

2965
.pdfp 2
mкм  N r 31 мм.
N r 31 мм.
Способ среднего весового. Этот способ приводит к тому же результату, что и способ эквивалентной замены.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|||
|
В первом приближении высоты HR |
|
|
|
HT узловых точек R и Т находят по |
|||||||||||||||||||||||||||||
формуле среднего весового как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
p1H1 p2 H2 |
|
, |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
p1 p2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p3 H3 p4 H4 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
, |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
p3 p4 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где |
H |
|
H |
|
h |
i 1, 2, 3, 4 ; |
|
p |
|
|
1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
i |
исх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
i |
|
|
|
|
|
|
i |
|
|
|
|
Li |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
равны |
|
|
|
||||||
|
Веса высот узловых точек H R |
|
|
и HT |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
pR p1 p2 , |
|
|
|
|
|
pR p3 p4 , |
|
|||||||||||||||||
а обратные веса |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
q |
|
|
|
1 |
|
|
1 |
|
|
, |
|
|
|
|
q |
1 |
|
1 |
. |
|
||||||||
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
pR |
|
p1 p2 |
|
|
|
|
|
T |
|
pT |
p3 p4 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
Вычисляют невязку по ходу RT как разность |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
W h5 HT |
HR . |
|
|
|
||||||||||||||||||
|
Полученную невязку W распределяют пропорционально обратным весам, |
|||||||||||||||||||||||||||||||||
т.е. вычисляют поправки в превышение |
h5 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
и высоты HR , |
HT : |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
W |
|
|
q5 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
qR ; |
|
|
(218) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q , |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
T |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
q |
|
1 |
p5 |
; |
q q |
|
q |
q . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
5 |
|
|
|
5 |
|
|
R |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В результате определяют окончательные значения высот узловых точек |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R , |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
HR HR |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
T |
|
|
H |
|
. |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
T |
|
|
|
|
|||||
101
Учитывая, что в выражении (218) поправка 5 в превышение h5 |
хода RT |
||||||
уже известна, то поправки i в превышения 1 – 4 ходов определятся как |
|
||||||
1 |
H1 |
H R |
, |
|
|||
2 H2 |
H R |
|
|
||||
, |
(219) |
||||||
|
|
|
|
|
|
|
|
3 |
HT |
H3 , |
|
||||
|
4 |
H |
4 |
H |
T |
. |
|
|
|
|
|
|
|||
Поправки i распределяют на измеренные на станциях превышения i - го
хода по формуле (190) или (192).
Уравнивание системы (см. рис. 13) по способу среднего весового произведено в табл. 16.
Уравнивание систем теодолитных ходов с двумя узловыми точками, как и систем с одной узловой точкой (см. § 38), производят раздельно для горизонтальных углов и приращений координат по формулам (207) ÷ (219), заменив высоты узловых точек на обозначение дирекционных углов ij узловых линий
и, далее, на обозначение координат узловых точек, а веса p ij вычисляют обрат-
но пропорциональными числу углов хода.
Необходимо отметить, что уравнивание более сложных систем (с числом узловых точек более двух и включающих полигоны) способами эквивалентной замены и среднего весового вызывает определенные трудности. Для таких систем разработаны другие способы уравнивания: способ последовательных приближений (итераций), способ полигонов и др.
Таблица 16.
