

9. Шариковые подшипники качения. Определение динамической грузоподьемности.
Грузоподъемность подшипников. Статическую и динамическую грузоподъемность определяют в зависимости от условий работы и конструктивных особенностей с учетом распределения нагрузки между телами качения и контактных напряжений для каждого типоразмера подшипника. Значения грузоподъемности являются для подшипника справочными величинами и указываются вместе с другими параметрами в каталогах 15) (см., например, табл. 3.1).
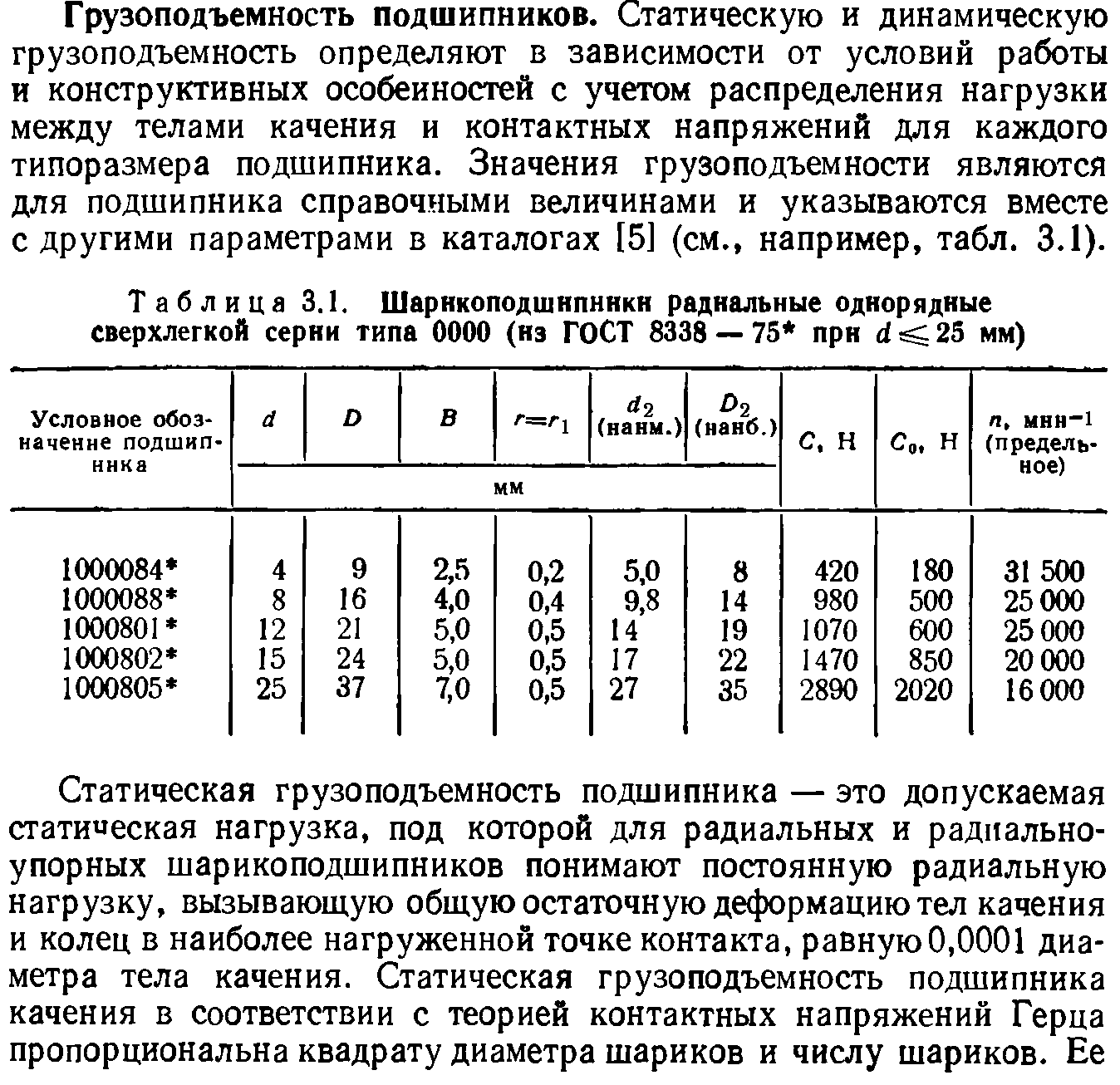
Статическая грузоподъемность подшипника — это допускаемая статическая нагрузка, под которой для радиальных и радпально-упорных шарикоподшипников понимают постоянную радиальную нагрузку, вызывающую общую остаточную деформацию тел качения и колец в наиболее нагруженной точке контакта, равную0,0001 диаметра тела качения. Статическая грузоподъемность подшипника качения в соответствии с теорией контактных напряжений Герца пропорциональна квадрату диаметра шариков и числу шариков. Ее определяют по формуле: С0 = f0izd2ш cos α, где f0 — коэффициент, зависящий от геометрии деталей подшипника, точности их изготовления и материала (для радиальных и радиально-упорных шарикоподшипников принимают f0 = 1,25); i — число рядов тел качения; z — число тел качения в одном ряду; dш — диаметр тела качения, мм; α — угол контакта.
Динамическая
грузоподъемность для радиальных и
радиально- упорных подшипников
— это такая постоянная радиальная
нагрузка, которую подшипник (с
вращающимся внутренним кольцом)
может выдержать в течение нормального
срока службы, исчисляемого в 1 млн.
