Максвелл и И. А. Вышнеградский осуществили системный подход к проблеме, рассмотрев регулятор и машину как единую динамическую систему. Это позволило дать общий методологический подход к исследованию самых разнородных по принципам действия и конструкции систем, заложить основы теории устойчивости и установить ряд важных общих закономерностей регулирования по принципу обратной связи. Особо важную роль в то время сыграла работа И. А. Вышнеградского, отличавшаяся глубоким инженерным подходом, рассмотрением самых важных для техники тех лет объектов и содержавшая кроме ценных практических рекомендаций также методы исследования качества регулирования. Именно И. А. Вышнеградского современники считали основоположником теории автоматического регулирования.
Теория автоматического регулирования окончательно сформировалась в самостоятельную научную дисциплину только к 40-м гг. XX в.
Теория автоматического управления создавалась как развитие и обобщение теории автоматического регулирования. Поэтому первым ее этапом стало распространение линейной теории автоматического регулирования на более общую задачу управления объектами и процессами.
Далее были разработаны принципы анализа и синтеза нелинейных, нестационарных, дискретных, оптимальных
иадаптивных систем автоматического управления.
Всередине XX в. возникло новое научное направление – кибернетика. Книга его основателя Н. Винера «Кибернетика или управление и связь в животном и машине» (1948) инициировала плодотворную для дальнейшего развития теории автоматического
управления |
идею, |
исходя из |
общности |
принципов управления |
в технике и |
живой |
природе, |
использовать |
опыт живой природы |
в организации управления техническими системами.
На начальном этапе своего развития кибернетика не привнесла в ТАУ заметных новшеств. Объясняется это тем, что технические автоматические системы оказались весьма примитивными по сравнению с живыми прототипами. Однако со временем после
25
развития современных ЭВМ, |
сенсорных |
систем, адаптивных |
и интеллектуальных алгоритмов |
управления |
идея плодотворности |
технической реализации достижений живой природы стала приобретать все большее значение.
Научное направление, получившее в 60-гг. XX в. название «искусственный интеллект», возникло в ходе исследований по созданию все более разумных технических систем. Начало этому было положено использованием математической логики с созданием соответствующих компьютерных программ.
В настоящее время появление и развитие роботов
ироботизированных производств представляет собой новую промышленную революцию.
Современная теория автоматического управления – результат плодотворного труда многих зарубежных и отечественных ученых.
1.6.Примеры систем управления авиационными объектами
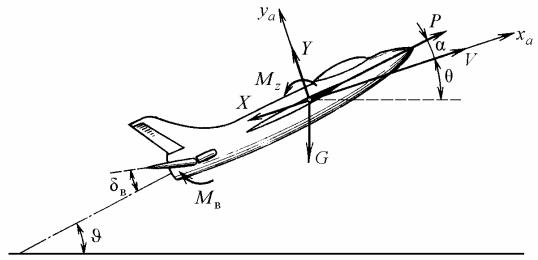
1.6.1.САУ самолетом. Движение летательного аппарата, при котором вектор скорости центра масс лежит в вертикальной плоскости симметрии, называется продольным (рис. 1.9). Оно характеризуется тремя степенями свободы: двумя составляющими скорости движения центра масс, лежащими в плоскости симметрии,
ивектором угловой скорости вращения относительно центра масс, нормальным по отношению к плоскости симметрии.
Рис. 1.9. Продольное движение самолета
26
Управляемыми |
величинами являются скорость |
движения V |
и угол тангажа |
. Управление летательным |
аппаратом |
осуществляется с помощью изменения силы тяги P, совпадающей по направлению с продольной осью аппарата, и положения руля высоты (угол δв), изменяющего вращающий момент, который поворачивает аппарат в вертикальной плоскости симметрии.
Углом тангажа называется угол, образуемый продольной осью ЛА с горизонтальной плоскостью. Угловыми выходными координатами ЛА в продольном движении следует считать углы тангажа и наклона вектора скорости в вертикальной плоскости. Эти углы связаны с углом атаки α θ.
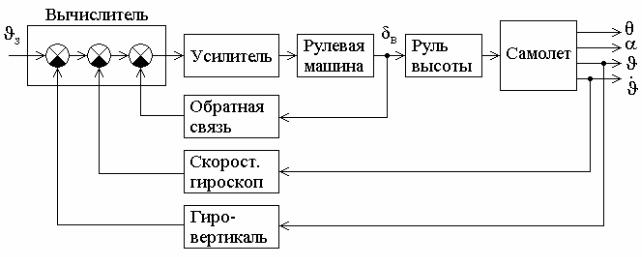
Рис. 1.10. Функциональная схема канала тангажа САУ самолета
Система управления углом тангажа самолета служит для выдерживания нужной траектории движения в вертикальной плоскости и реализуется с помощью соответствующего канала автопилота. Функциональная схема канала тангажа представлена на рис. 1.10. В качестве чувствительных элементов в этом канале используются гировертикаль и скоростной гироскоп. Сигналы датчиков, обратной связи и задатчика после суммирования в вычислителе поступают на усилитель и затем на рулевую машину, которая перемещает руль высоты самолета.
27