Уравнивание нивелирной сети с двумя узловыми точками способом среднего весового
НА=15,000 м; |
НВ=13,000 м; |
НС=11,870 м; |
НD=16,480 м |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хода№ |
Превышеhния |
Высоты Н |
ДлиныхоLдов |
|
|
|
|
|
|
|
|
|
|
Высоты |
|
|
, |
|
Поправки υ |
Поправки υ |
|
|
|
|
|
|
1 |
|
|
|
′H |
|
Обратные qвеса q |
|||||||||
|
|
м , |
м , |
км , |
|
|
|
|
|
|
|
|
|
T |
Веса |
q , |
|
T |
мм |
||
|
|
|
|
|
|
|
|
|
Веса |
|
|
|
|
|
м , |
T |
|
мм , |
|
||
|
|
i |
i |
i |
|
|
|
pi |
|
|
|
|
|
|
H, ′ |
pR, pT |
R |
5 |
,υ |
i |
|
|
|
|
|
|
|
|
|
|
|
Li |
|
|
|
|
R |
|
|
|
R |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
+4,980 |
10,020 |
2,0 |
|
|
|
|
0,50 |
|
|
|
|
10,000 |
0,83 |
1,20 |
|
–22 |
+42 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
+3,030 |
9,970 |
3,0 |
|
|
|
|
0,33 |
|
|
|
|
|
–8 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
+0,100 |
11,970 |
4,0 |
|
|
|
|
0,25 |
|
|
|
|
12,000 |
0,45 |
2,25 |
|
+41 |
+71 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
4 |
+4,442 |
12,038 |
5,0 |
|
|
|
|
0,20 |
|
|
|
|
|
–3 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
+2,100 |
|
2,0 |
|
|
|
|
0,50 |
|
|
|
|
|
|
|
2,00 |
|
|
–37 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W h5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
HT |
HR 100 мм, |
|
|
|
|
||||||||||||
|
|
|
|
|
H |
R |
H |
|
R |
9,978 |
м; |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
H |
T |
H |
|
|
12,041 |
м; |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
T |
|
|
T |
|
|
|
|
|
|
|
|||
102
mкм 31 мм.
§39. Способ последовательных приближений
Данный способ выгодно применять в случаях, когда в системе ходов имеется несколько исходных пунктов и несколько узловых точек.
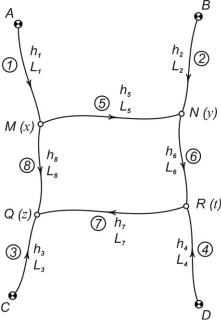
Приведенная на рис. 14 система состоит из 8 нивелирных ходов с 4 узловыми точками; стрелками показаны направления положительных превышений. Известны отметки исходных репе-
ров A, B, C и D (HA, HB, HC и HD); в результате нивелирования получены суммы превышений hi по
каждому ходу и длины ходов Li.
Для представленной на рис. 14 сети нивелирных ходов можно составить следующие параметрические уравнения поправок:
Рис.14.Схема к уравниванию нивелирных ходов способом последовательных приближений
x H |
|
h |
; |
|
|
|||||
|
|
A |
1 |
|
|
|
1 |
|
|
|
y H B h2 2 ; |
|
|||||||||
z H |
C |
h |
|
; |
|
|
||||
|
|
3 |
|
|
|
3 |
|
|
|
|
t H |
D |
h |
|
4 |
; |
|
|
|||
|
4 |
|
|
|
|
|
(220) |
|||
y x h5 5 ; |
|
|
||||||||
|
|
|
||||||||
t y h6 6 ; |
|
|
|
|
||||||
|
|
|
|
|||||||
z t h7 7 ; |
|
|
|
|||||||
|
|
|
|
|||||||
z x h |
|
|
|
|
|
|
||||
8 |
, |
|
|
|
|
|||||
|
|
|
8 |
|
|
|
|
|
|
|
где x, y, z, t – высоты узловых точек M, N, Q, R; hi – превышение по i - му ходу (i = 1, 2, …, 8); HA, HB, HC, HD – высоты исходных пунктов.
Выражения для вычисления высот узловых точек запишутся в виде:
|
|
|
|
|
p |
H |
|
h |
p |
y h |
p |
z h |
|
|
|
|
||
|
|
x |
1 |
|
A |
1 |
5 |
5 |
8 |
|
8 |
|
|
; |
|
|||
|
|
|
|
|
|
|
p1 p5 p8 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
y |
|
p2 H B h2 p5 x h5 p6 t h6 |
|
|
|
|||||||||||
|
|
|
; |
|
||||||||||||||
|
|
|
|
|
|
|
p2 p5 p6 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(221) |
|||
|
|
|
|
|
p3 HC h3 p8 x h8 p7 |
t h7 |
|
|
||||||||||
|
|
z |
|
; |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
p3 p8 p7 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
H |
|
h |
p |
y h |
p |
z h |
|
|
|
|
||
|
|
|
|
p |
D |
|
|
|
||||||||||
|
|
t |
|
4 |
|
4 |
6 |
6 |
7 |
|
7 |
|
|
, |
|
|||
|
|
|
|
|
|
|
|