оборотов внутреннего кольца, без
проявления признаков усталости материала
любого кольца или тела качения не менее
чем у 90% из определенного числа
подшипников, подвергаемых испытаниям.
Формулы для расчетов динамической
грузоподъемности получены в результате
обработки экспериментальных данных и
отличаются в зависимости от типа и
размеров подшипника. В частности,
для радиальных и радиально-упорных
подшипников:
![]() ;
;![]() ,
гдеС
— динамическая грузоподъемность;
fc
—
коэффициент, зависящий от типа
подшипника, геометрии его деталей,
точности их изготовления, материала и
термообработки.
,
гдеС
— динамическая грузоподъемность;
fc
—
коэффициент, зависящий от типа
подшипника, геометрии его деталей,
точности их изготовления, материала и
термообработки.
10. Шариковые подшипники качения: конструкции, материалы.
Достоинства: малый момент трения, достаточно высокая нагрузочная способность, малый момент трения покоя, не требуют смазки, малая чувствительность к колебаниям температур, шариковые подшипники стандартизованы в малом производстве, а значит взаимозаменяемы.
Недостатки: сложность конструкции, сравнительно высокая чувствительность к ударам и большим нагрузкам.
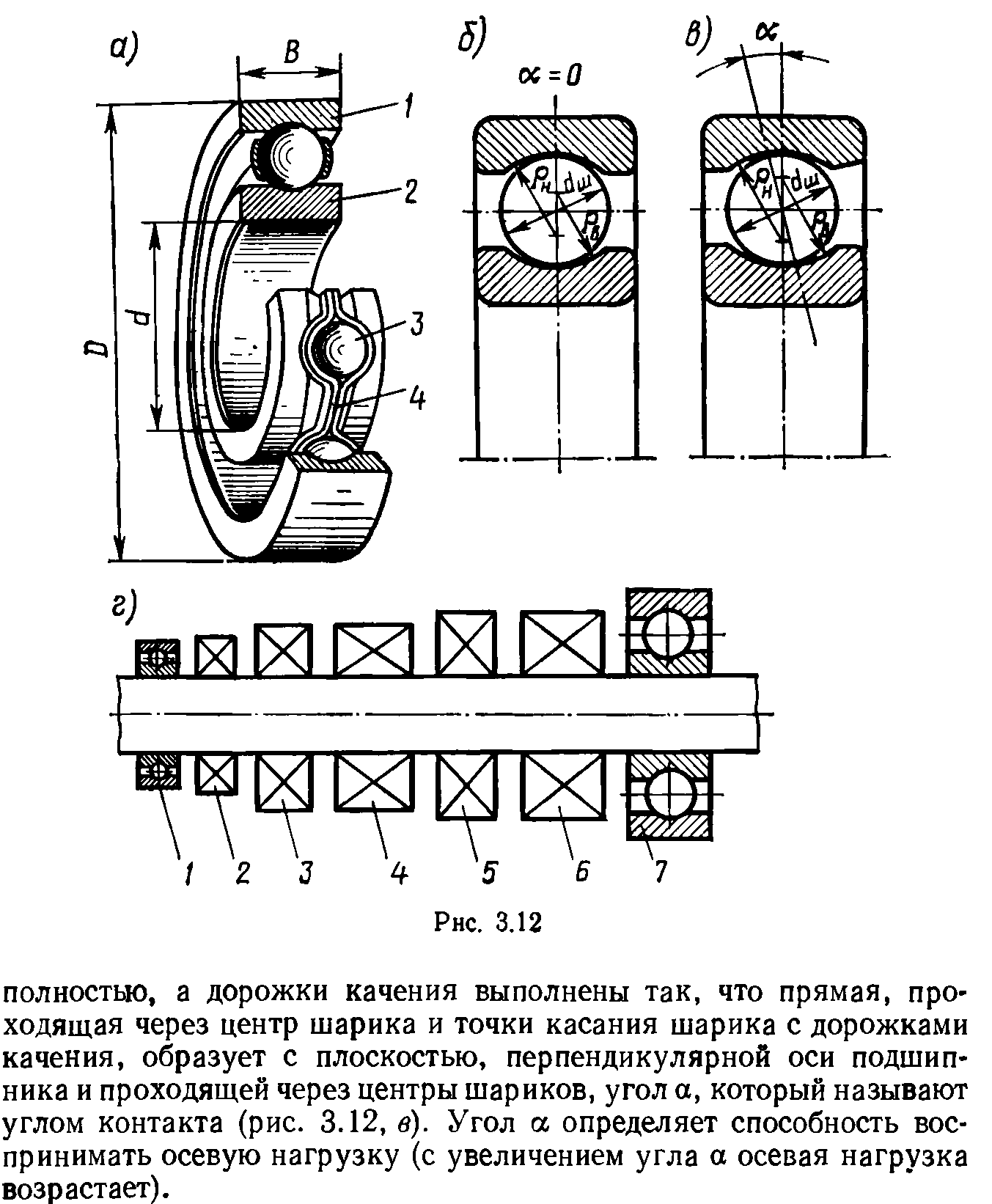
Дорожки качения выполнены так, что прямая, проходящая через центр шарика и точки касания шарика с дорожками качения, образует с плоскостью, перпендикулярной оси подшипника и проходящей через центры шариков, угол α, который называют углом контакта (рис. 3.12, в). Угол α определяет способность воспринимать осевую нагрузку (с увеличением угла а осевая нагрузка возрастает).