

47. Фрикционная передача: определение силы прижатия фрикционных дисков.
Определение
силы прижатия
Fr
производят
из предположения, что для преодоления
момента М2
нагрузки, приложенного к ведомому
валу (см. рис. 5.3, а)
,
необходимо наличие достаточной по
величине силы трения. Сила трения
Fтр
между
катками определяет то окружное усилие
F,
которое
может передать каток 1 на каток
2. Поэтому
принимаем, что
Fтр≥F.
Следовательно,
![]() ;
;
![]() .
.
Из
рис. 5.3 следует, что
![]() или
F
=
или
F
=
![]()
Зависимость
М2тр
от
Fr
можно
считать пропорциональной Fr
и
равной М2тр=
f’
Fr,
где
f’
— приведенный коэффициент трения (см.
с. 64). Тогда
![]() и
и
![]() .
.
Момент М1 находим из равенства 2(М1- М1тр)/d1=2(М2- М2тр)/d2: М1= (М2+ М2тр)/(i12+ М1тр). При приближенных расчетах пренебрегаем трением в опорах, т. е.
при М1тр = М2тр = 0. В этом случае М1=М2/i12. Сила прижатия Fr может быть очень большой, значительно превосходящей окружную силу Fr=Fβ/f. Для того чтобы уменьшить силу прижатия катков, иногда применяют клинчатые фрикционные колеса (см. рис. 5.2, г), при расчете которых в формулу (5.2) вместо коэффициента трения f вводят f1= f/sin а, где а — угол наклона рабочей поверхности фрикционных колес. Окружная сила, которая при этом может быть передана, F≤ Fтр и Fтр = Fr f/ sin а = Frf1.
46. Фрикционная передача: виды скольжения, причины.
Существенным недостатком клинчатых передач является наличие значительного геометрического скольжения. Скольжение во фрикционных передачах нарушает равномерность вращения ведомого колеса, приводит к износу поверхностей.
Различают три вида скольжения: буксование, упругое скольжение и геометрическое скольжение.
Буксование возникает при перегрузке, когда F > FTp. В этом случае ведомый каток затормаживается или даже останавливается, а ведущий продолжает вращаться, вызывая выделение теплоты и местный износ поверхности ведомого катка, нарушая его правильную форму, следствием чего являются вибрации и удары.
Упругое
скольжение
вызывается упругими деформациями
волокон материала ведущего и ведомого
катков в зоне их контакта. Процесс
упругого скольжения достаточно сложен
и рассматривается в специальной
литературе по фрикционным передачам.
Упрощенно его можно пояснить следующим
образом [39]. Волокна материала ведущего
катка 1 (рис. 5.5,
а)
перед точкой их контакта
К
сжаты, а волокна ведомого катка
2
растянуты, что условно показано различной
штриховкой (редкой и частой). После
прохождения
точки К волокна обоих катков
возвращаются к исходной длине, вследствие
чего происходит их относительное
скольжение. Скорость такого скольжения
(упругого) зависит от упругих свойств
материалов фрикционной пары и окружной
силы и составляет 0,5...1% от окружной
скорости. Она увеличивается с
уменьшением модулей упругости материалов
фрикционных пар. Подбором материалов
значения упругости скольжения можно
свести к минимуму. Так, например, применяя
материалы большой твердости (сталь-сталь,
сталь-текстолит), относительное
скольжение можно свести к минимуму
(0,2... 1%).
![]()
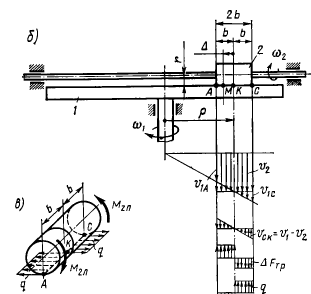
Геометрическое
скольжение
рассмотрим на примере лобового варианта
(рис. 5.5, б) . Рассмотрим случай, когда
диск 1 ведущий, а ролик
2
— ведомый. Допустим вначале, что ролик
имеет закругление или он настолько
тонкий, что его контакт с диском
происходит в точке К. Тогда из условия
равенства окружных скоростей точек
диска и ролика, т. е. v1,
= v2
или
w1р
= w2r,
получим выражение для передаточного
отношения i12
=
w1/w2
= r/р.
Это передаточное отношение можно
принять за номинальное (расчетное).
Если длиной ролика 2b
пренебречь
нельзя, то в этом случае передаточное
отношение отклонится от номинального
и тем больше, чем больше нагрузка на
ролик и его длина. Номинальное значение
передаточного отношения можно варьировать
путем изменения р. При конечной длине
ролика 2b
скорости
всех точек его образующей
АС
одинаковы и равны, а соответствующие
им скорости точек диска изменятся
пропорционально их расстояниям от оси
его вращения. В точке К, где окружные
скорости диска и ролика одинаковы,
скольжение отсутствует (нескользящая
точка). Во всех остальных точках по
длине контактной линии
АС
слева и справа от точки
К
происходит проскальзывание, вызывающее
появление элементарных сил трения. На
рис. 5.5, б показаны эти силы трения,
приложенные к точкам диска. Знак скорости
проскальзывания меняется при переходе
через нескользящую точку, называемую
полюсом качения. Если нескользящая
точка находится в середине контактной
линии
А
С, т. е. в точке К, то моменты трения Mтр
л
и Mтр.п.
относительно
оси ведомого ролика, возникающие от
элементарных сил трения AFTp
и
соответствующих им элементарных
окружных сил AF,
передающихся
на ролик (рис. 5.5, б, в), равны и вращение
ролика, а следовательно, и преодоление
момента полезного сопротивления
(нагрузки) М2 невозможны. Эти моменты
только скручивают ролик (см. рис. 5.3,
в). Чтобы
ролик начал вращаться, нескользящая
точка (полюс качения) должна сместиться
на некоторую величину А от точки К,
например в точку М (рис. 5.5 б). При ведущем
диске нескользящая точка, называемая
полюсом качения, смещается в направлении
оси диска, при ведущем ролике - в
противоположном направлении. Размер
смещения А определяем, исходя из того,
что разность моментов от элементарных
сил трения на участках AM
и
МС должна уравновесить момент нагрузки
М, на ведомом валу. Эти моменты
![]() .
.
их
разность
![]() откуда
откуда![]() .
.
Из этой формулы следует, что геометрическое скольжение А тем больше, чем больше длина 2b ролика и момент нагрузки М2. Оно уменьшается при увеличении силы прижатия Fr, радиуса ролика r3 и коэффициента трения f. При А = b нескользящая точка переместится в крайнее положение, т. е. в точку А. При дальнейшем увеличении нагрузки ролик начинает скользить по всей длине и наступает буксование. Геометрическое скольжение относится к числу силовых потерь фрикционных передач. Введением автоматического поджатия, т. е. увеличением силы Fr, оно может быть снижено и даже устранено. При наличии геометрического скольжения А изменяется и передаточное отношение i12 = r/( р - A). Аналитическое выражение геометрического скольжения A меняется в зависимости от конструкции фрикционных передач. В конструкциях, где относительное скольжение контактирующих точек отсутствует (см., например, рис. 5.3), геометрического скольжения нет. Во фрикционных передачах для обеспечения постоянства i12 приданном положении колес и изменении нагрузки необходимо изготовлять колеса из материалов с большим E; применять автоматическое нажатие (Fr), обеспечивающее постоянство отношения M2/Fr; детали передачи, от деформации которых зависит положение пятна касания, выполнять возможно более жесткими; применять пары с начальным касанием по линии, а не в точке.