p4 p6 p7 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где p |
|
– веса превышений h , |
определяемые как |
p |
1 |
. |
|
|
|
|||||||||
i |
|
|
|
|
||||||||||||||
|
|
|
|
|
i |
|
|
|
|
|
i |
Li |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обозначив
103
p1 p5 p8 pM , p2 p5 p6 pN , p3 p8 p7 pQ ,
p4 p6 p7 pR ,
вычисляют приведенные веса
p |
p1 |
|
, |
p |
|
p5 |
, |
p |
|
p8 |
|
, |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
1M |
|
|
|
|
pM |
|
|
5 M |
|
|
|
|
pM |
|
|
8 M |
|
|
|
|
pM |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
p |
|
|
|
|||||||
p2 N |
|
2 |
|
, |
p5 N |
|
|
5 |
|
, |
p6 N |
6 |
|
, |
|
||||||||||||
|
pN |
|
|
pN |
|
|
pN |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(222) |
||||||
|
|
|
p3 |
|
|
|
|
|
|
|
p8 |
|
|
|
|
|
p7 |
|
|
|
|||||||
p |
|
, |
p |
|
, |
p |
|
, |
|
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
3Q |
|
|
|
|
pQ |
|
|
8Q |
|
|
|
|
pQ |
|
|
7 Q |
|
|
pQ |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
p4 |
|
|
|
|
|
|
|
p6 |
|
|
|
|
|
|
|
p7 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
p |
|
|
|
, |
p |
|
|
|
, |
p |
|
|
|
|
. |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
4 R |
|
|
|
|
pR |
|
|
6 R |
|
|
|
|
pR |
|
|
7 R |
|
|
|
|
pR |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для того, чтобы процесс приближений был более коротким, в качестве начальных принимают высоты узловых точек, получаемые путем передачи от ближайших исходных реперов:
x0 y0 z0 t0
H |
|
h ; |
|
|
|
A |
1 |
|
|
H B |
h2 |
; |
(223) |
|
HC |
h3 |
|
||
; |
|
|||
|
|
|
|
|
H D h4 . |
|
|||
На основе выражений (221) и с учетом обозначений (222) и (223) вычисляют высоты точек в первом приближении
x 1 p1M x0 p5 M y0 h5 p8 M z0 h8 |
|
, |
|
y 1 p2 M y0 p5 N x 1 h5 p6 N t0 h6 |
|
|
|
, |
|
||
|
|
|
(224) |
z 1 p3Q z0 p8Q x 1 h8 p7 Q t0 h7 |
|
|
|
, |
|
||
|
|
|
|
t 1 p4 Rt0 p6 R y 1 h6 |
p7 R z 1 h7 |
. |
|
|
|
Используя полученные в первом приближении значения высот, вычисляют высоты узловых точек во втором приближении
104
x 2
y 2
z 2
t 2
p1M x0 p5 M y 1 h5 p8 M z 1 h8 |
, |
|
||
p2 M y0 p5 N x 2 h5 p6 N t 1 h6 |
, |
|
|
|
|
|
|||
|
|
|
|
(225) |
p3Q z0 p8Q x 2 h8 p7 Q t 1 h7 |
|
|
|
|
, |
|
|||
p4 Rt0 p6 R y 2 h6 p7 R z 2 h7 |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
Вычисления заканчивают, если в последних двух приближениях получены одинаковые значения высот узловых точек, т.е.
x k x k 1 , |
|
|
|
|
|
y k y k 1 , |
(226) |
|
z k z k 1 |
|
|
, |
|
|
t k t k 1 . |
|
|
|
|
|
Эти приближения являются окончательными (уравненными) значениями высот узловых точек, которые принимают за исходные. В результате сеть распадается на 8 отдельных ходов, каждый из которых уравнивают по правилам, принятым для одиночного хода.
Оценка точности сети производится по формуле (217).
Пример уравнивания нивелирной сети вышеизложенным способом (см. рис. 14) приведен в табл. 17.
Сеть теодолитных ходов уравнивается по аналогичной методике; при этом уравнивание углов и приращений координат выполняют раздельно.
§ 40. Уравнивание систем ходов способом полигонов проф. В.В. Попова
Данный способ применяют для уравнивания как свободных, так и несвободных сетей нивелирных и теодолитных (полигонометрических) ходов.
Как уже отмечалось ранее, свободными называются такие геодезические сети, в которых имеются только необходимые исходные элементы: координаты одного исходного пункта и дирекционный угол исходного направления, высота одного исходного репера и т.п. Наличие в сети избыточных исходных данных вызывает дополнительные условия, которым должны удовлетворят уравненные величины; такие сети являются несвободными.
Сущность способа В.В. Попова рассмотрим на примере уравнивания свободной сети нивелирных ходов.
105
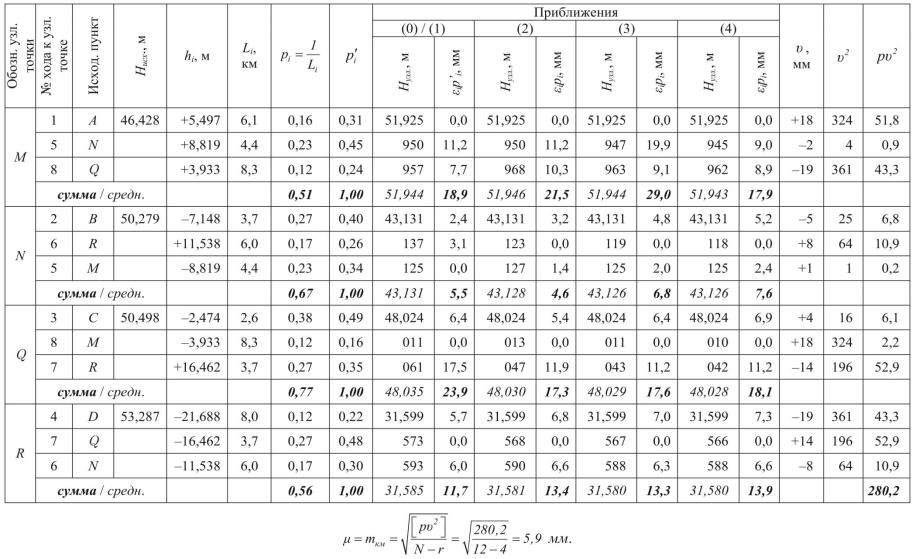
Таблица 17.
Уравнивание системы нивелирных ходов способом приближений
106
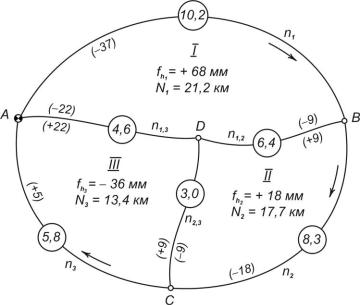
Уравнивание сети методом непосредственного решения системы уравнений поправок. Пусть нивелирная сеть состоит из трех примыкающих
друг к другу полигонов, невязки в которых соответственно равны fh1 , fh2 и fh3 (рис. 15). Направления ходов в полигонах показаны стрелками.
Обозначим длину каждого звена (или число станций) между двумя узловыми точками через n с указанием номеров полигонов, к которым данное звено принадлежит. Тогда длины внешних звеньев полигонов AB, BC и AC будут соответственно
n1, n2 и n3, а общие для двух смежных полигонов звенья AD,
|
BD и CD – n1,3, n1,2 и n2,3. |
|
Если каждый из рассмат- |
|
риваемых полигонов рассмат- |
|
ривать как независимый, то для |
|
устранения невязок в каждом из |
Рис 15. Схема к уравниванию свободной нивелирной |
них длины звеньев нужно ум- |
сети способом полигонов |
ножить на поправки k1, k2 и k3, |
|
приходящиеся на один километр длины каждого полигона. Тогда условия устранения невязок в полигонах можно записать в виде системы уравнений:
n1 n1,2
n2 n2 ,3
n3 n1,3
n1,3 |
k1 |
W1 |
0; |
|
|
n1,2 |
k2 |
W2 |
|
|
(227) |
0; |
|||||
n2 ,3 k3 W3 |
0, |
|
|
||
|
|
||||
|
|
|
|
|
|
где W1, W2, W3 – свободные члены уравнений, равные невязкам в соответст-
вующих полигонах fh1 , fh2 и fh3 .
Поскольку в системе уравнений (227) суммы величин в скобках представляют собой периметры полигонов N1, N2 и N3, то систему уравнений можно записать в виде
N1k1 W1 |
0, |
|
|||||
N2 k2 |
W2 |
|
|
(228) |
|||
0, |
|||||||
N |
3 |
k |
3 |
W |
0. |
|
|
|
|
3 |
|
|
|
||
Следует учесть, что выше приведенные уравнения составлены для независимых полигонов и не учитывают условия смежества (по терминологии В.В. Попова) полигонов. Поэтому для учета этого условия в первом полигоне общую поправку N1k1 следует уменьшить на величины поправок, приходящие-
107
ся на смежные звенья BD и CD; при этом надо иметь в виду, что для двух смежных полигонов поправки на одно и тоже звено будут иметь противоположенные знаки. Например, если поправка по звену BD для первого полигона равна +n1,2k1, то для второго полигона поправка по этому же звену будет – n1,2k1.
Аналогичные соображения в отношении поправок действуют и по другим смежным звеньям. Тогда уравнения (227) следует записать в следующем виде:
n1 |
n1,2 |
n1,3 |
k1 |
n1,2 k2 |
n1,3k3 |
W1 |
0; |
|
|
n2 |
n2 ,3 |
n1,2 |
k2 |
n2 ,3k3 |
n1,2 k1 |
W2 |
|
|
(229) |
0; |
|||||||||
n3 n1,3 n2 ,3 k3 n1,3k1 n2 ,3k2 W3 0.
Врезультате решения системы уравнений находят поправки k1, k2 и k3 на один километр хода внешних звеньев AB, BC и AC. Поправки на смежные звенья AD, BD и CD можно получить на основе некоторого преобразования системы уравнений (229).
Раскрыв скобки в уравнениях (229), запишем:
n1k1 n1,2 k1 |
n1,3k1 |
n1,2 k2 |
n1,3k3 |
W1 0; |
|
||||||||||
n2 k2 n2 ,3k2 |
n1,2 k2 n2 ,3k3 n1,2k1 W2 |
|
|
|
|||||||||||
0; |
(230) |
||||||||||||||
n k |
3 |
n k |
3 |
n |
k |
3 |
n k n |
k |
2 |
W 0. |
|
|
|||
3 |
1,3 |
2 ,3 |
|
1,3 |
1 |
2 ,3 |
|
3 |
|
|
|
||||
Проведя перегруппировку членов уравнений, получим:
n1k1 n1,2 |
k1 |
k2 n1,3 |
k1 |
k3 |
W1 |
0; |
|
|||||||
n2 k2 n2 ,3 k2 |
k3 n1,2 k2 k1 W2 |
|
|
|
||||||||||
0; |
(231) |
|||||||||||||
n k |
3 |
n |
k |
3 |
k |
n |
k |
3 |
k |
2 |
W 0. |
|
|
|
3 |
1,3 |
|
1 |
2 ,3 |
|
|
3 |
|
|
|
||||
Нетрудно убедиться, что разности коэффициентов в скобках представляют собой поправки на один километр длины смежных звеньев в прямом (по ходу часовой стрелки) и обратном направлениях, а их произведения на длину звеньев – суммарную поправку в превышения по тем же звеньям.
С учетом принятых обозначений окончательно система уравнений (229) примет вид:
N1k1 n1,2 k2 |
n1,3k3 |
W1 |
0; |
|
||||||||
N2 k2 n2 ,3k3 |
n1,2 k1 |
W2 |
|
|
|
|||||||
0; |
(232) |
|||||||||||
N |
3 |
k |
3 |
n k n |
k |
2 |
W 0. |
|
|
|||
|
|
1,3 |
1 |
2 ,3 |
|
3 |
|
|
|
|||
Уравнения системы (232) можно легко составить по схеме сети (см. рис. 15), руководствуясь следующими правилами:
–первый член каждого уравнения представляет собой произведение поправочного коэффициента ki на периметр полигона Ni, где i – номер полигона;
–второй и третий члены уравнений есть произведения поправочных коэффициентов смежных полигонов на длины соответствующих звеньев;
108
– четвертый (свободный) член каждого уравнения равен невязке соответ-
ствующего полигона, т.е. Wi fhi .
После решения системы уравниваний суммарные поправки в превышения по звеньям вычисляют как:
1 |
n1k1 ; |
1,2 |
n1,2 k1 k2 ; |
1,3 |
n1,3 |
k1 |
k3 ; |
2 n2 k2 ; |
2,1 n2,1 k2 k1 ; |
2,3 n2,3 k2 k3 ; |
|||||
3 |
n3k3 ; |
3,2 |
n2,3 k3 k2 ; |
3,1 |
n1,3 |
k3 |
k1 . |
Следует отметить, что для нивелирных сетей данный способ уравнивания является строгим и дает результаты, идентичные уравниванию по способу наименьших квадратов.
Ниже приводиться пример уравнивания свободной сети нивелирных ходов по способу полигонов В.В. Попова с непосредственным решением системы нормальных уравнений поправок.
Пример. Требуется уравнять нивелирную сеть IV класса, схема которой приведена на рис. 15. В кружках указаны длины звеньев в километрах, внутри полигонов написаны их номера и невязки в миллиметрах.
Решение выполняется в следующей последовательности.
1. Руководствуясь выше приведенными правилами, по схеме сети составляем систему уравнений поправочных коэффициентов:
21,2k1 6 ,4k2 4,6k3 68 0; 17,7k2 6 ,4k1 3,0k3 18 0; 13,4k3 3,0k2 4,6k1 36 0.
2. Решив систему уравнений, получаем значения поправочных коэффициентов:
k1 3,66; k2 2,18; k3 0,94.
3. Вычисляем поправки в превышения для каждого звена:
для звена AB |
1 n1k1 |
10,2 3,66 37 мм; |
|
|||||
// |
BC |
2 n2k2 |
8,3 2,18 18 мм; |
|
|
|||
// |
CA |
3 n3k3 |
5,8 0,94 5 мм; |
|
|
|||
// |
BD |
|
n |
k |
k |
6,4 3,66 |
|
2,18 9 мм; |
|
|
1,2 |
1,2 |
1 |
2 |
|
|
|
// DB
// CD
// DC
// DA
2,1
2,3
3,2
1,3
n |
k |
2 |
k |
|
6,4 2,18 |
3,66 9 |
||
1,2 |
|
1 |
|
|
|
|||
n |
k |
2 |
k |
|
|
3,0 2,18 0,94 9 |
||
2,3 |
|
|
3 |
|
|
|||
n |
k |
k |
2 |
3,0 0,94 2,18 9 |
||||
2,3 |
|
|
3 |
|
|
|
||
n |
k |
|
|
k |
|
4,6 3,66 |
0,94 22 |
|
1,3 |
1 |
3 |
|
|
|
|
||
мм; мм; мм; мм;
// |
AD |
|
n |
k |
k |
4,6 0,94 |
3,66 |
22 мм. |
|
|
3,1 |
1,3 |
3 |
1 |
|
|
|
Вычисленные поправки записываем в скобках около соответствующих звеньев каждого полигона.
109
4. Выполняем контроль уравнивания сети: сумма поправок по звеньям в каж-
дом полигоне должна равняться невязке с обратным знаком, т.е. |
i fh |
||||
i . |
|||||
Полигон I |
– |
37 9 22 68 мм, |
( fh 68 мм); |
||
|
|
|
|
1 |
|
// |
II |
– |
18 9 9 18 мм, |
( fh 18 мм); |
|
|
|
|
|
2 |
|
// |
III |
– |
5 22 9 36 мм, |
( fh 36 |
мм). |
|
|
|
|
3 |
|
Следовательно, уравнивание сети выполнено правильно.
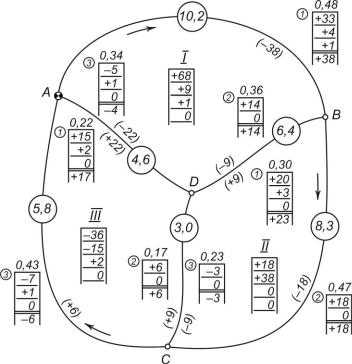
Способ красных чисел. Проф. В.В. Поповым предложен простой, но достаточно точный способ уравнивания систем полигонов непосредственно по схеме, без составления уравнений поправок и ведомостей вычислений; он получил название способа «красных чисел». Сущность способа заключается в последовательном распределении невязок в каждом полигоне пропорционально длинам сторон или числу станций.
Рассмотрим порядок уравнивания этим способом свободной сети нивелирных ходов, используя исходные данные предыдущего примера (см. рис. 15).
1. На основе схемы сети составляют схематический чертеж сети в крупном масштабе, на котором производится вычисление поправок на звенья (рис.
16).
В центре каждого полигона строят рамочки (I, II, III), внутри которых за-
Рис.16. Схема уравнивания свободной нивелирной сети способом «красных чисел»
писывают невязки. Вне полигона у каждого его звена строят рамочки для запи-
110